众所周知,拍照已经成为智能手机中不可或缺的一项重要功能,它除了是消费着选择手机的一大要素外,同时也是手机厂商们比拼的厮杀点。“五摄”、“1亿像素”、“AI拍月亮”都成了手机厂商“取悦”消费者的方式之一。
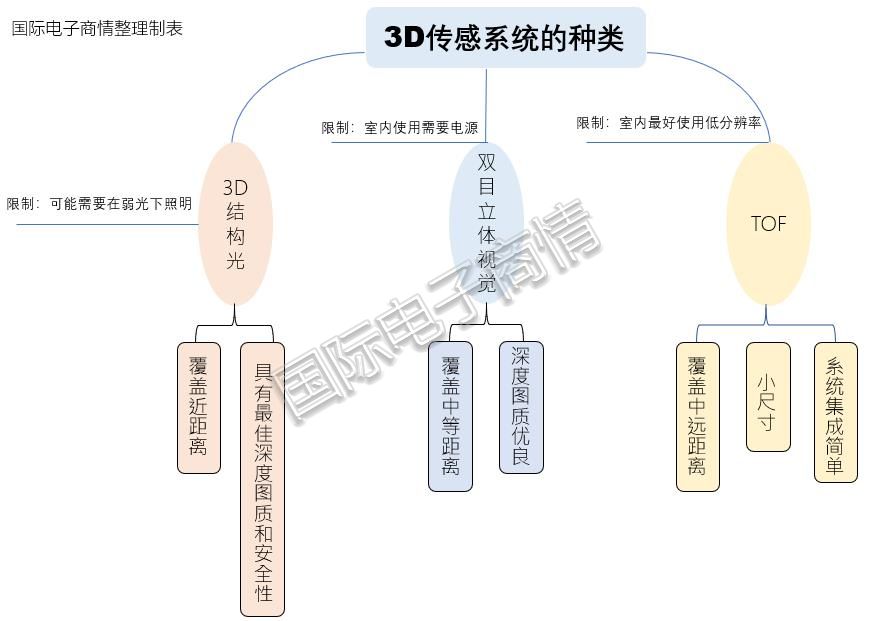
3D Sensing也是智能手机创新的趋势之一,当前正加速向中低端手机渗透。公开资料显示,目前实现3D Sensing共有三种技术,分别为双目立体成像、3D结构光和TOF,目前已经比较成熟的方案是结构光和TOF。其中3D结构光方案最为成熟,并被大规模应用于工业3D视觉,TOF则凭借自身优势成为在移动端较被看好的方案。
3D结构光最早应用于苹果旗舰机iPhone X,结构光原理为通过近红外激光器向物体投射具有一定结构特征的光线,再由专门的红外摄像头进行采集获取物体的三维结构,再通过运算对信息进行深入处理成像。该技术目前共有编码结构光和散斑结构光两种实现类别。
结构光技术仅需一次成像就可得到深度信息,具备低能耗、高成像分辨率的优势,能够在安全性上实现较高保证,因此被广泛应用于人脸识别和人脸支付等场景。但结构光技术识别距离较短,大约在0.2米到1.2米之间,这将其应用局限在了手机前置摄像,主要用于3D人脸识别屏幕解锁、人脸支付及3D建模等。
TOF(Time of Flight)技术是2018年才被应用到手机摄像头的3D成像技术,其通过向目标发射连续的特定波长的红外光线脉冲,再由特定传感器接收待测物体传回的光信号,计算光线往返的飞行时间或相位差,从而获取目标物体的深度信息。TOF镜头主要由发光单元、光学镜片及图像传感器构成。其识别距离可达到0.4米到5米,因此已有品牌,如OPPO、华为等,将其应用于手机后置摄像。
TOF技术具备抗干扰性强、FPS刷新率更高的特性,因此在动态场景中能有较好表现。另外TOF技术深度信息计算量小,对应的CPU/ASIC计算量也低,因此对算法的要求更低。但相对于结构光技术,TOF技术的缺点在于其3D成像精度和深度图分辨率相对较低,功耗较高。
双目立体视觉(Binocular Stereo Vision)技术始于上世纪的60年代中期,该技术是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。经过几十年来的发展,立体视觉在机器人视觉、航空测绘、反求工程、军事运用、医学成像和工业检测等领域中的运用越来越广。
由于双目立体成像系统在场景缺乏特征时,经常会受到性能下降的困扰,因此在未被应用在智能手机成像中。举个例子,在面对墙壁平坦光滑的表面的情况下,立体成像系统捕获的 3D 信息通常不完整或不准确。
根据咨询机构Yole 的预测,受益于消费电子市场可预见的爆发式增长,全球3D成像与传感的市场规模将从2016年的13亿美元增长至2022年的90亿美元,复合年均增长率(CAGR)达到38%。其中,用于消费电子的3D成像与传感市场将从2016年的2000万美元增长至2022年的60.58亿美元,复合年均增长率达到158%。
iPhone X对3D结构光的应用带动了这项技术的发展和渗透,目前相较于TOF,结构光技术在应用上更为成熟,出货量上明显占优。而且结构光的扫描效果更为真实,具备更强的3D还原能力。但遗憾的是,其作用距离的劣势限制了其应用。
而TOF技术弥补了的距离上的缺陷,由于能够支持更远的作用距离,TOF技术可被应用于包括3D人脸识别、3D建模以及手势识别、体感游戏、AR/VR在内的更多场景中,从而为智能手机更娱乐性和实用性的体验。此外,相比结构光技术,TOF的模组复杂度低,堆叠简单,可以做到非常小巧且坚固耐用,在屏占比不断提高的外观趋势下,更得到手机厂商的青睐。
根据国盛证券的报告数据显示,就出货量上来看,智能手机3D感测需求从2017年的4000万部增加至2019年的2亿部以上,其中2019年的TOF机型还主要集中在几款高端旗舰机,但从2020年开始,TOF手机的出货量将进一步爆发,在整体3D感应中占比有望达到40%。预计2019/2020年TOF手机的出货量为7760万,同比大幅增长747%。[!--empirenews.page--]
成本方面,预计TOF和结构光的BOM成本大约为12-15美元和20美元,相比之下TOF更具有成本优势。以iPhone X为例,结构光技术的解决方案包括三个子模块(点投影仪、近红外摄像机和泛光照明器+接近传感器),而TOF解决方案则将三个集成到一个模块中,芯片的成本大约占到整体BOM的28%-30%。
3D Sensing成趋势,TOF应用前景广阔,成为移动端搭载3D Sensing的主要选择。据悉,苹果公司也将在2020年发布的新iPhone系列产品中的Pro和Max两个版本都将搭载后置3D摄像头(TOF)。

TOF和结构光二者虽然原理不同,但其所需要的核心部件基本相同,TOF中的核心部件包括发射端的VCSEL光源、Diffuser等,接收端的镜头、窄带滤光片、近红外CMOS等。
目前TOF或结构光的3D感知技术均为主动感知,因此3D摄像头产业链与传统摄像头产业链相比主要新增加红外光源、红外传感器和光学组件等部分。
通过对已经上市的主流3D摄像头产品进行分析,3D摄像头产业链可以被分为上游、中游和下游。其中,上游企业包括红外传感器、红外光源、光学组件、光学镜头以及 CMOS 图像传感器;中游包括传感器模组、摄像头模组、光源代工、光源检测以及图像算法,下游为终端厂商以及应用。 国际电子商情小编整理了部分TOF供应链情况,具体见表:

