工作电源IC电压为5V
至12V母线
高达1.3A栅电流能力
TTL兼容5位可编程
输出符合VRM 9.0:1.100V至1.850V,二进制0.025V
电压模式PWM控制
输出精度高:±1%过线和温度
变化
快速负载瞬态响应:从0%到100%占空比
电源良好输出电压
过压保护和
监视器
实现过电流保护
使用上MOSFET的RdsON
200KHz内部振荡器
外部可调振荡器
从50KHz到1MHz
软启动和抑制功能
应用
高级电源
核心微处理器
分布式电源
大功率DC-DC调节器
说明
该设备是一种电源控制器,专门设计用于为大电流微处理器提供高性能的DC/DC转换。精确的5位数模转换器(DAC)允许调整输出电压从1.30V到2.05V,50mV二进制步进,从2.10V到3.50V,采用100mV二进制步进。高精度的内部基准确保选择的输出电压在±1%以内。高峰当前的门驱动器提供了快速切换到提供低开关损耗的外部功率mos。该装置保证了对负载的快速保护过电流和负载过电压。外部SCR是在发生故障时触发撬开输入电源过电压。还提供了内部撬棍只要检测到过电压,就打开低侧mosfet。如果检测到过电流,软启动电容器放电,系统在打嗝模式下工作。
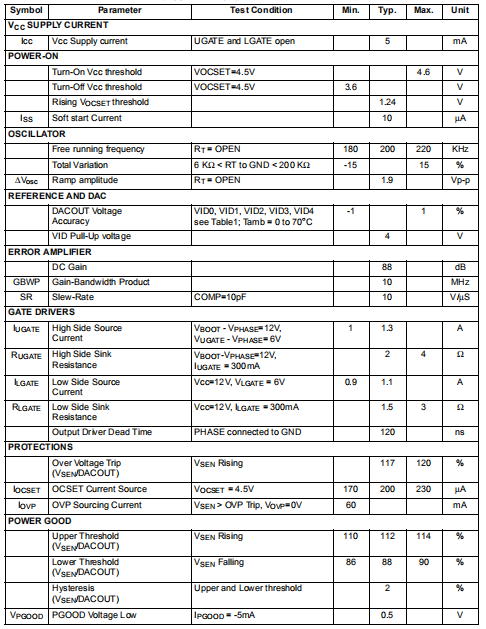
电气特性(VCC=12V,环境温度=25°C,除非另有规定)
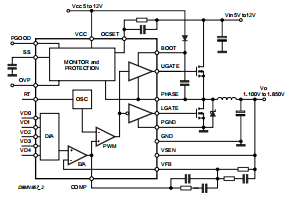
设备说明
该器件是采用BCD技术实现的集成电路。它提供完整的控制逻辑和保护为高性能降压DC-DC转换器优化微处理器电源。它是设计的在同步整流buck拓扑中驱动N沟道mosfet。该装置工作正常,Vcc范围从5V到12V,并从1.26V功率级电源电压(Vin)开始调节输出电压。这个转换器的输出电压可精确调节,可编程VID引脚,从1.100V到1.850V采用25mV二进制步进,温度和线电压变化的最大公差为±1%。这个该装置提供快速瞬态响应的电压模式控制。它包括一个200kHz的自激振荡器从50kHz到1MHz可调。误差放大器具有15MHz的增益带宽乘积和10V/μs的转换率,允许高转换带宽以实现快速瞬态性能。产生的PWM占空比范围为0%到100%。设备防止过电流情况进入卡滞模式。设备通过使用上部MOSFET的rDS(ON)消除了对电流敏感电阻的需要。该设备提供SO20包装
振荡器
开关频率在内部固定为200kHz。内部振荡器产生三角形波形为PWM充放电与恒流内部电容器。电流输送到振荡器通常为50μA(Fsw=200KHz),可以使用连接在RT引脚和GND或VCC。因为RT引脚保持在固定电压(典型。1.235V),频率可变按比例地从销钉上沉(压)入的电流。特别是连接到GND的频率增加(电流从引脚下沉),根据以下关系:
将RT连接到VCC=12V或VCC=5V时,频率降低(电流被强制进入引脚),根据与以下关系:
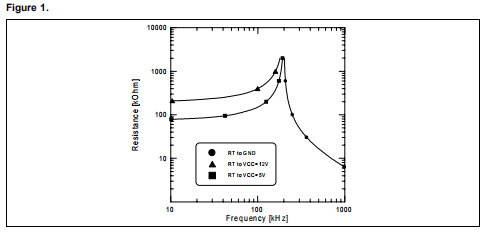
开关频率变化与RT的关系如图1所示。请注意,向该引脚施加50μa电流时,由于没有电流传输到振荡器。
数模转换器
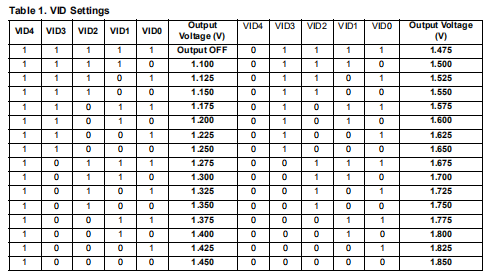
内置的数模转换器允许将输出电压从1.30V调整到2.05V50mV二进制步进,2.10V到3.50V,100mV二进制步进,如前表1所示。这个对内部基准进行了微调,以确保1%的精度。调节的内部参考电压由电压识别(VID)引脚编程。这些是内部DAC的TTL兼容输入,通过提供内部参考电压的一系列电阻实现。VID代码驱动多路复用器,该多路复用器在分隔线的点。DAC输出被传送到获得VPROG参考电压的放大器(即误差放大器的设定值)。提供内部上拉(通过5μa电流发生器实现);在这种情况下这样,编程逻辑“1”就足够让引脚浮动,而编程逻辑“0”就足够短了引脚接地。电压识别(VID)引脚配置还设置功率良好阈值(PGOOD)和过压保护(OVP)阈值。VID代码“11111”禁用该设备(作为SS引脚上的短路),并且不调节输出电压。
软启动和抑制
在启动时,通过10μa恒定电流向外部电容器CSS充电,产生斜坡,如如图1所示。当软启动电容器(VSS)上的电压达到0.5V时,低功率MOS被导通至dis 给输出电容充电。当VSS达到1V(即振荡器三角波的下限)时,上限MOS开始开关,输出电压开始增加。VSS增长电压最初钳制误差放大器的输出,因此VOUT线性增加,如图2所示。在这个阶段,系统以开环的方式工作。当VSS等于VCOMP时松开误差放大器输出端的钳位。在任何情况下,误差放大器输入端的另一个箝位保持激活状态,允许VOUT以较低的斜率增长(即VSS电压的斜率,见图2)。在第二阶段,系统以闭环方式工作,参考值不断增加。当输出电压达到所需的值VPROG,以及误差放大器输入上的箝位被移除,软启动完成。Vss增加到最大值约为4V。如果VCC和OCSET引脚同时存在,软启动将不会发生,并且相关引脚内部对地短路不超过自己的启动阈值。在正常运行期间,如果在其中一个两个电源中,SS引脚内部对GND短路,因此SS电容器迅速放电。器件进入抑制状态,迫使SS引脚低于0.4V。在这种情况下,两个外部MOSFET保持不变关闭。
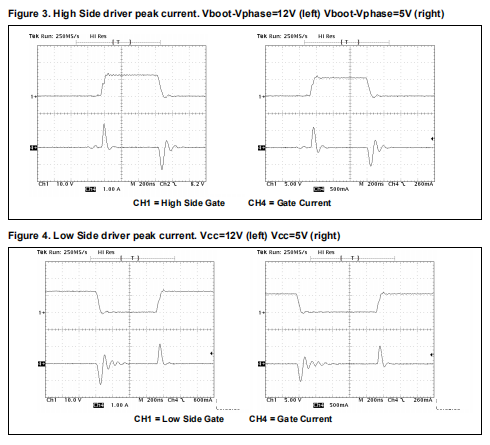
司机室高、低压侧驱动器的驱动能力允许使用不同类型的功率MOS(也可以是多个MOS降低RDSON),保持快速开关转换。低压侧mos驱动器由Vcc直接提供,而高压侧驱动器由启动引脚提供。采用自适应死区控制来防止交叉传导,并允许使用多种类型的mos fet。当下栅极大于200mV时,避免了上mos导通,而下mos导通为如果相位引脚超过500毫伏,则应避免。在任何情况下,上部mos在低压侧关闭。在5V和12V时,上(图3)和下(图4)驱动器的峰值电流都是4nF电容性的这些测量中使用了荷载。对于较低的驱动器,源峰值电流为1.1A@Vcc=12V和500mA@Vcc=5V,而sink峰值则为电流为1.3A@Vcc=12V,500mA@Vcc=5V。同样,对于上层驱动器,源极峰值电流为1.3A@Vboot Vphase=12V和600mA@VbootVphase=5V,而陷波峰值电流为1.3A@Vboot Vphase=12V和550mA@Vboot Vphase=5V。
监测和保护
输出电压通过引脚1(VSEN)进行监控。如果不在编程值的±12%(典型值)范围内值,则powergood输出强制为低。当输出电压达到比名义上的一个。如果输出电压超过此阈值,OVP引脚将被强制高电平,从而触发外部SCR关闭电源(VIN),只要检测到过电压,就会打开下部驱动器。为了执行过电流保护,该装置比较了高压侧MOS的压降,因为通过外部电阻(ROCS)的电压连接在OCSET引脚和漏极之间上莫斯。因此,过电流阈值(IP)可通过以下关系式进行计算:
当IOCS的典型值为200μA时。要计算ROCS值,必须将其视为最大值RDSON(也是随温度变化)和IOCS的最小值。为了避免意外触发过电流保护必须满足这种关系:
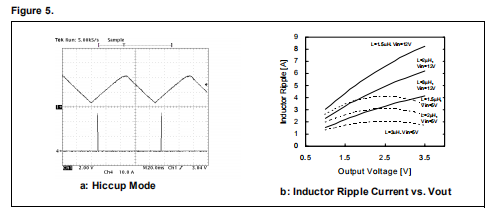
式中∆I为电感纹波电流,IOUTMAX为最大输出电流。在输出短路的情况下,软启动电容器以恒定电流(10μA典型值)放电,以及SS引脚达到0.5V软启动阶段重新启动。在软启动过程中,过流保护始终处于活动状态,如果发生此类事件,设备将关闭两个MOSFET,SS电容器将再次断电(在达到约4V的上限值之后)。系统现在在“打嗝”模式下工作,如图5a所示,在排除过流原因后,装置重新正常工作电源开关。
电感器设计
电感值由瞬态响应时间、效率和成本之间的折衷来定义还有尺寸。必须计算电感器以维持输出,并维持输入电压变化纹波电流∆IL在最大输出电流的20%和30%之间。电感值可通过以下关系式计算:
其中fSW是开关频率,VIN是输入电压,VOUT是输出电压。图5b显示在VIN=5V和VIN=12V的情况下,纹波电流与不同电感值的输出电压之比。增加电感值会降低纹波电流,但同时也会降低转换器负载瞬态响应时间。如果补偿网络设计良好,装置能够打开或关闭占空比高达100%或降至0%。响应时间现在是电感器所需的时间将其当前值从初始值更改为最终值。由于电感器尚未完成充电时间,输出电流由输出电容器提供。响应时间越短,输出电容越小必修的。负载瞬态的响应时间因负载的应用或移除而不同:如果在负载施加期间,电感器被等于输入和输出之间差的电压充电电压,在拆卸过程中,它只由输出电压放电。以下表达式给出了补偿网络响应足够快的情况下∆I负载瞬态的近似响应时间:

最坏的情况取决于可用的输入电压和选定的输出电压。不管怎样,最坏的case是负载移除后的响应时间,最小输出电压已编程,最大输入电压可用。
输出电容器
由于微处理器在进行负载瞬变时要求电流变化超过10A,因此输出电容器是电源快速响应的基本元件。在事实上,在最初的几微秒内,它们向负载提供电流。控制器立即识别负载瞬态,并将占空比设置为100%,但电流斜率受电感器值的限制。由于电容器内部的电流变化(忽略英语)
在负载瞬态期间,需要一个最小的电容值来维持电流而不放电。这个输出电容器放电引起的电压降可通过以下公式得出:

其中,DMAX是最大占空比值,即100%。ESR越低,输出降越低在负载瞬变过程中,输出电压的静态纹波越低。
输入电容器
输入电容器必须承受上部MOS导通时产生的纹波电流,因此必须具有低ESR,以尽量减少损耗。该纹波的rms值为:
其中D是占空比。当D=0.5时,方程达到最大值。最坏情况下的损失是:
补偿网络设计
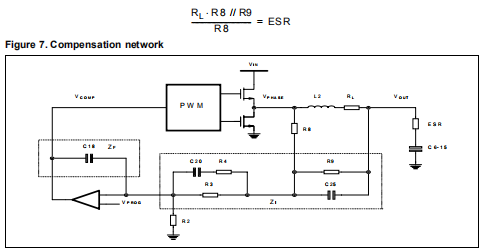
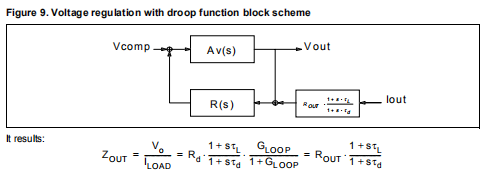
控制回路是一种电压模式(图7),它使用降速功能来满足VRM的要求模块化,减小了输出电容器的尺寸和成本。这种方法“恢复”了负载瞬态中由于输出电容器ESR引起的部分压降,引入了输出电压对负载电流的依赖性:在轻负载下,输出电压将高于标称水平,而在高负载下,输出电压将低于标称值。
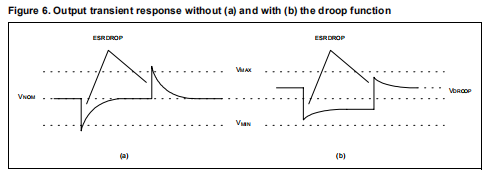
如图6所示,ESR降在任何情况下都存在,但使用降速函数,则输出电压最小。实际上,降速功能引入了与输出电流成比例的静态误差(图6中的Vdroop)。由于不存在感应电阻,因此使用电感的固有电阻(几个mΩ)。因此,在反馈信号中加入低通滤波电感电压(即电感电流),以简单的方式实现下垂功能。指的是如图7所示,闭环系统的静态特性为:

式中,VPROG是数模转换器的输出电压(即设定值),RL是电感抵抗。方程的第二项允许在零负载(∆V+)下产生正偏移;第三项引入下垂效应(∆VDROOP)。注意,如果出现以下情况,下垂效应等于ESR降:
考虑到先前的关系,可以确定R2、R3、R8和R9,以获得期望的下垂效应如下:为R2选择一个在数百KΩ范围内的值,以获得另一个的实际值组件。
根据上述等式,得出: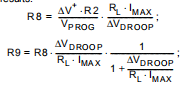
其中IMAX是最大输出电流。
必须选择部件R3,以获得R3<<R8//R9,以允许这些和连续的简化。因此,在降速功能下,输出电压随着负载电流的增加而降低,因此直流输出阻抗等于电阻路径。当输出阻抗与频率恒定时,很容易验证负载传输下的输出电压偏差最小。为了选择补偿网络的其他元件,考虑了电压环的传递函数。为了简化分析,假设R3<<Rd,其中Rd=(R8//R9)。
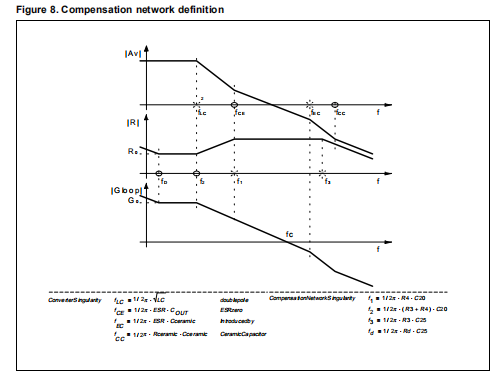
可以忽略R8与相位的连接来计算传递函数,因为,正如后面将要看到的,这种连接只有在低频时才重要。所以R4被认为与VOUT有关。在此消耗下,电压回路具有以下传递函数:

注意:为了理解前面假设的原因,必须考虑图9中的方案。在该方案中,由于在频率范围内,电感电流被负载电流代替对于下垂函数来说,这些电流基本上是相同的,并且假设下垂网络不代表电感器充电。
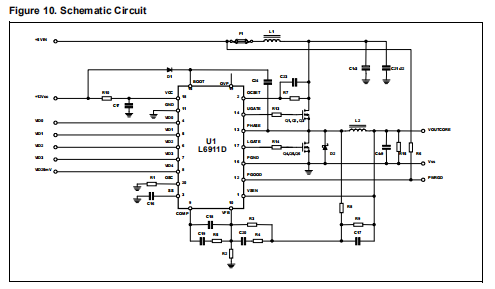
因为在感兴趣的范围| Gloop |>>1。为了得到一个平坦的形状,考虑的关系自然会随之而来。应用思路:1.100V至1.850V/25A图10显示了电流容量为25A的1.100V至1.850V转换的应用示意图。由于器件采用高栅极驱动,高、低压侧的mosfet可以使用三个以上高压侧建议使用STS11NF30L(30V,9mW典型值@Vgs=10V)mosfet,同时建议使用四种mosfet作为低压侧开关。