1、特点
3V至5.5V VCC范围
最小输出电压低至0.6伏
1V至35V输入电压范围
恒定准时拓扑
快速负载瞬变
0.6V,±1%VREF
可选下沉模式
无损电流限制,可用也处于下沉模式
遥感
OVP、UVP闭锁保护
600μA典型静态电流
电源良好和OVP信号
轻负载下的脉冲跳跃
从3.3V到2.5V的效率为94%
2、应用
网络
直流/直流模块
分布式电源
移动应用
芯片组、CPU、DSP和存储器
供应
3、说明
该设备是一种高效的联网解决方案dc/dc模块和移动应用程序兼容带3.3V母线和5V母线。它能够调节低至0.6伏的输出电压。恒定的准时拓扑确保快速的负载传输响应。嵌入式电压前馈提供几乎恒定的开关频率操作,尽管输入电压范围很宽。在控制回路中可以引入积分器减小静态输出电压误差。遥感提高了静态和动态性能调节,恢复导线电压降。脉冲跳变技术降低了轻负载下的功耗。驾驶员当前能力允许输出电流超过20A。
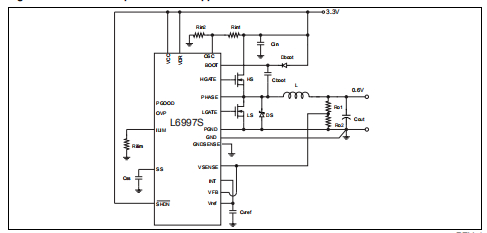
表5。电气特性
(VCC=VDR=3.3V;环境温度=0°C至85°C,除非另有规定)
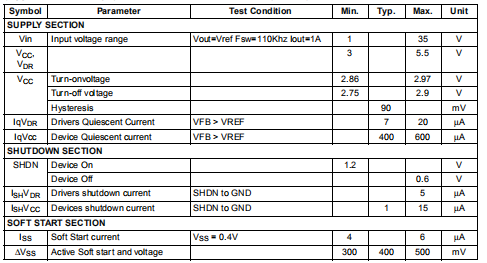
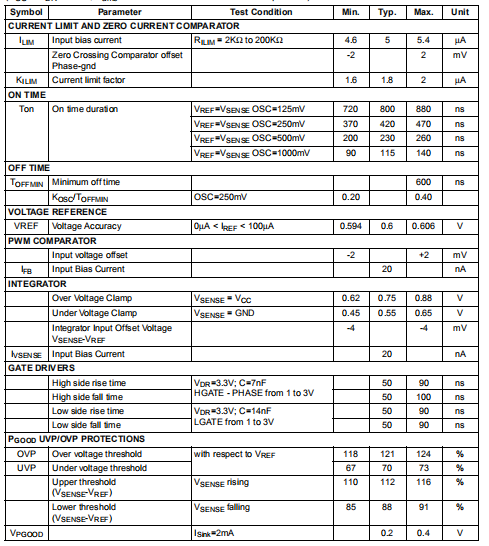
表5。电气特性(续)
(VCC=VDR=3.3V;环境温度=0°C至85°C,除非另有规定)
设备说明
恒定导通时间PWM拓扑
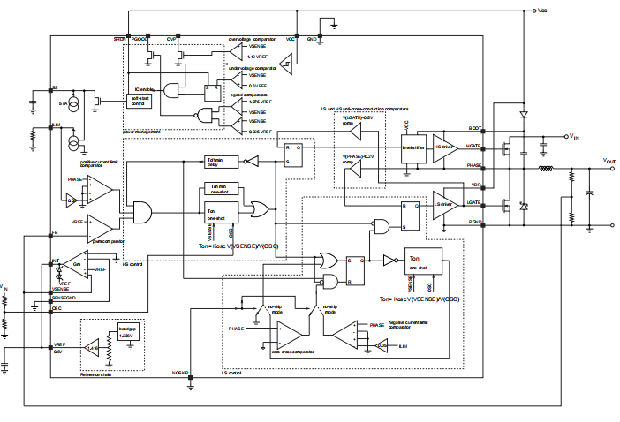
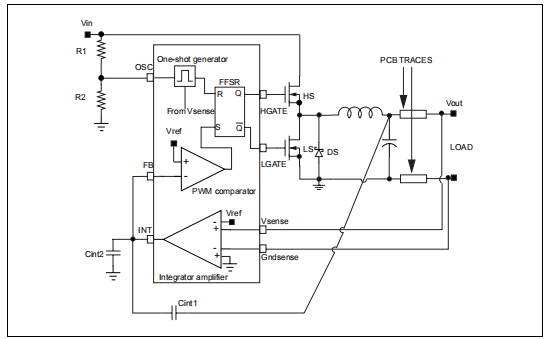
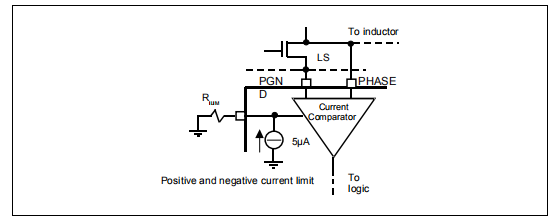
图5。回路框图
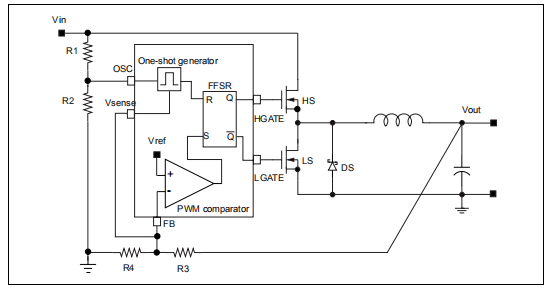
该器件实现了一种恒定导通时间控制方案,其中Ton是高边MOSFET的导通时间由一次性生成器强制的持续时间。接通时间与VSENSE引脚电压成正比,与OSC引脚电压成反比,如Eq1:
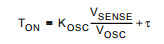
式中,KOSC=180ns,τ是内部传播延迟时间(典型值。40纳秒)。系统稳定地施加压力说明与VOSC=1V相对应的最小接通时间。事实上,如果VOSC电压增加到1V以上,响应时间不会降低。将OSC引脚连接到从VIN到GND的电压分区,它允许与车辆识别号无关的稳态开关频率FSW。结果是: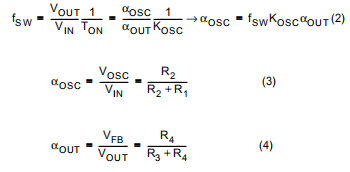
上述公式允许在设定输出电压后设置分频比αOSC;注只有当VOSC<1V时,这些方程才成立。此外,Eq2还说明了系统如何具有理想地独立于输入电压的开关频率。延迟引入了与车辆识别号(VIN)相关的光。为了保证启动电容器充电和限制负载瞬态后的开关频率,以及屏蔽PWM比较器输出噪音和尖峰。系统没有内部时钟,因为这是一个迟滞控制器,所以如果三个开启脉冲就会启动同时满足条件:FB引脚电压低于参考电压,最小关断时间通过,电流限制比较器未触发(即,电感器电流低于电流限制值)。OSC引脚处的电压必须在50mV和1V之间,以确保系统线性。
闭合回路
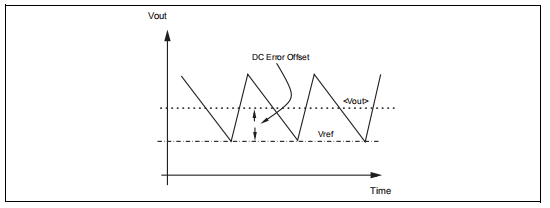
回路闭合,将输出电压(或输出分压器中点)连接至FB引脚。FB引脚内部连接到比较器负极引脚,而正极引脚连接到参考电压(0.6V典型值)如图5所示。当FB低于参考电压时,PWM比较器输出变高并设置触发器输出,打开高侧MOSFET。这种情况被锁定以避免噪音。在接通时间(如前一节所述计算)后,系统复位触发器,转向关闭高侧MOSFET,打开低侧MOSFET。有关更多详细信息,请参阅图4。连接输出电容器和负载的接地和供电金属路径上的电压降是直流电错误。此外,系统调节输出电压谷值而不是平均值,如图6所示。因此,输出电容器上的电压纹波是直流静态误差(以及PCB轨迹)的来源。为了补偿直流误差,必须通过连接输出在控制回路中引入积分器网络电压通过电容器传到INT引脚,FB引脚直接连接到INT引脚,如图7所示。内部积分放大器和外部电容器CINT1在控制回路中引入一个直流极。CINT1还提供输出纹波的交流路径。
积分器放大器产生与直流误差成比例的电流,增加输出电容以补偿总静态误差。装置内的电压钳迫使管脚产生一个内电压量程(VREF-50mV,VREF+150mV)。这有助于避免或平滑负载期间的输出电压过冲暂时的。同时,这意味着积分器能够在稳态下恢复由于纹波而引起的输出误差,当其峰值-峰值振幅小于150mV时。当纹波振幅大于150mV时,可在INT引脚和接地以减小INT引脚处的纹波振幅,否则积分器将在其线性范围之外工作。选择CINT1根据以下方程式:
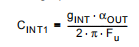
其中gINT=50μs是积分器跨导,αOUT是Eq4给出的输出分频比,FU是闭环带宽。如果CINT2连接在INT引脚和接地之间,则该等式成立。给出CINT2通过: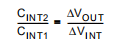
其中∆VOUT是输出纹波,∆VINT是INT引脚(100mV典型值)处所需的纹波。
对于传统的PWM控制器,它有一个内部振荡器来设置开关频率,在物理系统中,频率可以随着某些参数的变化而变化。例如,在标准固定开关频率拓扑中,损耗的增加(例如增加输出电流)会产生开关时间的变化,在固定的接通时间拓扑中,损耗的增加只会产生关断时间的变化,改变开关频率。该装置采用电压前馈电路,使开关频率在稳态工作时保持恒定,且在输入范围内变化。在稳态运行中,影响开关频率精度的因素很多。其中一些是内部死区,这取决于高侧MOSFET驱动器。其他与外部元件如高侧MOSFET栅电荷和栅电阻,电源电压下降和接地轨,低压侧和高压侧RDSON和电感器寄生电阻。在正负载瞬态期间(输出电流增加),转换器以其最大频率切换(周期为TON+TOFFmin)恢复输出电压降。在负负载瞬态期间电流降低),设备停止切换(高压侧MOSFET保持关闭)。
从PWM到PFM/PSK的转换
为了在轻负载条件下实现高效率,提供了PFM模式。PFM模式与PWM不同模式基本上是关相;开相是相同的。在PFM中,在接通循环后,系统接通低边MOSFET直到电感电流降到零,当过零比较器关闭低侧MOSFET。在PWM模式下,在通电周期之后,系统将低侧MOSFET保持在接通状态,直到下一个接通周期,因此存储在输出电容器中的能量将通过低压侧MOSFET流到地上。这个PFM模式自然地在滞后控制器中实现,通过开启零电流比较器,实际上在PFM模式下,系统用比较器读取输出电压,然后打开高电平当输出电压下降到参考值时,侧面MOSFET。该装置以间断模式工作轻载和高载连续工作模式。当负载电流为大约一半的电感器电流纹波。此阈值取决于VIN、L和VOUT。请注意,越高电感值越大,阈值越小。另一方面,电感值越大,速度越慢瞬态响应为。PFM波形可能比正常操作更具噪声和异步性,但这是正常现象,主要是由于负载非常低。如果PFM与应用程序不兼容,则可以禁用与VCC的NOSKIP引脚接。
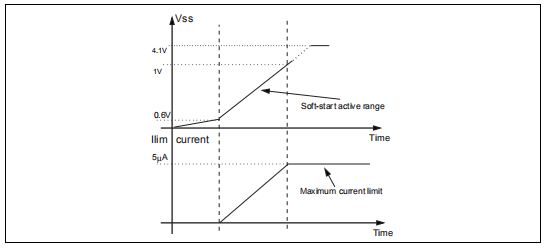
软启动
在设备打开后,SS引脚电压开始增加,系统开始切换。软启动是通过逐步提高限流阈值来避免输出过电压来实现的。主动软启动VSS电压范围(输出电流限制线性增加)为0.6V到1V。在此范围内内部电流源(5μA典型值)为SS引脚上的电容器充电;参考电流(用于电流限制比较器)强制通过ILIM引脚与SS引脚电压成比例,在5μA(典型值)下饱和。当SS电压接近1V最大电流限制激活。输出保护OVP和UVP被禁用,直到SS引脚电压达到1V(见图8)。一旦SS引脚电压达到1V值,SS引脚上的电压不再影响系统的运行。如果SHDN引脚在电源之前打开,电源部分必须在逻辑之前打开第节。如果电源在SHND引脚断开的情况下应用,则启动顺序不计时。
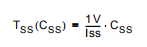
由于该系统是通过控制电感电流来实现软启动的,所以软启动电容器应该根据输出电容、电流限制和软启动有效范围(∆VSS)进行选择。为了选择软启动电容器,必须使输出电压达到最终值软起动电压达到欠压值(1V)。在这个UVP和OVP被启用之后。将SS电容器充电至1V所需的时间由以下公式给出:
为了计算输出电压充电时间,应考虑电感电流函数可以假设为时间的线性函数。
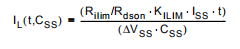
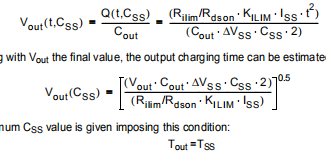
因此,考虑到输出负载为零,输出电压为:
电流限制
电流限制比较器通过低侧MOSFET RDSON压降感测电感电流,并将该值与ILIM引脚电压值进行比较。当电流高于电流限制值时,控件
抑制高侧MOSFET的开启。要正确设置电流限制阈值,应注意这是谷电流限制。平均电流取决于电感值、VIN VOUT和开关频率。电流限制中的平均输出电流由下式得出:
因此,要设置当前阈值,请根据以下公式选择RILIM:
在过电流条件下,系统保持电流恒定,直到输出电压满足欠压门槛。对于sink模式,负谷电流限值自动设置为与正谷电流限值相同的值。平均负电流限值与正平均电流限值的不同之处在于纹波电流;这种差异是由于谷值控制技术造成的。限流系统精度是连接到ILIM引脚和低边MOSFET的RDSON精度。此外,ILIM引脚上的电压必须在10mV和1V之间以保证系统的线性度。
保护和故障
负载保护是利用VSENSE引脚实现的。OVP和UVP都锁定,并且故障状态由PGOOD和OVP引脚指示。如果输出电压在89%(典型值)和110%(典型值)之间在规定值中,PGOOD较高。如果发生硬过电压或欠电压,则装置被锁定:低侧MOSFET和高侧MOSFET关闭,PGOOD变低。如果系统检测到过电压OVP引脚高。要恢复功能,必须关闭设备并重新启动SHDN引脚,或者通过卸下电源,然后按照正确的顺序重新启动设备。
集成的大电流驱动器允许使用不同尺寸的功率MOSFET,保持快速开关变换。高压侧MOSFET的驱动器使用启动引脚供电,相位引脚用于返回(浮动驾驶员)。低端MOSFET的驱动器使用VDR引脚作为电源,PGND引脚用于回路。这个驾驶员具有自适应的抗交叉传导保护,可防止高侧和低侧侧边MOSFET同时接通,避免了从VIN到GND的高电流。当高侧MOSFET关闭时,相引脚上的电压开始下降;只有当相引脚上的电压达到250毫伏时,低侧MOSFET才被打开。当低压侧关闭时,高压侧保持关闭,直到LGATE引脚电压达到500毫伏。这一点很重要,因为驱动器可以与大范围的外部功率MOS fet正常工作。开关外部MOSFET所需的电流流过器件,它与MOSFET栅对开关频率和驱动电压进行充电。所以设备的功耗是外部功率MOSFET栅极电荷和开关频率的函数。

低压侧和高压侧的最大栅电荷值由下式给出:
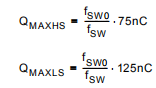
其中fSW0=500Khz。上述方程式适用于TJ=150°C。如果系统温度较低,则QG可以更高。对于低侧驱动器,由于内部轨迹退化,最大输出门电荷满足另一个极限;在这种情况下,最大值为QMAXLS=125nC。低侧驱动器被设计成有一个低电阻下拉晶体管,大约0.5欧姆。这可以防止在引脚相位的快速上升时间内,由于米勒效应而意外地开启LS-MOSFET。当使用3.3V总线为驱动器供电时,应选择超逻辑级MOSFET确保MOSFET工作正常。
申请信息
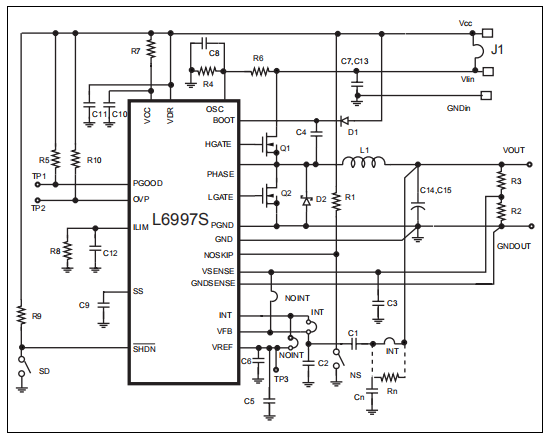
5A演示板说明
演示板显示了这种情况下的设备操作:VIN从3.3V到5V,IOUT=5A VOUT=1.25V评估板允许使用2种不同电压的系统(VCC为IC供电,VIN为电源输入所以更换输入电容器时,电源输入电压也可以是35V输入电压(VIN)等于VCC,最好将其与10Ω电阻器连接,以便过滤设备输入电压。在平台上部演示中有两个不同的跳线:一个跳线,靠近OVP和POW ER GOOD测试点,用于关闭设备;当跳线出现时,设备处于关闭状态模式,要运行设备,请移除跳线。另一根跨接导线靠近VREF测试点,用于设置PFM/PSK模式。当跳线存在时,轻载时,系统将进入PFM模式;如果没有跳线,轻载时,系统将保持PWM模式。在演示的底部有两个不同的跳跃者。它们用于设置或删除积分器配置。当用INT标签命名的跳线闭合,且带有NOINT标签的跳线打开,设置了积分器配置。有时积分器配置需要低频滤波器来减少噪声干扰。在这种情况下取而代之的是闭合INT跳线,在那里放一个电阻,然后电容器接地(如示意图所示);极值约为500Khz,但应高于开关频率(十倍)。打开当以NOINT命名的跳线闭合,而以INT命名的跳线打开时,则相反选择非积分器配置。关于跨接导线连接,请参阅表1和表2。