MCU点击型号即可查看芯片规格书

四轴飞行器是一种有四个螺旋桨且螺旋桨呈十字形布局的小型飞行器,属于多旋翼飞行器中最基本的一种。四轴飞行器具有可靠的稳定性,在复杂、危险的环境下可完成特定的飞行任务。它的应用十分广泛,可用于救援物资投放、航拍,桥梁检测,定点巡航等应用,具有不可估量的市场潜力。
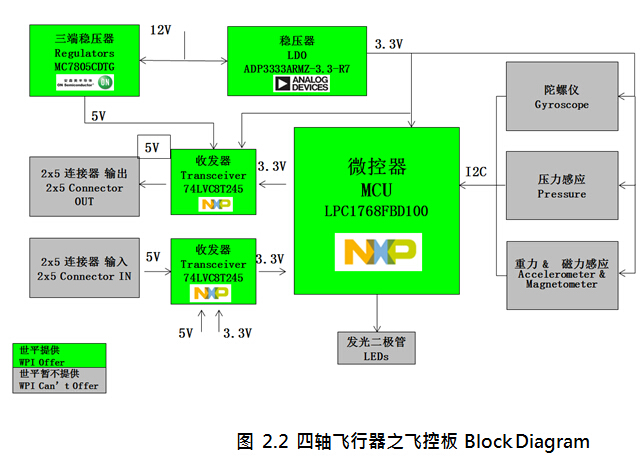
四轴飞行器的飞控 MCU 由于需要处理的数据较多,而且还有复杂的控制算法,对 MCU 性能要求较高,LPC1768FBD100 是 NXP 推出的一种适合嵌入式应用的 Cortex-M3 微控制器,具有高集成度和低功耗的特点,运行频率为 100 MHz,可以完美的完成四轴飞行器复杂的功能需求和精准的控制。LPC1768FBD100 有三个增强型 I2C 总线接口、八通道通用 DMA 控制器、四个通用定时器,而且总线接口资源丰富,适用于要接入所有数据的飞控 MCU,且封装采用 TQFP 100,体积小更适用于飞行器。
世平集团于 2014 年 9 月推出基于 NXP LPC1768FBD100 的四轴飞行器解决方案。采用 Zigbee 远程遥控方式,控制范围可达 500m 以上。飞行器配备陀螺仪、重力、压力、磁力传感器,可测量飞行器的姿态角和速度数据,再利用高性能微处理器对数据做出分析,从而控制马达的电子调速器的反馈运动,使飞行器可以平稳地在空中飞行。

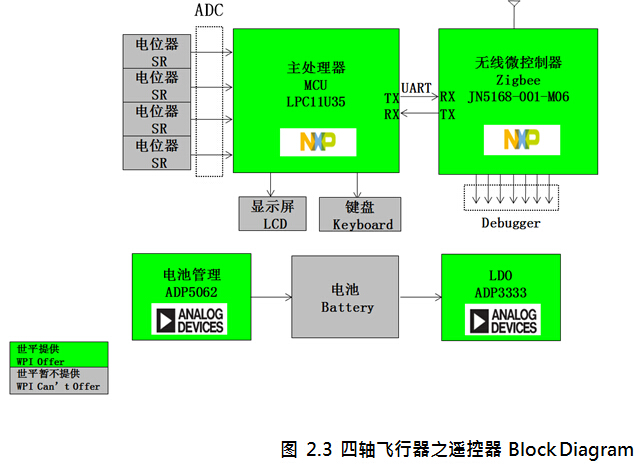
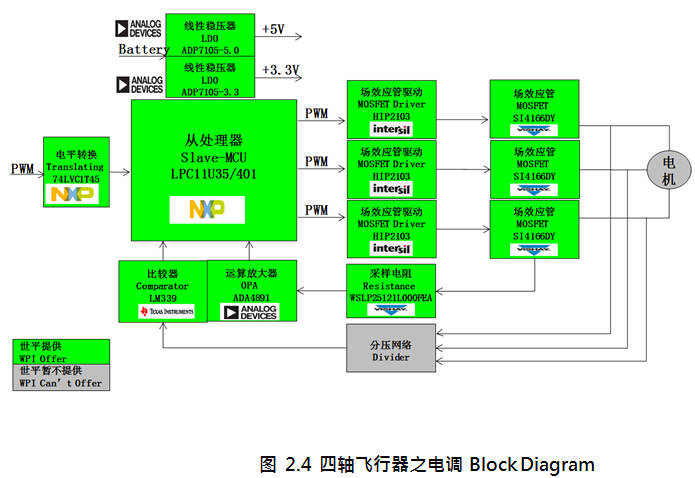

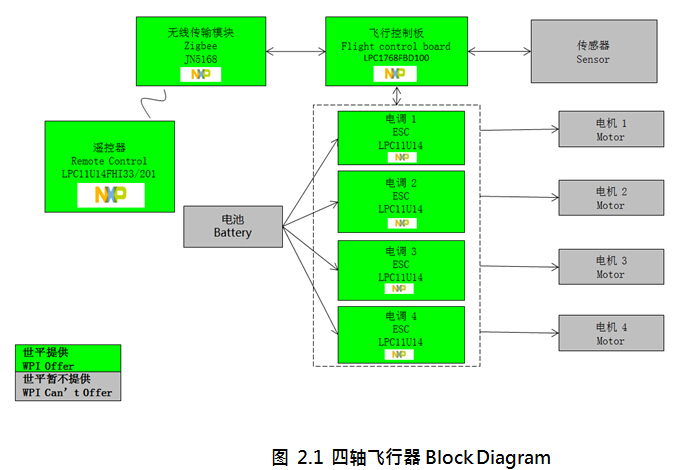
① Zigbee 远程遥控: 本方案的遥控器采用基于 ZigBee RF4CE 协议的新型航模遥控器,带有 PA,传输范围可达 1~2km。 ② 飞行控制: 本方案中的飞控板可应用 4~6 轴飞行器机身控制,可以控制飞行器前后、左右、旋转,并可支持其他品牌的无线接收、电调。 ③ 调节 BLDC 转速: 本方案中的电调板可通过检测反动电动势的方式启动 BLDC,MCU 产生不同占空比的 PWM 控制转速。
① 本方案遥控器是 IEEE802.15.4 兼容无线电收发器,采用 NXP LPU11U35 为主芯片,增强型 32 位 RISC 处理器,单芯片可以实现航模遥控接收,可以直接输出 16 位精度的 PWM 信号 ② 本方案飞控板采用 NXP LPC1768FBD100 为主芯片,100M Cotex-M4 处理低功耗MCU,90uA/Mhz,50Hz PWM 无线接收控制和 500Khz PWM 控制航模电调 ③ 本方案电调采用 NXP LPU11U35/401 为主芯片,50M Cotex-M0 处理低功耗 MCU,支持 500Khz PWM 控制,最大可驱动 20A BLDC 电机
原文作者:S的深V
