引言
本文引用地址:
随着家电市场的不断发展,更多智能化和自动化的电器进入了人们的生活,尤其是。在系统中,目前使用的电机驱动器有有刷和无刷两种。由于对的使用寿命和效率要求变高,越来越多的客户趋向于选择无刷直流电机 (BLDC)。 器件是一款全集成的无刷直流电机驱动器(包括控制算法、栅极驱动器和 FET)。本应用手册讨论了如何将 MCx 器件用于扫地机器人系统中的吸尘电机、滚刷电机和拖布电机,并进行了市场分析。
扫地机器人
虽然扫地机器人的结构因不同供应商提供的功能而异,但其中的基本电机在市场上是通用的。无刷直流电机主要应用于吸尘电机、滚刷电机和拖布电机。与有刷电机相比,BLDC 可实现静音操作且电机寿命更长,因此,一些客户在带有霍尔传感器的扫地机器人的轮子中使用 BLDC。MCx 器件具有极富竞争力的控制算法。 集成的控制算法以及丰富的控制功能,使得 可以在不同的电机应用场景中游刃有余。
MCx8316x
三款器件的工作电压均为 4.5V 至 35V,绝对最大电压为 40V,峰值电流为 8A。这些器件的封装尺寸为 7mm x 5mm,高度为 1mm。客户可根据其实施电机驱动器的子系统选择所需的器件。
MCT8316A 和 MCF8316A
MCT8316A 和 MCF8316A 是无代码无传感器 BLDC 电机驱动器。MCT8316A 提供无代码无传感器梯形控制解决方案,而 MCF8316A 提供无代码无传感器磁场定向控制 (FOC) 解决方案。MCF8316A 中的转子位置通过 BEMF 观测器进行估算,而 MCT8316A 中的转子位置通过反电动势过零进行测量。梯形解决方案通常适用于需要高速运行(电机频率高达 3kHz)和快速启动时间(小于 50ms)的客户应用。FOC 解决方案适用于驱动速度受控型的客户应用,可以降低电机换向产生的可闻噪声。
MCT8316Z
MCT8316Z 提供了一个配有传感器的单芯片、无代码梯形解决方案。MCT8316Z 适用于需要高启动扭矩和精确速度控制的客户应用。
应用
对于扫地机器人,可将 MCx8316x 器件用于三个主要子系统:吸尘电机、滚刷电机和拖布电机。滚刷电机和拖布电机如图 1 所示。吸尘电机位于扫地机器人内部,在机器人外部看不到。
吸尘电机
扫地机器人的吸尘电机不断移动并吸走地面的灰尘和碎屑,这意味着电机会遇到不同程度的污垢,并且必须在不同的地板类型(地毯、硬木或瓷砖)上吸起灰尘和碎屑。因此,强烈建议客户使用 MCT8316A 和 MCF8316A。MCF8316A 和 MCT8316A 可以分别实现 1.5kHz(2 极电机为 90kRPM)和 3kHz(2 极电机为 180kRPM)的高速旋转。更高的电机转速将转化为更强的吸力,可以更轻松地吸起较脏区域的灰尘和碎屑。两款器件都具有恒速功能,可以在遇到动态负载条件时保持恒速。例如,当扫地机器人从硬木地板移动到地毯时,吸尘电机可能会遇到负载变化的情况。由于器件具有恒速功能,扫地机器人从硬木地板移动到地毯时产生的更大阻力不会影响吸力。
可靠的电机启动
MCF8316A 和 MCT8316A 器件具有相同的启动特性。通过对齐或初始位置检测 (IPD),可以准确检测电机的转子位置,确保可靠的电机启动。
即时启动
即时启动功能可在扫地机器人反复打开和关闭时实现平滑的正向和反向同步。例如,扫地机器人在检测到吸尘口被堵塞时可能需要停止电机然后重新启动。
功率限制
CF8316A 和 MCT8316A 具有功率限制功能,可防止电池出现电涌。此功能用于扫地机器人经过较大的碎屑和污垢区域的场景。负载突然变化会导致电机消耗更多电能并产生尖峰。功率限制功能会设置功率阈值以避免发生尖峰。这延长了电池的使用寿命,从而使消费者不必更换器件。
自动死区时间补偿
CF8316A 器件的另一个关键特性是可以更大限度地降低可闻噪声。集成的 FOC 算法通过产生平滑的相电流来优化噪声性能。图 2 显示了 MCF8316A 相电流波形。
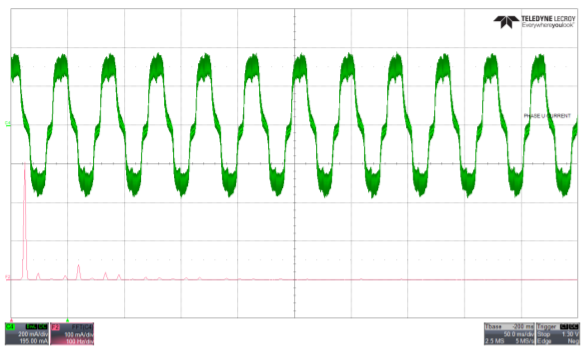
图 2. 相电流波形与 FFT - 禁用死区时间补偿
正弦波电流有利于降低噪声。波形越平滑,产生的噪声就越低。为了进一步让正弦波形更加的平滑,客户可以启用死区时间补偿。图 3 显示了启用死区时间补偿后的 MCF8316A 相电流波形。
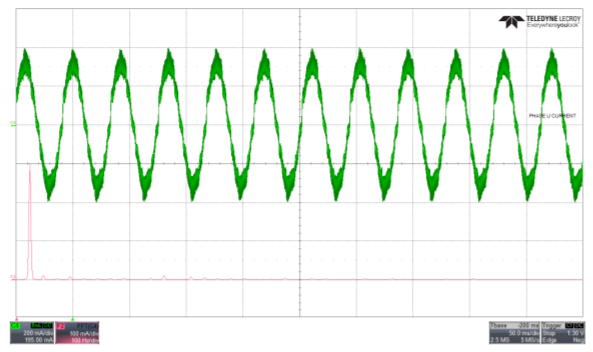
图 3. 相电流波形与 FFT - 启用死区时间补偿
我们使用手持声级计进行了一项实验,展示了优化噪声性能之前和之后不同电机速度下的噪声水平。
图4显示了优化噪声前后 MCF8316A 的可闻噪声对比图。
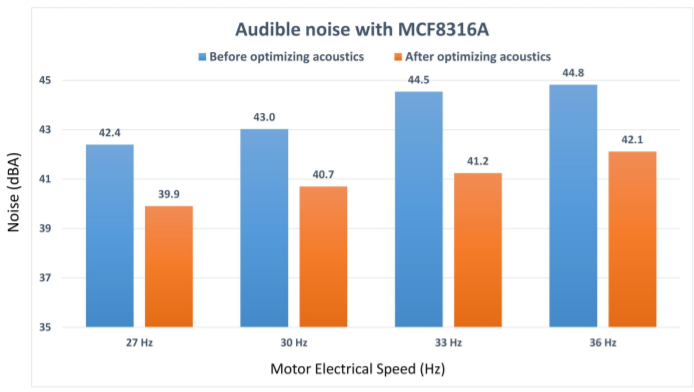
图 4. MCF8316A 的可闻噪声比较
MCT8316A 能够使用 120° 和 150° 换向。MCT8316A 通过 150° 换向可提供更好的噪声性能。图 5 显示了 MCT8316A 中 120° 和 150° 换向之间的噪声对比图。
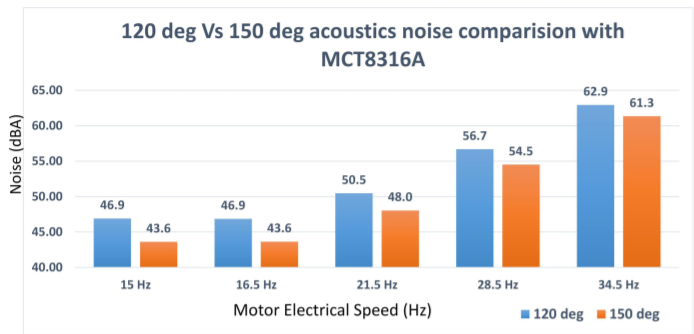
图 5. 120° 换向与 150° 换向之间的可闻噪声比较
扫地机器人被用作多任务设备。消费者会在扫地机器人清洁房子时做一些其他事情,所以改善电机噪声性能是消费者选购扫地机器人的重要参考。MCF8316A 和 MCT8316A 都能够改善可闻噪声。
滚刷电机和拖布电机
对于滚刷电机和拖布电机,我们推荐使用 MCT8316A 和 MCT8316Z。MCT8316Z 除了具有与上述 MCT8316A 相同的特性,还具有一些其他特性。滚刷电机和拖布电机需要更高的扭矩和加速能力。这是因为滚刷和拖布在机器人工作时需要与地面的碎屑和灰尘直接接触。例如,滚刷会在地毯和碎屑上滚动,这些碎屑可能会使滚刷卡住(可能是食物残渣、头发甚至袜 子)。MCT 器件能够达到的更高扭矩将使扫地机器人能够在动态负载条件下持续运行。
快速加速是 MCT 器件的另一个重要特性。当从正在清洁的房间的狭窄角落移动到的宽敞区域时,快速加速可以使器件轻松快速地达到可变速度。
尽可能减少功率损耗在扫地机器人中也很重要,因为这种损耗会转化为热能。由于器件遇到的负载不断变化,因此确保机器人不会过热很重要。MCT 器件具有自动同步整流 (ASR) 和自动异步整流 (AAR) 功能,以及 95mΩ 的低 RDS(ON),可降低功率器件的损耗,从而减少系统发热。
表 1. 器件系列特性

结语
MCx8316x 能够满足客户对扫地机器人的不同特性需求。客户可以在这些功能丰富的集成驱动器中选择任意一款用于吸尘、滚刷和拖布电机,并将其实施到设计中,为设计添彩。随着越来越多的消费者转向智能设备并寻找提高家居效率的方法,扫地机器人的市场在不断增长。作为一款一体化解决方案,MCx8316x 集成了消费者所需的功能,可以给客户的产品带来更多的优势。
