150点击型号即可查看芯片规格书
220点击型号即可查看芯片规格书
ADIS16400点击型号即可查看芯片规格书
819点击型号即可查看芯片规格书
特征
三轴数字陀螺仪数字距离标度;±5°/秒,±150°/秒,±300°/秒设置;紧密正交校准,<0.05’;三轴数字加速度计±18克;三轴数字磁强计±2.5高斯;自主操作和数据收集;不需要外部配置命令;220 ms启动时间;4毫秒睡眠模式恢复时间;工厂校准灵敏度、偏差和轴向对准;ADIS16400校准温度:+25°C;ADIS1645校准温度范围:–40°C至+85°C;SPI兼容串行接口;嵌入式温度传感器;可编程操作和控制;自动和手动偏差校正控制;巴特利特窗FIR长度,抽头数;数字I/O:数据就绪,报警指示灯,通用;状态监测报警;电源管理的睡眠模式;DAC输出电压;启用最高1.2 kHz的外部采样时钟输入;单命令自检;单电源操作:4.75 V至5.25 V;2000克冲击生存能力;工作温度范围:-40°C至+105°C。
应用
无人机;平台控制;数字罗盘;导航。
一般说明
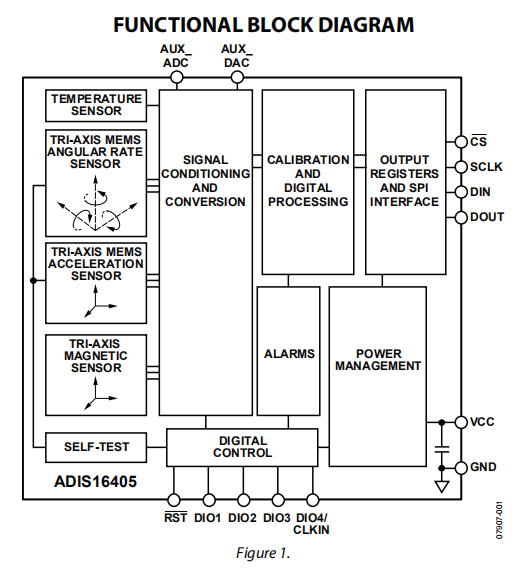
ADIS16400/ADIS16405 ISISOR®产品是完整的惯性系统,包括三轴陀螺仪、三轴加速度计和三轴磁力仪。ADIS16400/ADIS1645将业界领先的iMEMS®技术与优化动态性能的信号调节相结合。工厂校准描述了每个传感器的灵敏度、偏差、对准和线性加速度(陀螺仪偏差)。因此,每个传感器都有自己的校正公式动态补偿,该校正公式可在-40°C至+85°C的温度范围内提供精确的传感器测量。磁强计还采用自校正功能,以在温度范围内提供精确的偏置性能。
ADIS16400/ADIS16405提供了一种简单、有成本效益的方法,用于将精确、多轴惯性传感集成到工业系统中,特别是与离散设计相关的复杂性和投资。所有必要的运动测试和校准都是工厂生产过程的一部分,大大缩短了系统集成时间。紧密正交对准简化了导航系统中惯性系的对准。改进的串行外围接口(SPI)和寄存器结构提供了更快的数据采集和配置控制。通过使用与ADIS1635x和ADIS1636x系列兼容的引脚和相同的软件包,升级到ADIS16400/ADIS1645只需更改固件即可容纳其他传感器和注册地图更新。
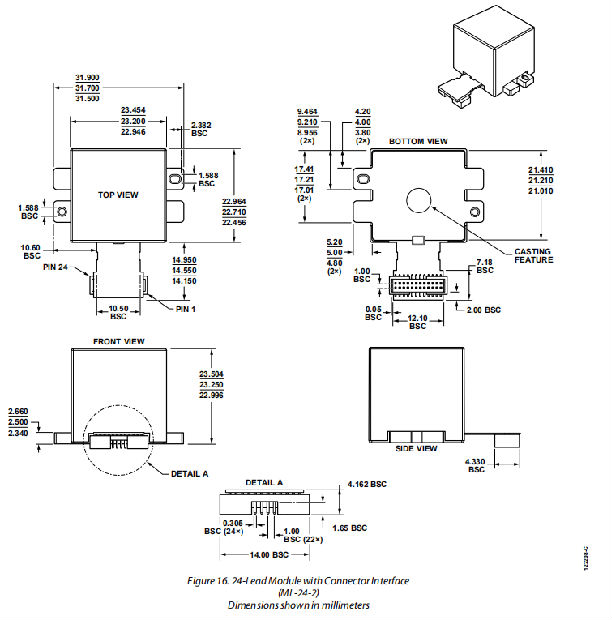
这些紧凑的模块约23毫米×23毫米×23毫米,并提供灵活的连接器接口,使多个安装方向的选择。
典型性能特征

操作理论
基本操作
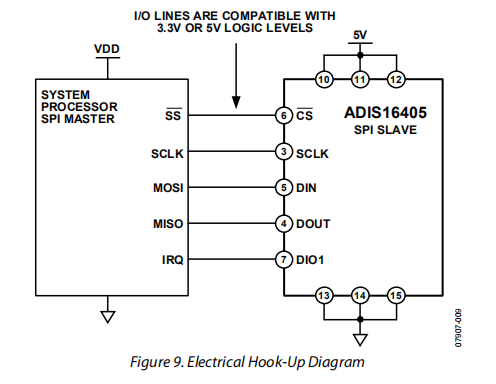
ADIS16400/ADIS16405是自主传感器系统,在施加有效电源电压后启动,然后以819.2 SPS的出厂默认采样率开始产生惯性测量数据。在每个采样周期之后,传感器数据加载到输出寄存器和DIO1脉冲中,为驱动系统级中断服务例程提供新的数据就绪控制信号。在典型的系统中,主处理器使用图9所示的连接通过SPI接口访问输出数据寄存器。表6提供了主处理器上每个管脚的一般功能描述。表7描述了典型的主处理器通常在配置寄存器中找到并用于与ADIS16400/ADIS16405通信的设置。
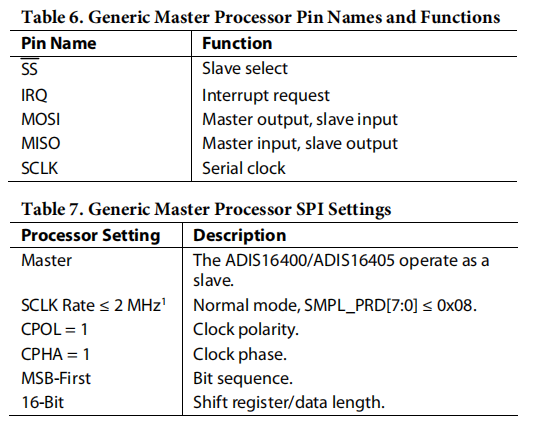
1、对于突发模式,SCLK速率≤1 MHz。对于低功率模式,SCLK速率≤300 kHz。
用户寄存器为所有输入/输出提供寻址SPI接口上的操作。每个16位寄存器有两个7位地址:一个表示高位字节,一个表示低位字节。
表8列出了每个寄存器的低字节地址,图10显示通用位分配。

读取传感器数据
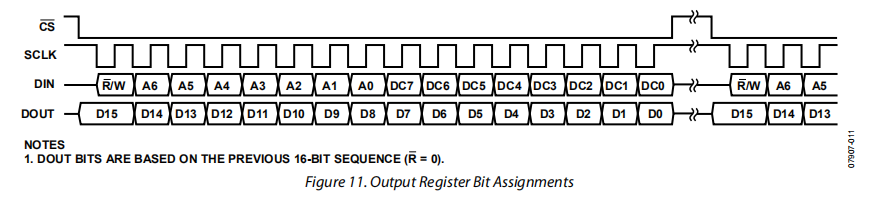
尽管ADIS16400/ADIS16405独立地产生数据,但它们作为SPI从设备工作,使用图11中所示的16位段与系统(主)处理器通信。单个寄存器读取需要两个这样的16位序列。第一个16位序列提供读取命令位(R/W=0)和目标寄存器地址(A6到A0)。第二个序列在DOUT线上发送寄存器内容(D15到D0)。例如,如果DIN=0x0A00,则在下一个16位序列中,XACCL_OUT的内容在DOUT行上移位。
SPI以全双工模式工作,这意味着主处理器可以从DOUT读取输出数据,同时使用相同的SCLK脉冲在DIN上传输下一个目标地址。
设备配置
用户寄存器内存映射(表8)用W(只写)或R/W(读/写)标识配置寄存器。配置命令也使用图11。如果MSB等于1,则将DIN序列中的最后8位(DC7到DC0)加载到与地址位(A5到A0)关联的内存地址中。例如,如果DIN=0xA11F,则0x1F在数据帧结束时加载到地址位置0x21(XACCL_OFF,高位字节)。
大多数寄存器在非易失性闪存中都有一个备份位置。主处理器必须管理备份功能。将GLOB_CMD[3]=1(DIN=0xBE04)设置为执行手动闪存更新(备份)操作,将用户寄存器复制到各自的闪存位置。此操作需要50毫秒,并且要求电源电压在指定的范围内才能正常完成。闪存寄存器提供这些事件的运行计数,用于管理闪存的长期可靠性。
突发模式数据采集
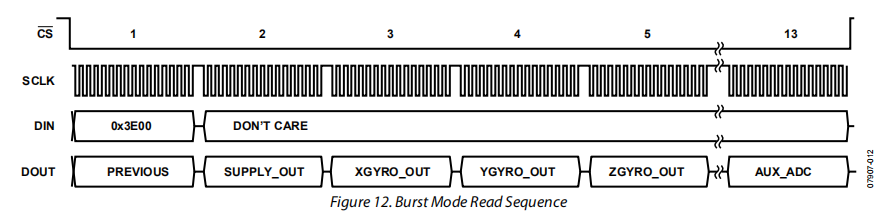
突发模式数据收集为从ADIS16400/ADIS16405收集数据提供了更有效的方法。在顺序数据周期(每个周期由一个SCLK周期分隔)中,所有输出寄存器在DOUT时超时。当DIN序列为0011110 0000 0000(0x3E00)时,此序列开始。接下来,每个输出寄存器的内容都是从DOUT输出的,从SUPPLY_OUT开始,到AUX_ADC结束(见图12)。表8所示的寻址序列决定了突发模式下的输出顺序。
输出数据寄存器
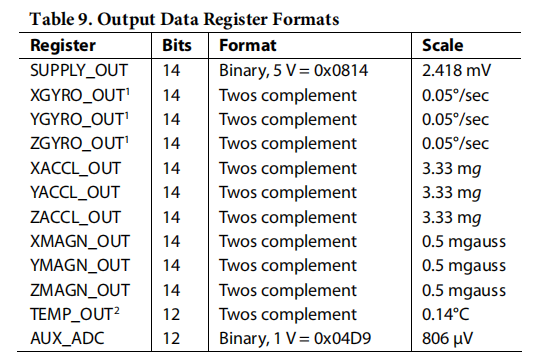
图6给出了每个陀螺仪、加速度计和磁强计的正测量方向。表9提供了ADIS16400/ADIS16405中每个输出数据寄存器的配置和比例因子。所有惯性传感器输出均为14位双补格式,即0x0000等于0 LSB,0x0001等于+1 LSB,0x3FFF等于-1 LSB。以下是如何从XGYRO_-OUT计算传感器测量值的示例:
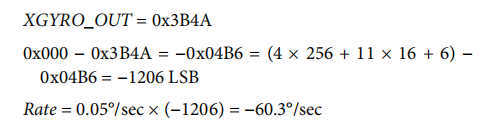
因此,0x3B4A的XGROULYOUT输出对应于在查看封装顶部时的Z轴(见图6)的60.3°/秒的顺时针旋转。
1、假设标度设置为±300°/秒。这个因素随范围而变化。此寄存器在25°C下的典型输出为0x0000。
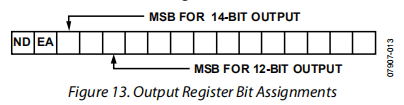
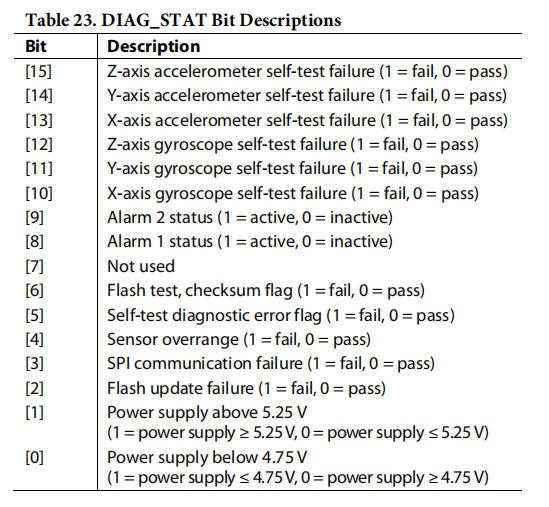
每个输出数据寄存器使用图13所示的位分配。ND标志表示未读数据驻留在输出数据寄存器中。此标志在输出寄存器读取序列期间清除并返回到0。在下一个内部样本用新数据更新寄存器后,它返回到1。EA标志表示DIAG_STAT寄存器(见表23)中的一个错误标志处于活动状态(真)。其余14位用于数据。
辅助模数转换器
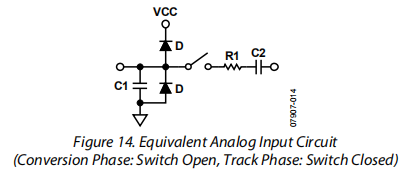
AUXYADC寄存器提供对辅助ADC输入通道的访问。ADC是一个12位逐次逼近转换器,它具有与图14所示的等效输入电路。最大输入为3.3伏。ESD保护二极管可处理10毫安而不会造成不可逆损坏。
开关的导通电阻(R1)的典型值为100Ω。采样电容器C2的典型值为16pf。
校准
手动偏压校准
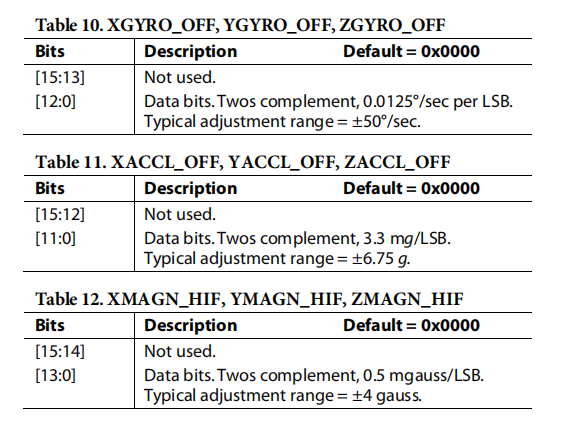
表10、表11和表12(磁强计的硬铁校正)中的偏置偏移寄存器为每个传感器的输出提供手动调整功能。例如,如果XGYRO_OFF等于0x1FF6,则XGYRO_OUT offset偏移量移动−10 LSB或−0.125°/sec。上字节的DIN命令是DIN=0x9B1F;下字节的DIN=0x9AF6。
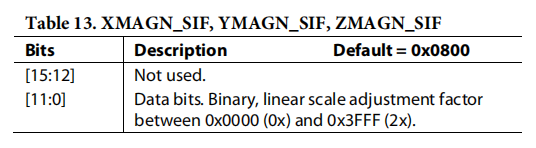
磁强计软铁校正(比例因数)
磁力计的软铁校正因子提供了改变每个单独轴的比例因子的机会。
陀螺仪自动偏压零点校准
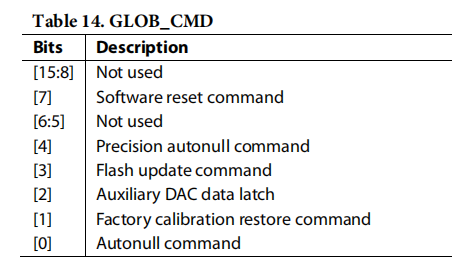
将GLOB_CMD[0]=1(DIN=0xBE01)设置为执行此功能,该功能测量陀螺仪输出,然后用相反的值加载陀螺仪偏移寄存器,以提供快速的偏移校准。然后,所有传感器数据重置为0,闪存在50毫秒内自动更新(见表14)。陀螺仪精度自动校零设置GLOB_CMD[4]=1(DIN=0xBE10)执行此功能,使传感器离线30秒,同时收集一组陀螺仪数据,并为每个陀螺仪计算更精确的偏差修正系数。一经计算,校正系数加载到三个陀螺仪偏移寄存器中,所有传感器数据重置为0,闪存在50毫秒内自动更新(见表14)。
恢复出厂校准
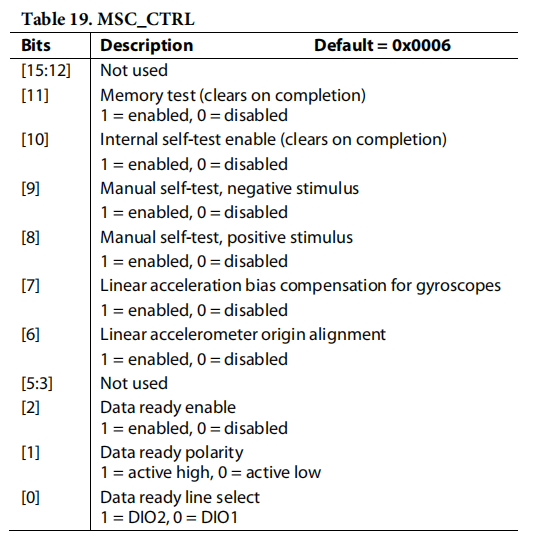
设置GLOB_CMD[1]=1(DIN=0xBE02)执行此功能,将每个用户校准寄存器(见表10、表11和图12)重置为0x0000,将所有传感器数据重置为0,并在50 ms内自动更新闪存(见表14)。线性加速度偏差补偿(陀螺仪)将MSC_CTRL[7]=1(DIN=0xB486)设置为启用低频加速度对陀螺仪偏差影响的校正。注意,DIN序列也保留了数据就绪功能的出厂默认条件(见表19)。
运行控制
全局参数配置
GLOB_CMD寄存器为几个有用的函数提供触发位。将分配的位设置为1开始每个操作,它在完成后返回位0。例如,将GLOB_CMD[7]=1(DIN=0xBE80)设置为执行软件重置,软件重置将停止传感器操作并在设备启动过程中运行设备。这包括在产生新数据之前加载控制寄存器及其各自的闪存位置。读取GLOB_CMD寄存器(DIN=0x3E00)启动突发模式读取序列。
内部采样率
SMPL_PRD寄存器使用表15中的位分配和以下等式提供离散采样率设置:t=t×(N+1),当SMPL_PRD[7:0]=0x0A时,采样率=149 SPS。
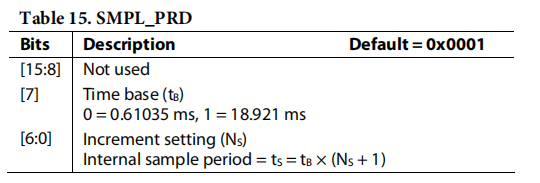
默认采样率设置819.2 SPS保留传感器带宽并提供最佳性能。对于重视较慢采样率的系统,只需以较慢的速率读取设备,并将内部采样率保持在819.2 SPS。使用可编程滤波器(SENS_AVG)在降低读取速率的同时降低带宽。数据准备功能(MSC_CTRL)可以驱动一个中断程序,该程序使用一个计数器来帮助确保在较低的更新率下的数据一致性。
电源管理
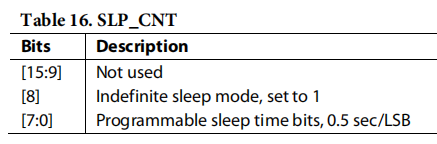
设置SMPL_PRD≥0x0A也将传感器设置为低功率模式。对于需要较低功耗的系统,insystem特性有助于用户量化相关的性能权衡。除传感器性能外,此模式还影响SPI数据速率(见表2)。设置SLP_CNT[8]=1(DIN=0xBB01)以启动无限睡眠模式,这需要CS断言(从高到低)、重置或电源循环以唤醒。使用SLP_CNT[7:0]将设备置于睡眠模式一段给定时间。例如,SLP_CNT[7:0]=0x64(DIN=0xBA64)使设备休眠50秒。
数字滤波
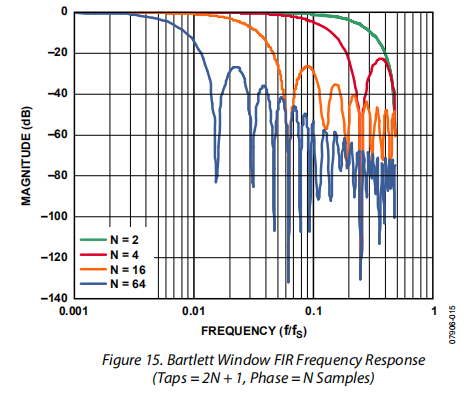
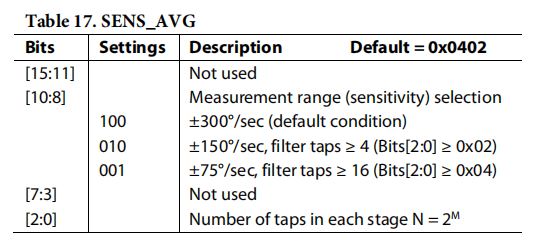
可编程低通滤波器为惯性传感器输出提供了额外的降噪机会。该滤波器包含两个级联平均滤波器,提供Bartlett窗口,FIR滤波器响应(见图15)。例如,SENS_AVG[2:0]=100(DIN=B804)将每个级抽头设置为16。当与819.2个SPS的默认采样率一起使用时,这将传感器带宽降低到大约16赫兹。
动态范围
陀螺仪有三个动态范围设置。较低的动态范围设置(±75°/sec和±150°/sec)限制最小滤波器抽头大小以保持分辨率。例如,将SENS_AVG[10:8]=010(DIN=0xB902)设置为±150°/sec的测量范围。由于此设置会影响筛选器设置,因此如果需要更多筛选,请编程SENS_AVG[10:8],然后编程SENS_AVG[2:0]。
输入/输出功能
通用I/O
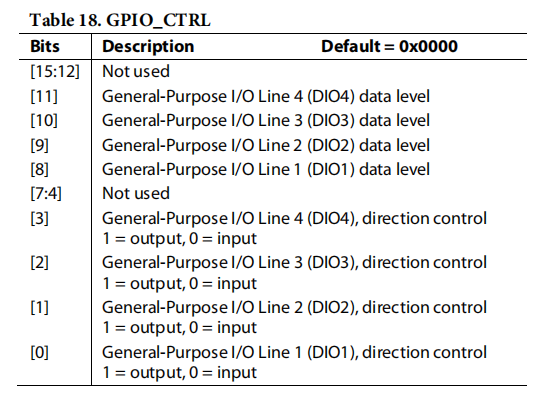
DIO1、DIO2、DIO3和DIO4是可配置的通用I/O线,根据以下控制寄存器优先级提供多种用途:MSC_CTRL、ALM_CTRL和GPIO_CTRL。例如,将GPIO_CTRL=0x080C(DIN=0xB308,然后0xB20C)设置为将DIO1和DIO2设置为输入,将DIO3和DIO4设置为输出,其中DIO3设置为低,DIO4设置为高。
输入时钟配置
输入时钟允许外部控制ADIS16400/ADIS16405。设置GPIO_CTRL[3]=0(DIN=0x0B200)和SMPL_PRD[7:0]=0x00(DIN=0xB600)以启用此功能。
数据就绪I/O指示器
出厂默认设置DIO1为正数据就绪指示信号。MSC_CTRL[2:0]寄存器提供用于更改此值的配置选项。例如,将MSC_CTRL[2:0]=100(DIN=0xB404)设置为更改需要负逻辑输入才能激活的中断输入的数据就绪信号的极性。在所有条件下,得到的脉冲宽度都在100μs到200μs之间。
辅助数字转换器
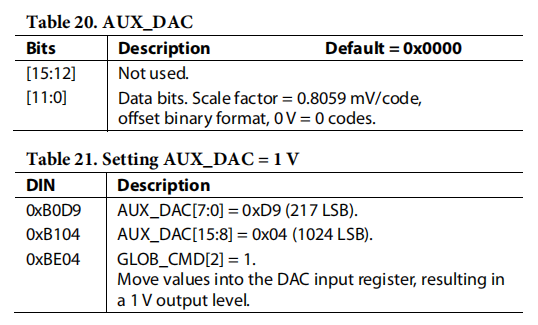
当12位辅助DAC线路没有下沉电流时,它可以将其输出驱动到接地基准的5 mV范围内。当输出接近0V时,线性开始下降(~100LSB起始点)。随着汇电流的增大,非线性范围增大。DAC latch命令将AUX_DAC寄存器的值移到DAC输入寄存器中,使两个字节同时生效。
诊断
自测
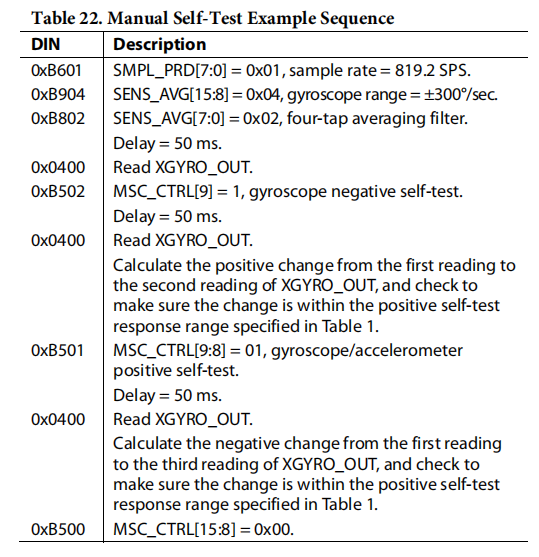
自测试功能提供了验证每个MEMS传感器机械完整性的机会。它对每个传感器元件施加静电力,从而产生模拟实际运动响应的机械位移。表1列出了每个传感器的预期响应,其中提供了通过/失败标准。将MSC_CTRL[10]=1(DIN=0xB504)设置为运行内部自检程序,该程序运行所有惯性传感器,测量每个响应,做出通过/失败决策,并将它们报告给诊断寄存器中的错误标志。MSC_CTRL[10]在完成例程后将自身重置为0。MSC_CTRL[9:8](DIN=0xB502或0xB501)提供对自检功能的手动控制。表22示出了使用该选项来检查X轴陀螺仪的示例测试流程。零运动提供更可靠的结果。表22中的设置是灵活的,并提供围绕速度和噪声影响的优化机会。例如,使用较少的滤波抽头会减少延迟时间,但会增加噪声影响的机会。
记忆测试
设置MSC_CTRL[11]=1(DIN=0xB508)对闪存位置执行校验和验证。通过/失败结果加载到DIAG U STAT[6]寄存器中。
地位
错误标志为常见的系统级问题提供指示函数。在每个诊断寄存器读取周期后,所有标志清除(设置为0)。如果错误条件仍然存在,则在下一个采样周期中,错误标志将返回到1。DIAG_STAT[1:0]不需要读取此寄存器就可以返回到0。
报警寄存器
报警功能提供对两个独立条件的监控。ALM_CTRL寄存器为数据源、数据过滤(比较前)、静态比较、动态变化率比较和输出指示器配置提供控制输入。ALM_MAGx寄存器建立触发阈值和极性配置。
ALM_SMPLx寄存器提供在动态变化率配置中使用的样本数。周期等于ALM_SMPLx寄存器中的数字乘以由SMPL_PRD寄存器建立的采样周期时间。
外形尺寸