智慧多足机器人是当前研究的热点,六爪机器人可用于矿灾、震灾后极端环境下的探测搜救。可通过狭小空间,通过人机交互控制实现复杂地矿地貌环境下的时空信息获取,探测生命迹象,争取救援时间,提高援救效率。
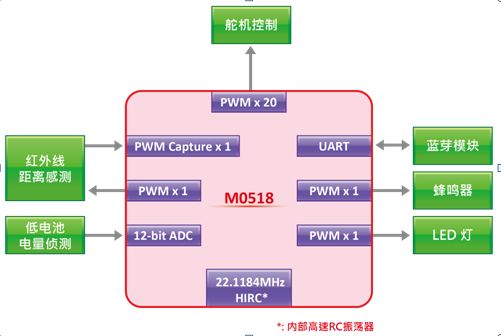
Nuvoton推出基于M0518的六爪机器人解决方案。该方案以M0518单片机作为核心控制器,接收来自安卓手机终端的数据,控制24路舵机的快速平稳运行,实现六足机器人运动。当机器人处于自动避障模式时,单片机将通过红外模块完成前方障碍物距离检测。同时,单片机利用内部ADC模块实时检测电池电量,当电压低于最小工作电压时,蜂鸣器发出滴答报警信号,机器人此次将停止动作。
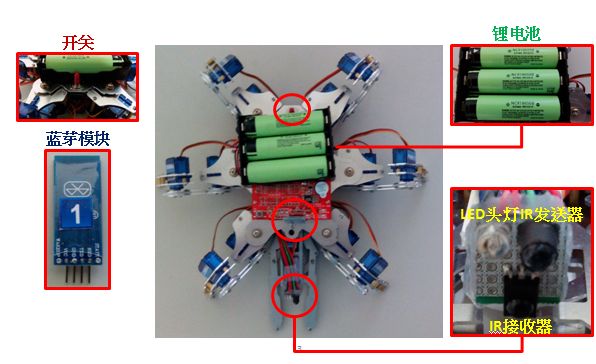
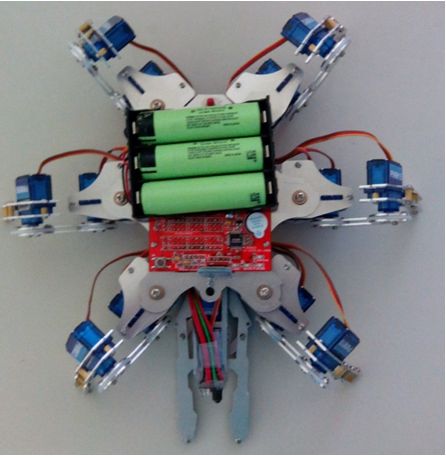
(1)机器人共有六根爪子,每根爪子有3个关节,共有18个自由度,可以完成前进、后退、左右移动、转弯、跳舞等等各式各样的动作。 (2)当前方具有障碍物,可以通过红外检测,并做出规避动作。 (3)可以实时监测电量,电池电量过低,蜂鸣器响起。 (4)可以和手机通过蓝牙连接,进行远程遥控。
• 新唐 NuMicro ARM Cortex-M0 系列,可支持宽工作电压2.5~5.5V。 • 支持24路16位PWM输出或是捕捉输入,频率最高可以达到100MHz。 • 支持6组UART可以和24路PWM同时使用,FIFO深度16 bytes。 • 高速12-bit ADC,达1MSPS。 • 内建22.1184MHz高速时钟源,精度达1% (25 ℃,Vdd 5V)。 • LQFP64 封装支持最多56根GPIO管脚。 • NuMicro特有加密及程序保护,保障程序不被盗取。
原文作者:S的深V
