DRV104点击型号即可查看芯片规格书
特征
●高输出驱动:1.2A
●宽供电范围:+8V至+32V
●完成功能:脉宽调制输出
-可调内部振荡器:500Hz至100kHz
-数字控制输入
-可调延迟和占空比
-过流指示标志
●完全保护:
-带指示标志的热关机
-内部电流限制
●包装:HTSSOP-14表面贴装电源板™
应用
●机电驱动器:电磁阀,阀门、定位器、执行器、继电器、电源接触器线圈、加热器和灯
●流体和气体流动系统
●工厂自动化
●零件装卸机和分拣机
●照相处理
●环境监测和暖通空调
●热电冷却器
●电机速度控制
●螺线管保护器
●医疗分析仪
说明
DRV104是采用脉冲宽度调制(PWM)输出的DMOS高压侧电源开关。其坚固的设计是优化驱动机电设备,如阀门,螺线管,继电器,执行器和定位器。它也非常适合驱动热设备,如加热器、冷却器和灯。PWM操作节省了功率,降低了温升,从而提高了可靠性。此外,可调的脉宽调制允许对传送到负载时间从直流到脉冲宽度调制输出和振荡器频率可外部调节。
电路和驱动晶体管的独立电源引脚允许输出在与电路其他部分不同的电源上工作。
DRV104可以设置为提供强大的初始螺线管关闭,自动切换到软保持模式以节省电力。占空比可由电阻器、模拟电压或数模转换器控制,以实现多功能性。当发生热关机或过电流时,状态OK标志引脚指示。
DRV104在其情况下规定为-40°C至+85°C。裸露的引线框架必须焊接到电路板上。
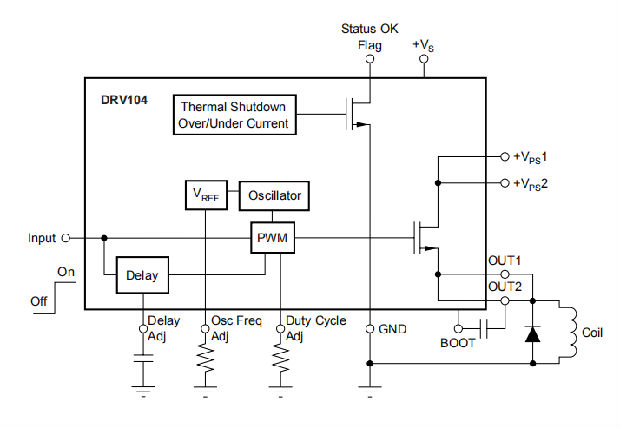
逻辑框图
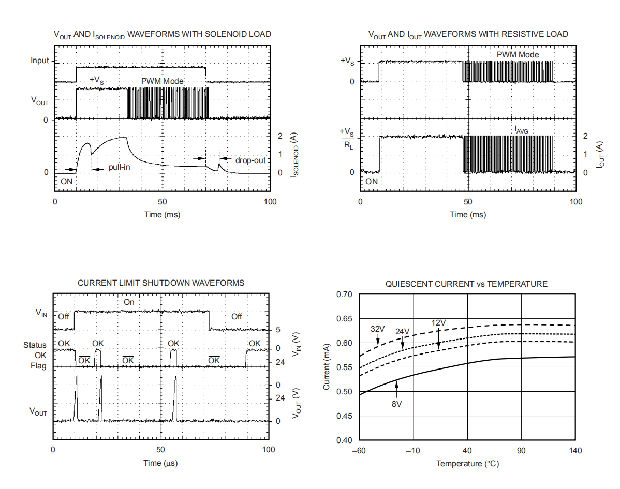
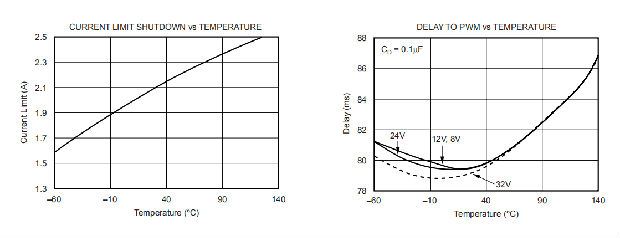
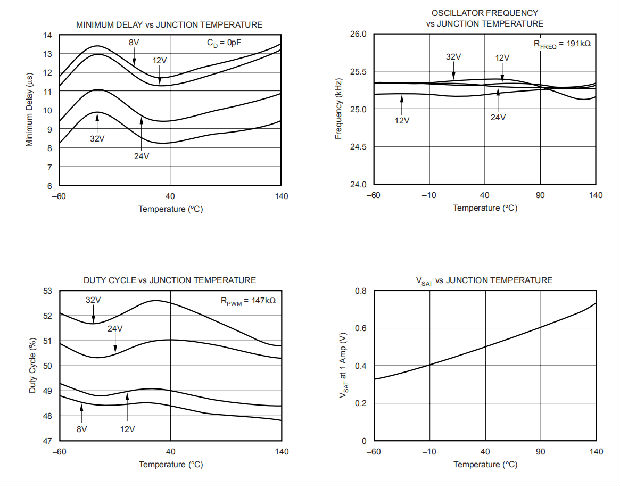
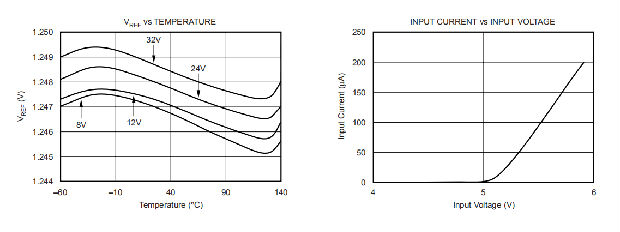
典型特征
在TC=+25°C和VS=+24V时,除非另有说明。
基本操作
DRV104是一个高侧DMOS电源开关,采用了一个驱动机电和热设备的PWM输出。它的设计针对两种应用进行了优化:作为电磁阀和执行器等负载的2状态驱动器(打开/关闭);以及用于阀门、定位器、加热器和灯具的线性驱动器。它的低0.45Ω导通电阻、小尺寸、可调的脉宽调制延迟和可调的占空比使其适合于广泛的应用。
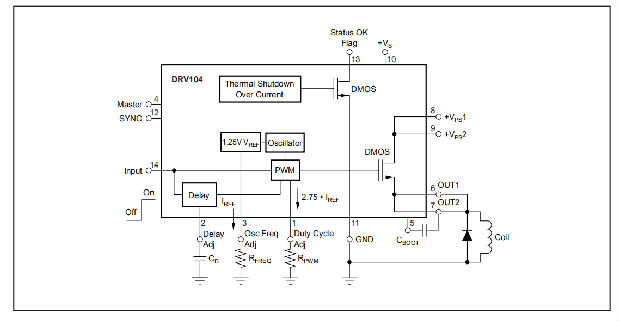
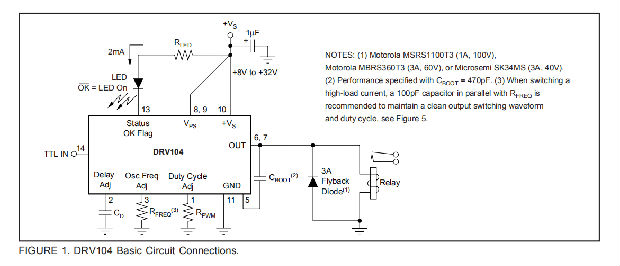
图1显示了操作DRV104的基本电路连接。建议在电源管脚上安装1μF(驱动大电流负载时为10μF)或更大的陶瓷旁路电容器。
控制输入(引脚14)为电平触发,与标准TTL电平兼容。在+2.2V和+5.5V之间的输入电压打开设备的输出,而在0V到+1.2V之间的电压关闭DRV104的输出。输入偏置电流通常为1微安。延迟调整(引脚2)和占空比调整(引脚1)允许外部调整脉宽调制输出信号。延迟调整管脚可以保持浮动,以使最小延迟达到PWM模式(通常为18微秒),或者可以使用电容器来设置更长的延迟时间。电阻器、模拟电压或来自D/A转换器的电压可用于控制PWM输出的占空比。D/A转换器必须能够接收2.75•IREF(IREF=VREF/RFREQ)的电流。
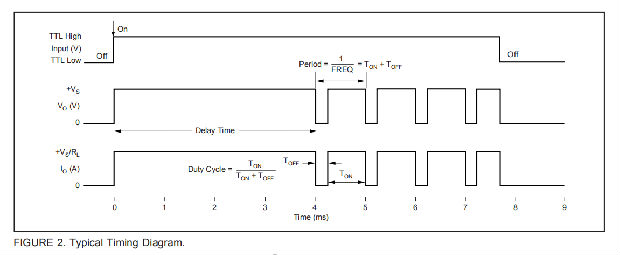
图2显示了一个典型的时序图,延迟调整引脚连接到4.7nF电容器,占空比设置为75%,振荡器频率设置为1kHz。有关公式和进一步解释,请参见可调和可调延迟时间部分。接地(针脚11)必须连接到系统接地,DRV104才能工作。负载(继电器、电磁阀、阀门等)应连接在接地和输出(针脚6、7)之间。对于电感负载,需要一个外部反激二极管,如图1所示。二极管在PWM操作的断开期间保持电感负载中的连续电流。对于远程定位的负载,外部二极管最好位于DRV104旁边。输出和接地之间的内部ESD箝位二极管不打算用作“反激二极管”。状态OK标志(引脚13)为过电流和热关机条件提供故障状态。在故障条件下,该引脚处于低激活状态,输出电压通常为+0.48V。
应用程序信息
电源
DRV104从一个+8V到+32V电源运行,性能卓越。在整个工作电压范围内,大多数行为保持不变。典型特性中显示了随工作电压显著变化的参数。
可调延迟时间(初始100%占空比)
DRV104的一个独特特性是它能够提供初始恒定的直流输出(100%占空比),然后切换到脉宽调制模式输出以节省功率。此功能在驱动电磁阀时特别有用,电磁阀的吸合电流要求远高于持续保持要求。该恒定直流输出的持续时间(在脉宽调制输出开始之前)可以由一个电容器进行外部控制,该电容器根据方程式1从延迟调整(引脚2)连接到接地:

(时间以秒为单位,CD以法拉为单位)
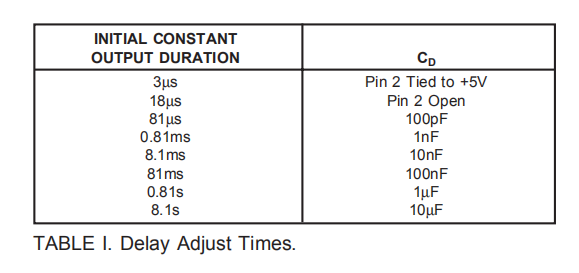
保持延迟调整引脚打开将导致大约18微秒的恒定输出时间。通过将引脚连接到5V,该初始输出的持续时间可以减少到小于3微秒。表I提供了使用选定电容值实现的延迟时间(在脉宽调制模式之前的恒定输出)的示例。
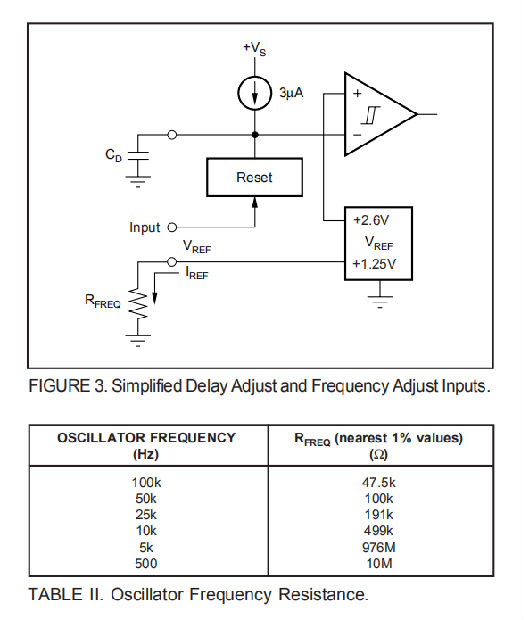
内部延迟调整电路由3μa电流源和2.6V比较器组成,如图3所示。因此,当管脚电压小于2.6V时,输出装置为100%开启(直流输出模式)。
振荡器频率调整
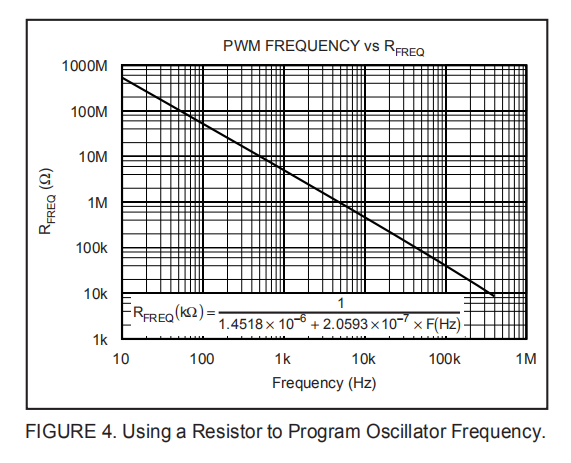
通过在Osc Freq Adj(引脚3)和接地之间连接一个电阻器(RFREQ),DRV104 PWM输出频率可以在很宽的范围内轻松编程。如表二所示,可以用实际电阻值实现500Hz至100kHz的范围。有关更多信息,请参阅图4所示的PWM频率与RFREQ图。虽然振荡器频率可以低于500Hz,但需要高于10MΩ的电阻。该引脚成为一个非常高的阻抗节点,因此对噪声敏感如果使用非常高的电阻值,则为传感器和PCB泄漏电流。有关频率调整输入的简化电路,请参阅图3。
DRV104的可调脉宽调制输出频率使其能够优化驱动几乎任何类型的负载。
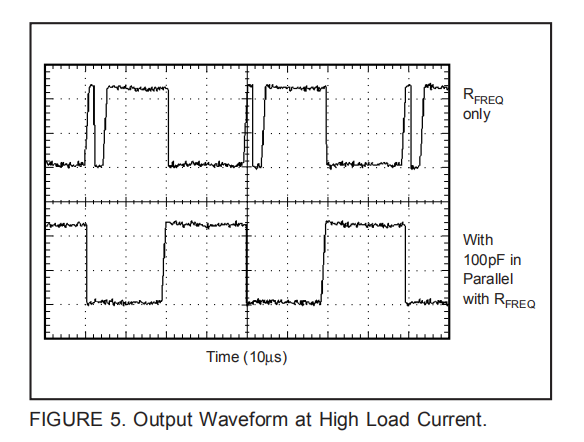
切换高负载电流时,建议使用与RFREQ并联的100pF电容器,以保持干净的输出切换波形和占空比,见图5。
可调占空比(脉宽调制模式)
DRV104的外部可调占空比提供了一种精确的方式来控制输送到负载的功率。利用外部电阻、模拟电压或D/a转换器的电压输出,占空比可以设置在10%到90%的范围内。低占空比会降低负载的功耗。这将保留DRV104和负载冷却器,从而提高两个设备的可靠性。
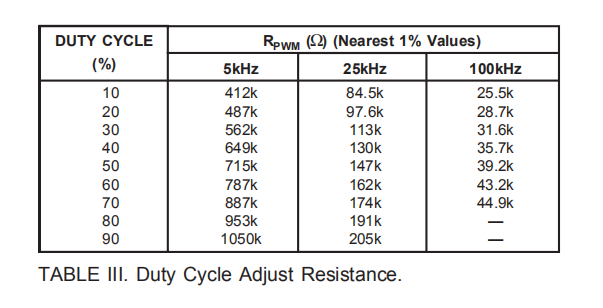
电阻控制占空比
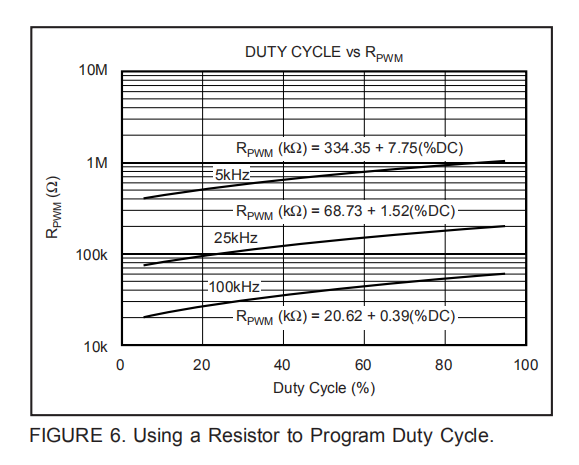
通过在占空比调整(引脚1)和接地之间连接一个电阻器(RPWM),很容易对占空比进行编程。高电阻值对应于高占空比。在100kHz时,可调占空比的范围限制在10%到70%。表三提供了典型占空比的电阻值。附加占空比的电阻值可从图6中获得。
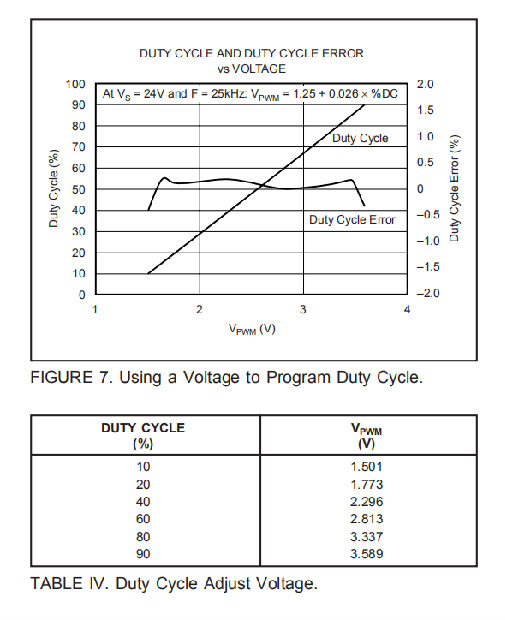
电压控制占空比
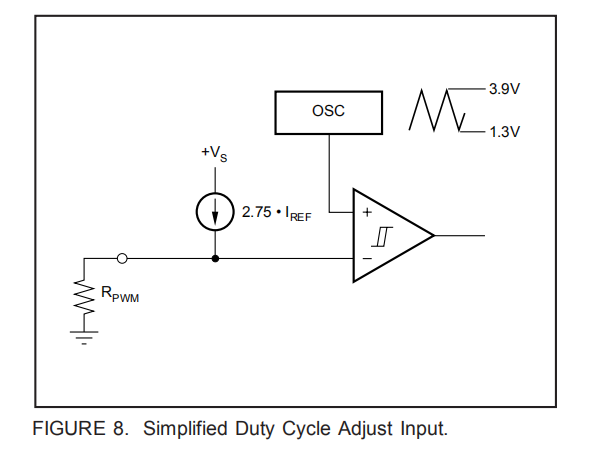
占空比也可以通过模拟电压编程VPWM。当VPWM≈3.59V时,占空比约为90%。降低此电压会导致占空比降低。表四提供了典型占空比的VPWM值。图7显示了占空比与VPWM及其线性度的关系。
占空比调节管脚由振荡器频率相关电流源内部驱动,并连接到比较器的输入端,如图8所示。DRV104的脉冲宽度调制调节本质上是单调的;也就是说,降低的电压(或电阻值)总是产生降低的占空比。
状态确定标志
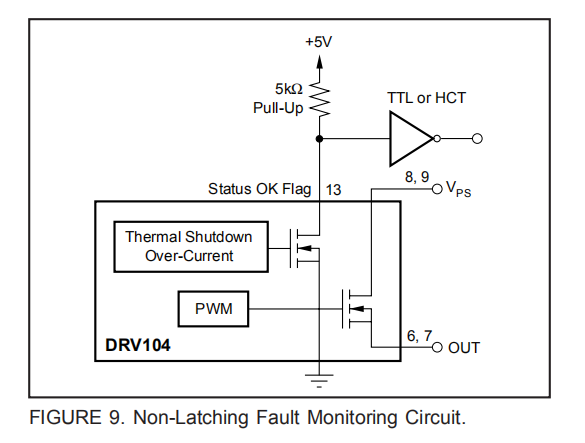
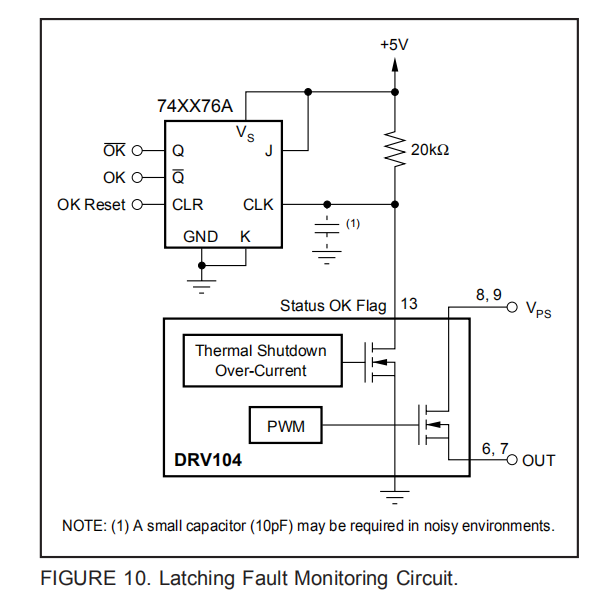
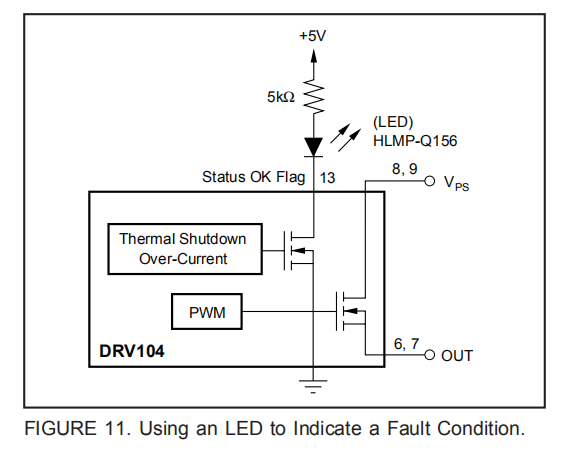
状态OK标志(引脚13)为过电流和热关机条件提供故障指示。在故障条件下,状态OK标志输出被驱动为低(引脚电压通常降至0.45V)。如图9所示,上拉电阻器需要与标准逻辑接口。图9还提供了非闭锁故障监测电路的示例,而图10提供了闭锁版本。Status OK标志引脚可以吸收高达10毫安的电流,足以驱动外部逻辑电路、簧片继电器或LED(如图11所示),以指示何时发生故障。此外,Status OK Flag pin可用于关闭系统中的其他DRV104s,以进行连锁故障保护。
过电流故障
当脉宽调制峰值输出电流大于通常2.0A时,会发生过电流故障。状态OK标志未锁定。由于在PWM模式期间的电流是打开和关闭的,状态OK标志输出将通过PWM定时进行调制(参见典型特性中的状态OK标志波形)。
避免在引脚6、7(输出)上增加电容,因为这会导致瞬时电流限制。
超温故障
当模具温度达到大约160°C时,会发生热故障,产生类似于将输入拉低的效果。内部关闭电路禁用输出。状态OK(正常)标志锁定在低状态(故障状态),直到模具冷却到大约140°C。
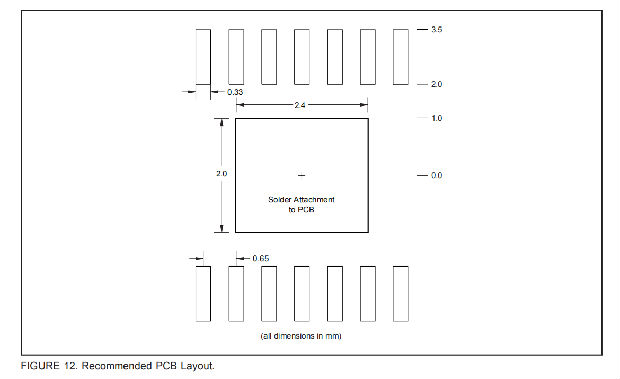
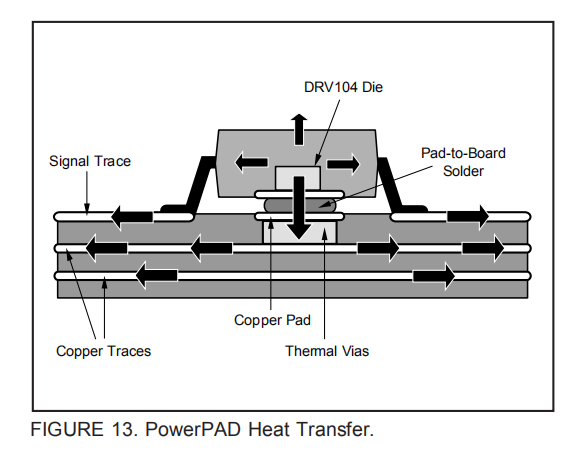
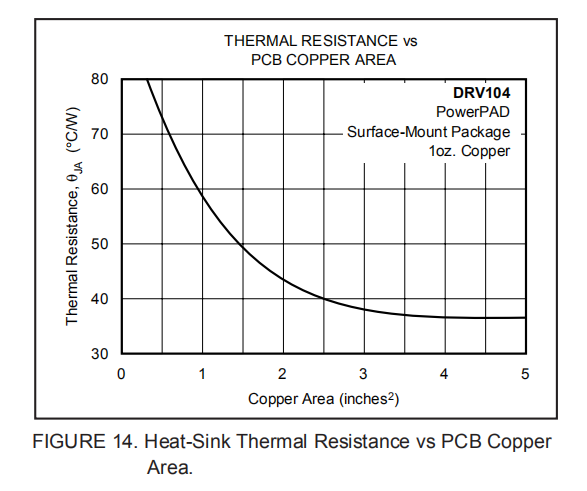
包装安装
图12为PowerPAD HTSSOP-14封装提供了推荐的印刷电路板(PCB)布局。PowerPAD HTSSOP-14封装的金属垫与其他引脚电隔离,理想情况下应接地。为了可靠运行,电源板必须直接焊接到电路板上,如图13所示。增加散热片的铜面积可以提高散热效果。图14显示了典型的连接到环境热阻作为PCB铜区的函数。
功耗
DRV104的功耗取决于电源、信号和负载条件。功耗(PD)等于输出电流乘以流过导电DMOS晶体管的电压乘以占空比的乘积。使用尽可能低的占空比来确保所需的保持力,可以使负载和DRV104中的功耗最小化。在1A时,输出DMOS晶体管的导通电阻为0.45Ω,在电流限制下增加到0.65Ω。
在非常高的振荡器频率下,DRV104的线性上升和下降时间中的能量会变得显著,并导致PD增加。
热保护
DRV104中的功耗导致其内部结温升高。DRV104有一个片内热关机电路,可以保护IC不受损坏。当结温达到大约+160°C时,热保护电路会禁用输出,使设备冷却。当结温降至约+140°C时,输出电路再次启用。根据负载和信号条件,热保护电路可以循环打开和关闭。这限制了驱动器的损耗,但可能对负载产生不良影响。
任何激活热保护电路的趋势都表明功耗过大或散热器不足。为确保可靠运行,接头温度应限制在最大+125°C。为评估完整设计(包括散热器)的安全裕度,请提高环境温度,直到触发热保护。使用最坏的负载和信号条件。为了获得良好的可靠性,热保护触发温度应高于应用程序的最大预期环境条件35°C以上。这将在最大预期环境条件下产生125°C的结温。
DRV104的内部保护电路设计用于防止过载情况。它并不打算取代适当的散热。将DRV104连续运行至热关机状态将降低设备的可靠性。
散热
大多数应用不需要散热器来确保不超过最大工作结温度(125°C)。但是,为了提高可靠性,结温应尽可能低。结温可根据下列方程式确定:
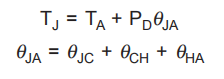
式中:
TJ=结温(℃)
TA=环境温度(℃)
PD=耗散功率(W)
θJC=接头到外壳的热阻(摄氏度/瓦)
θCH=外壳到散热器的热阻(℃/瓦)
θHA=散热器对环境热阻(℃/瓦)
θJA=接头对空气的热阻(°C/W)
在给定的环境温度下,使用散热器可显著增加最大允许功耗。
选择散热器的问题的答案在于确定DRV104所消耗的功率。对于纯阻性负载的直流输出,功耗只是负载电流乘以通过导电输出晶体管产生的电压乘以占空比。其他的负载并没有那么简单。一旦知道应用程序的功耗,就可以选择适当的散热器。
散热器选择示例
PowerPAD HTSSOP-14封装可散热2W。最大预期环境温度为35°C。找到合适的散热片,将结温保持在125°C以下。
结合方程式1和2得出:

给出了TJ、TA和PD。θJC在规格表中提供:2.07°C/W。θCH取决于散热器的尺寸、面积和使用的材料。半导体封装的类型和安装也会影响θCH。一个焊接到位的PowerPAD HTSSOP-14封装的典型θCH是2°C/W。现在,求解θHA:
要将连接温度保持在125°C以下,所选散热器的θ必须小于40.9°C/W。换句话说,高于环境温度的散热器温升必须小于81.8°C(40.9°C/W•2W)。
另一个需要考虑的变量是自然对流与强制对流气流。小型风机强制风冷可显著降低θ(θ+θ)。
如上所述,一旦选择了散热器,应在最坏的负载和信号条件下测试整个设计,以确保适当的热保护。
射频干扰/电磁干扰
任何开关系统都会因辐射或传导而产生噪声和干扰。DRV104采用可控的转换率电流开关来降低这些影响。通过将输出的上升时间减慢到1微秒,产生更低的开关噪声。
从DRV104到负载布线的辐射(天线效应)可以通过使用双绞线或屏蔽来最小化。建议使用良好的PCB接地平面,以实现低噪音和良好的散热效果。有关反激二极管的放置说明,请参阅旁路部分。
绕过
当开关负载小于0.5A时,1μF陶瓷旁路电容器足以实现均匀占空比控制。当开关大电流负载时,需要更大的旁路电容器。对于重型(1.2A)应用,建议使用10μF陶瓷电容器。在高负载电流下,在单独的电源上运行DRV104和负载驱动器也是可取的。旁路在绝对最大供电电压32V附近尤为重要。在电流过载的情况下,DRV104电流限制在微秒内响应,将负载电流降至零。在旁路不充分的情况下,储存在供电线路电感中的能量可以充分提升供电,使其超过电压击穿,并产生灾难性后果。
将长(感应)电缆驱动至远程负载时,将反激二极管放在DRV104端。这将使RFI/EMI最小化,并有助于保护输出DMOS晶体管免受dI/dt瞬态引起的击穿。快速整流二极管,如外延硅或肖特基型,推荐用作反激二极管。
应用电路
单通道和多通道
DRV104可用于电阻和电感负载的多种方式。作为一个单通道驱动器,它可以放在一个PC板上,也可以放在电磁阀、继电器、执行器、阀门、电机、加热器、热电冷却器或灯壳内。在高密度系统中,多通道功率驱动器可以紧密地封装在PC板上。对于这些开关应用,提供尽可能靠近驱动IC的电源旁路以避免尖峰从一个电路到另一个电路的交叉耦合是很重要的。此外,在一些应用中,可能需要保持拍频(DRV振荡器之间或DRV振荡器与系统时钟频率之间的和和和差)不干扰相对靠近功率驱动器的低电平模拟电路。不建议并联设备输出,因为负载分配不均会导致设备损坏。
非同步多信道系统中的拍频
在许多多信道系统中,当每个DRV使用自己的内部振荡器时,拍频是无关紧要的。
拍频可以有意设置在测量基带之外,以避免附近敏感模拟电路中的干扰。例如,对于两个DRV104s,通过将一个内部振荡器设置为62.5kHz的中心,另一个设置为40kHz,可以建立22.5kHz的拍频。考虑到±20%频率精度的要求,拍频范围可以从2kHz(48kHz和50kHz)到43kHz(75kHz和32kHz)。例如,通过将模拟测量带宽限制在100Hz,可以避免干扰。
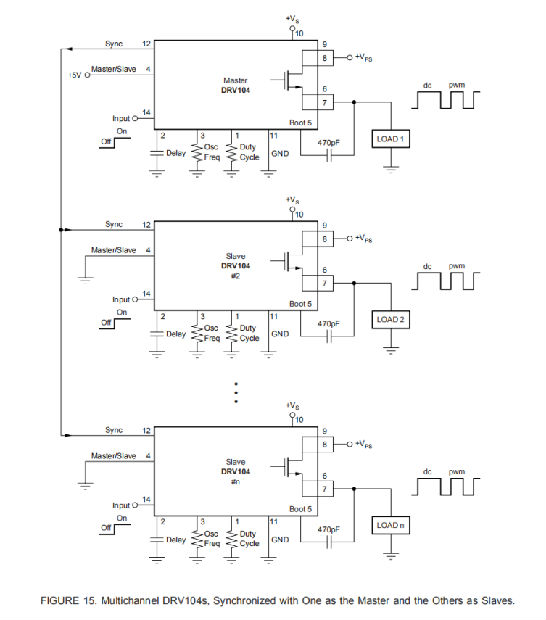
拍频消除-可选同步
在多通道系统中同步的好处是,在低电平模拟电路中可以避免测量干扰,特别是在物理上接近drv时。具体来说,同步将完成以下任务:
1.消除DRV或DRV与系统时钟之间的拍频。
2.预测安静或非开关时间。
通过对所有drv使用一个振荡器频率,可以实现DRV104s的同步。一个DRV内部振荡器作为主振荡器,另一个作为从振荡器,请参见图15。另外,一个外部时钟可以用作主时钟,所有其他时钟都可以用作从时钟。
峰值电源电流消除-可选开关偏斜
在许多系统中,特别是在仅使用少数信道或存在低幅度负载电流的情况下,不必改变开关时间。
在一些只使用PWM的多通道系统中,在没有初始直流延时的情况下,边缘同时切换会导致主电源产生较大的峰值电流。这类似于当多个开关电源从一个电源吸取电流时发生的情况。
通过同步振荡器和倾斜开关边缘可以降低峰值电流。如上文所述,同步具有消除拍频的附加好处。
通过使用多相时钟方法可以实现偏移,该方法故意延迟每个DRV在PWM边缘上切换的时间。
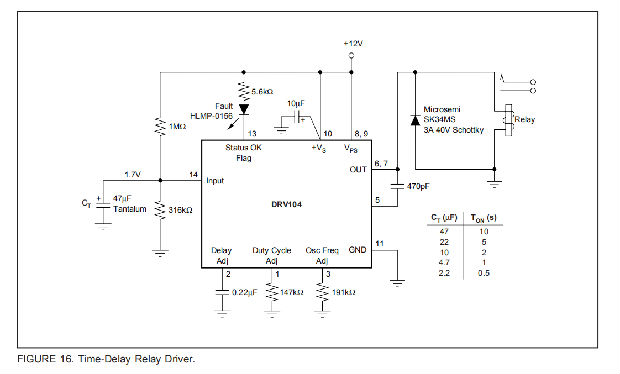
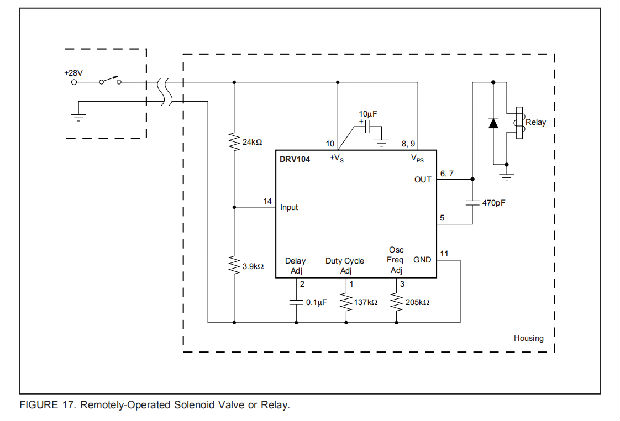
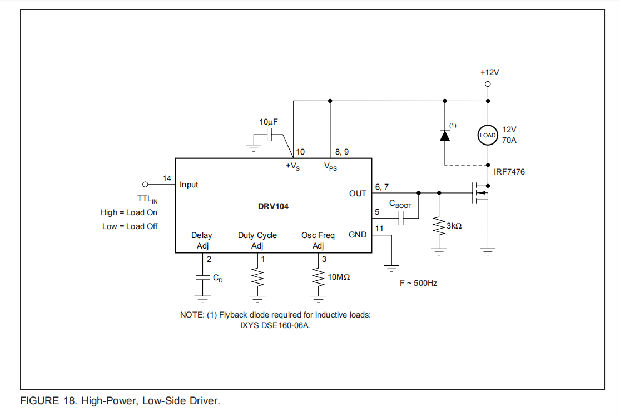
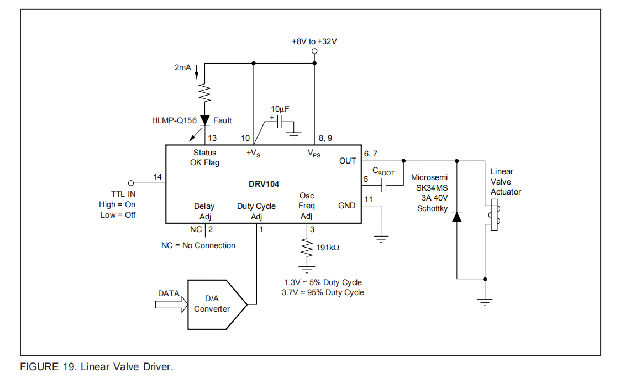
DRV104适用于各种继电器驱动器(见图16和17)以及阀门驱动器(见图18和19)。