MCU点击型号即可查看芯片规格书
目前市场上扫地机器人的清洁打扫路径规划基本都是由超声波、红外等传感器测量当前位置结合算法规划出,由于传感器精度,轮子打滑导致无法测试出扫地机器人实际运行的精确轨迹和线路,Pixart PAA5100JE-Q Optical Tracking Chip为未来扫地机器人移动检测和位移坐标输出提供解决方案.
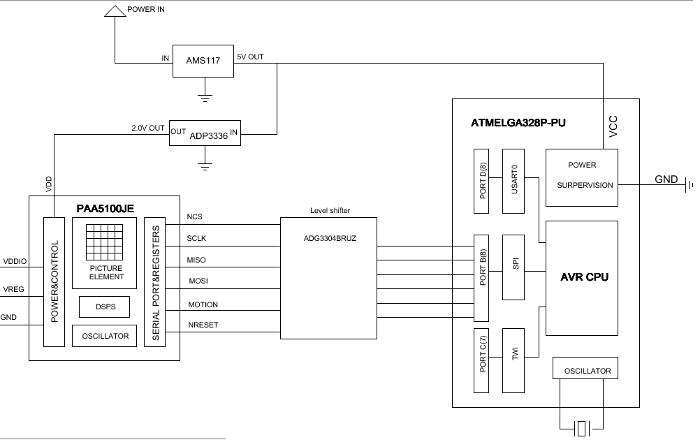
搭载了Pixart PAA5100JE-Q的扫地机器人的工作原理与我们常用的光电鼠标类似。扫地机器人靠外界环境光或发光二极管补光将地面影像通过透镜聚焦在senser array区内成像,当机器人移动时,其移动轨迹便会被记录为一组高速拍摄的连贯图像。再利用sensor 内的DSP对每张图像特征点进行处理比对,用以判断扫地机器人移动的方向以及位移,从而得到扫地机器人x、y方向的移动数据,最后通过SPI传给MCU。MCU对这些数据进行处理,来获取机器人的运动路径。


1. 判断检测物体移动的方向和速度。 2. 输出移动轨迹,对比设定的路线,调整移动方向和位置。 3. 检测扫地机遇到障碍,轮子打滑现象。
1. 检测距离15-35mm. 2. 已含透镜,不需要再装配额外的透镜。 3. 工作电流(Chip only)<9Ma. 4. Motion 侦测脚输出。
原文作者:Ron
