L6919E点击型号即可查看芯片规格书
输出电容器
由于微处理器在进行负载瞬变时要求电流变化超过50A,并且输出电容器是电源快速响应的基本元件。由于负载瞬态响应更快,双相拓扑减少了所需的输出电容量(负载连接处的开关频率加倍)。180°相移引起的电流纹波消除在两个相位之间也降低了对输出ESR的要求,以维持指定的电压纹波。当负载瞬变作用于转换器的输出时,在最初的几微秒内,负载的电流由输出电容器提供。控制器立即识别负载瞬态并增加负载周期,但电流斜率受电感值的限制。由于电容器内部的电流变化(忽略ESL):∆VOUT=∆IOUT·ESR
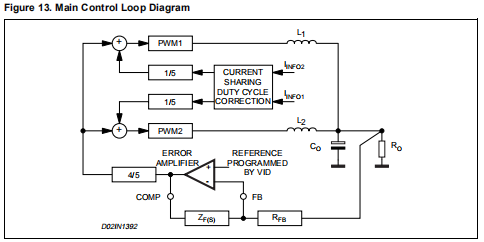
在负载瞬态期间,需要一个最小的电容值来维持电流而不放电。这个输出电容器放电引起的电压降可通过以下公式得出:

其中,DMAX是最大占空比值。ESR越低,负载时的输出降越低瞬态和较低的是输出电压的静态纹波。
电感器设计
电感值由瞬态响应时间、效率和成本之间的折衷来定义还有尺寸。必须计算电感器以维持输出,并维持输入电压变化纹波电流∆IL在最大输出电流的20%和30%之间。电感值可通过以下关系式计算:
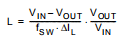
其中fSW是开关频率,VIN是输入电压,VOUT是输出电压。增加电感值会降低纹波电流,但同时也会降低转换器负载瞬态响应时间。响应时间是电感器改变电流所需的时间从初始值到最终值。由于电感器尚未完成充电时间,输出电流由输出电容器。最小化响应时间可以最小化所需的输出电容。负载瞬态的响应时间因负载的应用或移除而不同:如果在负载施加期间,电感器被等于输入和输出之间差的电压充电电压,在拆卸过程中,它只由输出电压放电。以下表达式给出了补偿网络响应足够快的情况下∆I负载瞬态的近似响应时间:

最坏的情况取决于可用的输入电压和选定的输出电压。不管怎样,最坏的case是负载移除后的响应时间,最小输出电压已编程,最大输入电压可用。
主控制回路
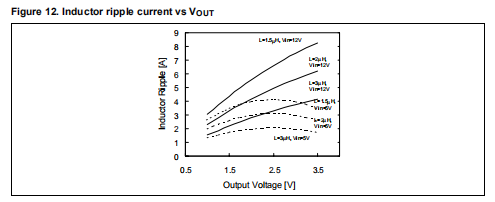
控制回路由均流控制回路和平均电流模式控制回路组成。每个回路在适当增益的情况下,对PWM进行校正,以将其调节误差降至最低:均流控制回路均衡电感电流,平均电流模式控制环路固定输出电压等于VID编程的参考电压。图13报告了主控制回路。
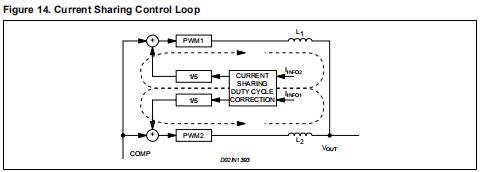
均流(CS)控制回路
有源均流是利用变压器电导差分放大器的信息来实现的平均电流模式控制方案。内置一个等于读取电流平均值(IAVG)的电流基准;读取电流和该基准之间的误差被转换成具有适当增益的电压用于调整占空比,其主导值由补偿引脚处的误差放大器设定(见图14)。均流控制是一个高带宽的控制回路,即使在负载瞬变期间也允许均流。均流误差受外部元件选择的影响;选用精密Rg电阻(±1%为必要的)感应电流。均流误差内部受变压器电压偏移的控制电导差分放大器;考虑到通过感测电阻的电压偏移等于2毫伏,电流读数误差由下式给出:
式中∆IREAD是单相电流和理想电流之间的差(IMAX/2)。对于RSENSE=4mΩ和IMAX=40A,均流误差等于2.5%,忽略由Rg和Rsense不匹配。
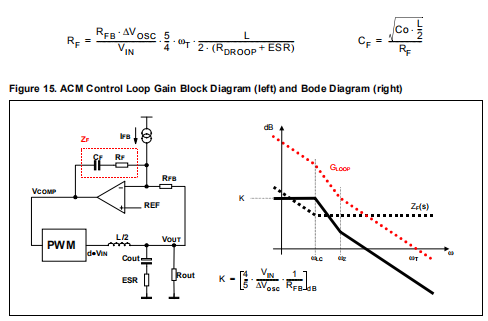
ACM控制回路增益设计为获得高直流增益,以最大限度地减少静态误差并跨越0dB轴当斜率为-20dB/dec,期望的交叉频率为ωT。忽略ZF(s)的影响,则传递函数有一个零极点和两个极点。一旦设计了输出滤波器,两个极点都是固定的零由ESR和下垂电阻确定。为了获得所需的形状,ZF(s)实现考虑了RF-CF系列网络。零度然后引入ωF=1/RFCF和积分器。这种积分器在放置时最大限度地减少了静态误差与L-C共振相对应的零点是-20dB/dec的简单增益形状(见图15) 一。事实上,考虑到输出滤波器的通常值,LC谐振的结果是在较低的频率比上面报道的要多零。补偿网络可以简单地设计成ωZ=ωLC并施加期望的交叉频率ωT:
布局指南
由于设备管理控制功能和大电流驱动器,布局是最重要的事情之一在设计这种大电流应用时要考虑。一个好的布局方案可以降低功率路径上的功耗,减小半径,信号和电源地之间的适当连接可以优化控制性能循环。集成电源驱动器减少了组件数量,并减少了控制功能和驱动器之间的互连,减少电路板空间。下面列出了开始新布局时要关注的要点,并建议了相应的实现规则。电源连接。电流从输入端持续流向负载。放置组件时的第一要务必须保留给该电源段,以尽量减少每个连接尽可能多。为了最小化噪声和电压尖峰(EMI和损耗),这些互连必须是电源平面的一部分不管怎么说,都是通过宽厚的铜痕迹来实现的。关键部件,即功率晶体管,必须尽可能靠近控制器。考虑到图中报告的“电气”部件由一个以上的“物理”部件组成,建议采用接地平面或“星形”接地连接,以尽量减少多重连接造成的影响。
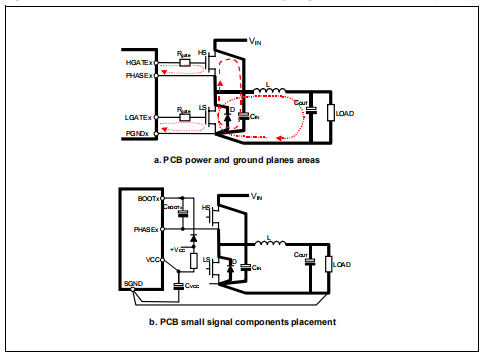
图16a示出所涉及的电源连接和电流回路的细节。输入电容(CIN)
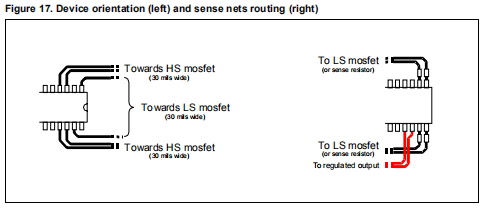
或者至少需要总电容的一部分,必须放在靠近功率段的地方,以便消除铜迹线产生的杂散电感。需要低ESR和ESL电容器。相关电源连接。图16b显示了一些小信号分量的放置,以及如何和在哪里混合信号和电源地飞机。驱动器和mosfet栅极之间的距离应尽可能缩短。传播延迟沿铜线分布的电感所产生的电压尖峰的次数和最小化。事实上,mosfet离器件越远,互连栅极轨迹越长,作为一个连续序列,对应于栅极PWM上升和下降信号的电压尖峰就越高。即使这些尖峰被固有的内部二极管钳制,传播延迟,噪声和不稳定的潜在原因被引入危害良好的系统行为。一个重要的后果是高边mosfet的损耗显著增加。因此,建议将驱动侧朝向MOSFET和GATEx和PHASEx轨迹一起走向高侧mosfet,以最小化距离(参见图17) 一。此外,由于PHASEx引脚是高压侧驱动器的返回路径,因此必须连接该引脚直接到高压侧的mosfet源引脚有一个适当的驱动这个mosfet。对于LS MOSFET,返回路径是PGND引脚:它可以直接连接到电源接地层(如果实现)或以与LS mosfets源引脚相同的方式。GATEx和PHASEx连接(以及当没有电源接地平面时,PGND)也必须设计为处理过大的电流峰值2A(建议宽度为30密耳)。几欧姆的栅极电阻有助于在不损害系统的情况下降低集成电路的功耗效率。
其他组件的放置也很重要:
–引导电容器必须尽可能靠近BOOTx和PHASEx引脚,以缩小所创建的回路。
–将Vcc和SGND的去耦电容器放置在尽可能靠近相关引脚的位置。
–将电容器从VCCDR和PGND上分离,并尽可能靠近这些引脚。这个电容器维持低侧mosfet驱动器所需的峰值电流。
–参考SGND所有敏感元件,如频率设置电阻器(如有)以及从FB到GND的可选电阻器,用于提供正的降速效果。
–将SGND连接到负载侧的PGND(输出电容器),以避免不良的负载调节效果在不使用遥测缓冲器的情况下,保证调节精度正确。
–建议在HS mosfet漏极附近放置额外的100nF陶瓷电容器。有助于减少噪音。
–相位引脚尖峰。由于HS-mosfet开关处于硬模式,可以观察到高电压尖峰
在相位引脚上。如果这些电压尖峰超过了引脚的最大击穿电压,那么设备可以吸收能量,也会造成伤害。电压尖峰必须受到适当布局的限制使用栅极电阻、肖特基二极管并联于低压侧MOSFET和/或缓冲网络低侧MOSFET,在最大600kHz的FSW下,20nSec的值低于26V。
电流感应连接
远程缓冲区:该组件的输入连接必须作为平行网络从FBG/FBR路由为了补偿沿输出功率轨迹的损耗,同时也避免了拾取任何共模噪声。将这些引脚连接在远离负载的点上,将导致非最佳负载调节,增加输出公差。
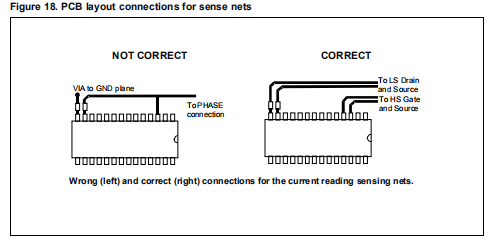
电流读数:Rg电阻器必须尽可能靠近ISENx和PGNDSx引脚以限制注入设备的噪声。PCB线路将这些电阻连接到读取点必须作为平行记录道进行布线,以避免拾取任何共模噪声。这也很重要为了避免测量中的任何偏移,并获得更好的精度,应尽可能靠近迹线对于感测元件,专用电流感测电阻或低侧mosfet RdsON。此外,当使用低侧mosfet RdsON作为电流检测元件时,ISENx引脚实际上连接到PHASEx引脚。不要将引脚连接在一起,然后再连接到HS源!由于高压侧驱动器返回时产生的噪音,设备无法正常工作。在这种情况下路由两个独立的网络:将PHASEx引脚连接到HS源(与HGATEx一起路由),并净(30密耳)和ISENx销至LS排水管(与PGNDSx一起布线)。此外,PGNDSx引脚始终通过Rg电阻器连接到PGND:不要直接连接到PGND!在这种情况下,设备不能正常工作。无论如何都要路由到LS mosfet源(与ISENx网络一起)。正确和错误的连接如图18所示。为了避免变换器两相之间的不平衡,还建议对称布置。
演示板说明
L6919E演示板显示了设备在双相应用中的操作。这个评估委员会允许通过开关S0-S4调节输出电压(0.800V-1.550V)和高输出电流容量。该电路板的布局可以使用最多两个D2低场效应晶体管侧装开关在选择mosfet时给予最大的灵活性。考虑到以下因素,四层演示板的铜厚度为70μm,以尽量减少传导损耗电路能够传输的高电流。演示板原理电路如图19所示。
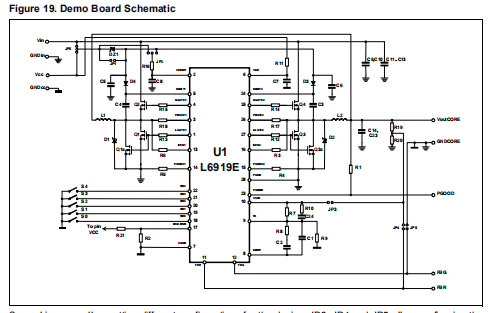
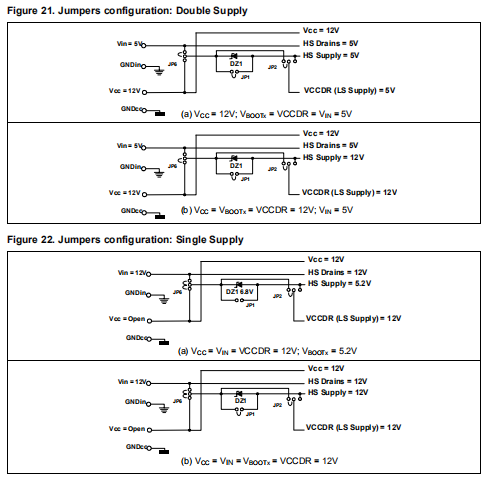
多个跳线允许为设备设置不同的配置:JP3、JP4和JP5允许配置远程缓冲区。JP5只是启动了JP5,并使输出短路板上电压;要实现真正的远程感测,保持这些跳线断开并连接FBG和FBR演示板上的连接器连接到远程负载。为了避免使用远程缓冲,只需短接所有跳线JP3、JP4和JP5。通过R7的局部感知用于调节。可以使用跳线JP1、JP2和JP6以不同的方式配置输入;这些跳线也可以控制mosfet驱动电源电压。总之,电源转换从VIN开始,设备由VCC供电(见图20)。
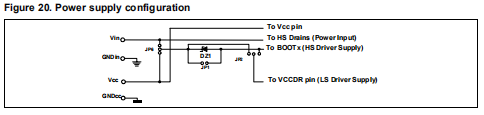
可区分两种主要配置:单电源(VCC=VIN=12V)和双电源(VCC=12V)VIN=5V或不同)。
–单电源:在这种情况下,JP6必须完全短路。该装置配有相同的导轨用于转换的。使用额外的齐纳二极管DZ1,可以得到较低的电压如果mosfet是mosfet的逻辑驱动器,则使用它。在这种情况下,JP1必须保持打开,以便HS驱动器通过BOOTx提供VIN-VDZ1,JP2必须短接到左侧才能使用VIN或使用VIN-VDZ1通过VCCDR引脚向LS驱动器供电的权利。否则,JP1必须短接JP2可以在这两个位置之一自由做空。
–双电源:在这种情况下,VCC直接向控制器(12V)供电,而VIN为HS排水管供电用于功率转换。最后一个可以从5V总线(典型)或其他总线无差别地启动允许最大的灵活性在功率转换。mosfet驱动器的电源可以编程如前所示,通过JP1、JP2和JP6跳线。JP6现在选择VCC或VIN关于要求。下面的图21和22报告了一些示例