BMI055点击型号即可查看芯片规格书

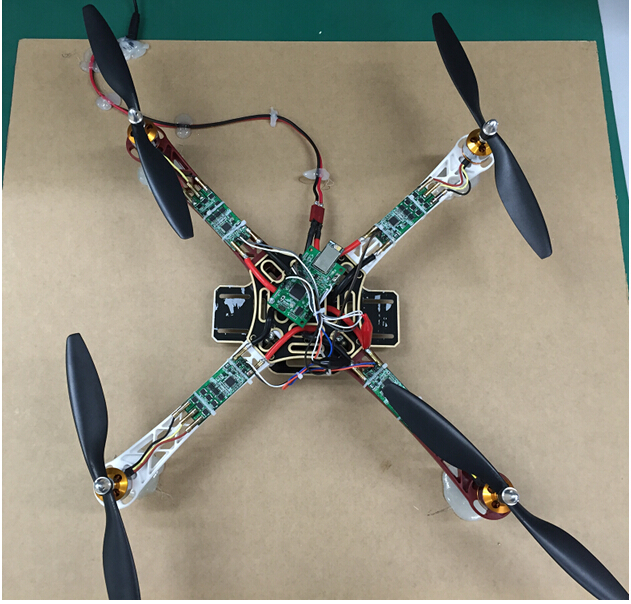
随着科技的发展,无人机技术越来越被重视,并且相对于固定翼无人机,多轴飞行器有着诸多优点:如动力分布,机体质量分布对称,水平面积大,在调整倾角时不会产生平移。 四轴结构决定它能以自身质心为原点,在任意轴旋转,可以实现上升、下降、左旋、右旋、前进、后退、左偏、右偏、悬浮等高难度动作。由于水平结构面积较大,适合安装航拍设备,广泛应用于广泛用于航拍、电影、农业、地产、新闻、消防、救援、能源、遥感测绘、野生动物保护等领域,并不断地融入新的行业应用。
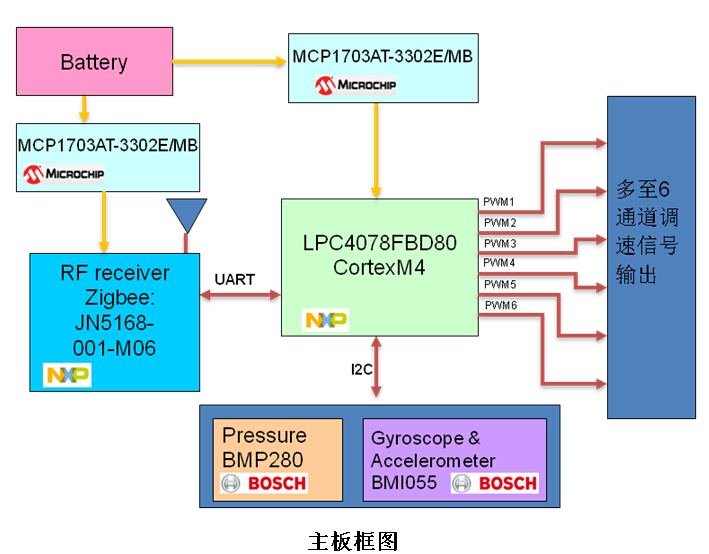
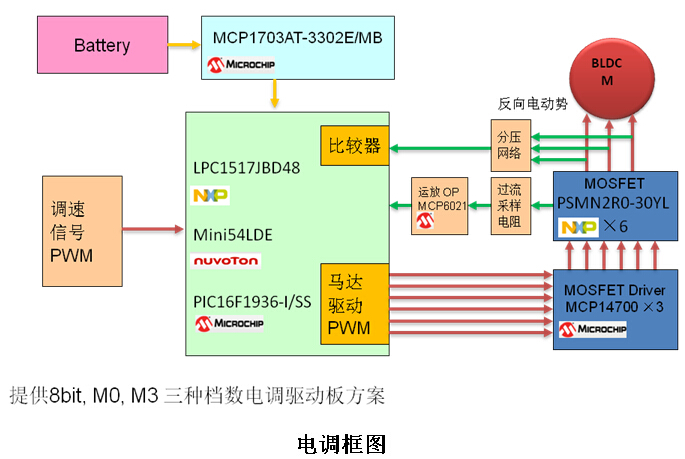
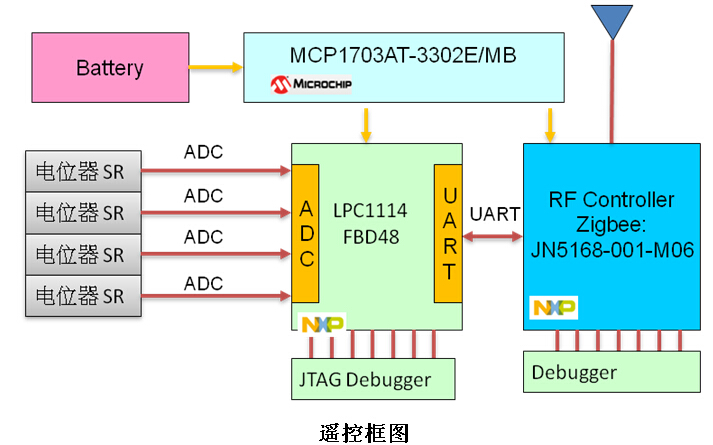
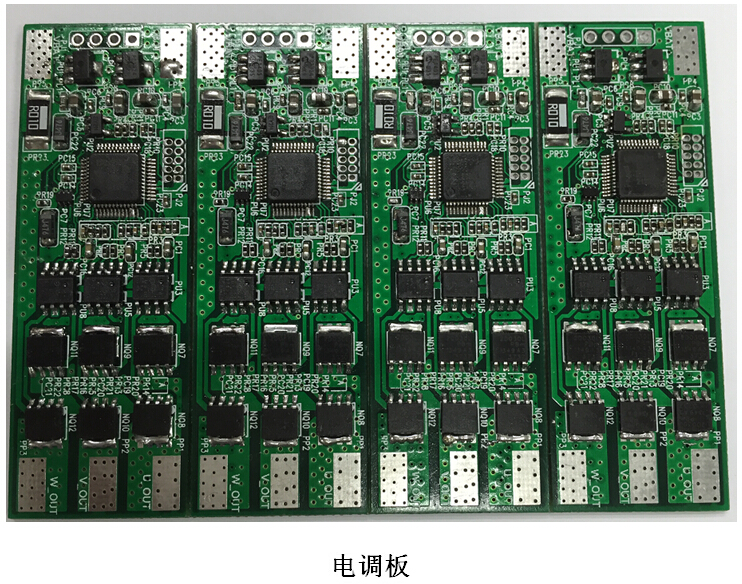
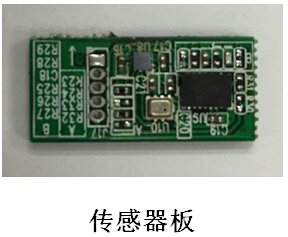
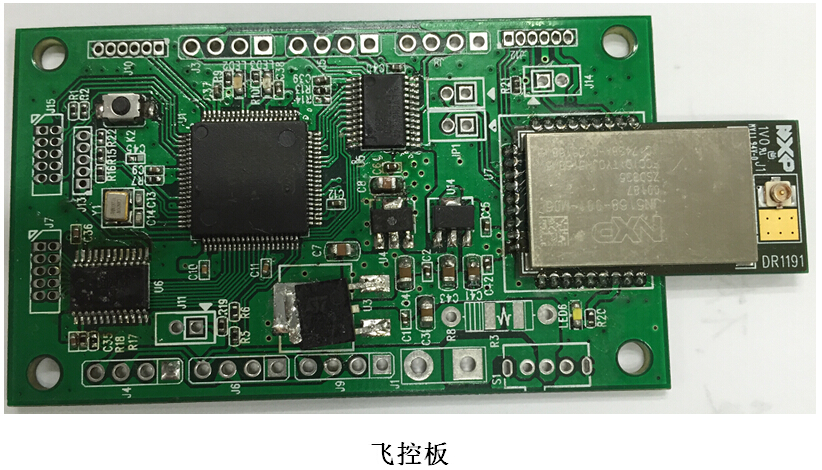
品佳集团提供多轴智慧飞行器软硬件解决方案,飞行器硬件部分包括以下部分:飞控板、遥控板、电调板(ESC)、sensor板,飞控板我们采用了NXP LPC4078 是基于ARM Cortex-M4的内核,主频120MHz,512K Flash作为主控制器,遥控板采用了NXP LPC1114 是基于ARM Cortex-M0的内核,主频50Mhz,32K Flash作为主控器,无线控制采用NXP JN5168 带功放距离到达6公里,电调(ESC)采用了三种方案分别是Microchip PIC16F1938,Nuvoton Mini54,NXP LPC1517,Sensor板采用了BOSH BMI055 6轴陀螺仪,BMM150 地磁传感器,BMP280气压传感器。软件方面我们提供开源的KK或者德国 MK飞控作为参考。
起飞重量:3kg 负载能力:1kg 遥控距离:2km(加功放可扩展到6km) 续航时间:10min 飞行高度:1000m 悬停精度(GPS模式):垂直方向±0.5m,水平方向±2m 最大倾斜角度:35º 最大尾舵角速度:150º/s 抗风能力:<8m/s(17.9mph/28.8km/h) 最大升降速度:±6m/s
① 无线控制采用 NXP JN5168 Zigbee模块进行远程控制 ② 飞控采用LPC4078 Cortex-M4工作频率高达120 MHz,具有512 KB闪存、96 KB SRM ③ 电调采用了3个品牌方案:Microchip PIC16F1936-I/SS\Nuvoton Mini54\ NXP LPC1517 ④ 遥控器采用了NXP LPC1114 ARM Cortex-M0 低功耗MCU ⑤ Sensor采用了BOSCH 陀螺仪BMI055 气压计 BMP280 地磁/电子罗盘 BMM150
原文作者:S的深V
