8486点击型号即可查看芯片规格书
TLV271点击型号即可查看芯片规格书
C37点击型号即可查看芯片规格书
1.前言
有源钳位正激(ACF)控制器在高频dc-dc模块中很受欢迎:近零电压开关、减小尺寸的磁性器件和高能效的设计是ACF的特点。如果设计功率级需要注意任何高功率设计,那么从转换器的控制-输出传递函数可以很好地了解补偿策略,以满足交越和相位裕度等设计目标。本文将先论述ACF传递函数,然后再给出一个典型的补偿示例。
2.功率级运行
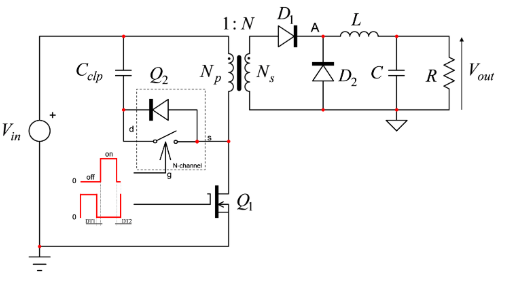
图1显示的是一个ACF的简化电路图,其具体运行细节可见参考文献[1]。正常情况下,晶体管Q1在经典的正激转换器中工作,但当它关断时,其退磁过程会涉及到钳位电容Cclp和初级电感Lmag之间的谐振周期。一部分存储在磁化电感中的能量会将漏极连接处的集总电容转移,同时VDS(t)上升,直到找到流过Q2体二极管的路径。然后,通过在零电压开关(ZVS)条件下导通Q2,使后者短路:现在,Q1的漏极被钳位到Vin加 Cclp的电压Vclp。考虑到Lmag和Cclp之间的谐振周期,循环电流最终会反转,并流过Q2(导通状态)和磁化电感Lmag。
图1:有源钳位正激转换器可以高开关频率运行
在某个点,控制器将指示Q2开通,迫使电流离开包括Cclp在内的网格,自然地流过输入源Vin和漏极集总电容:漏极节点开始下降,直到一个新的开关周期,从而降低了导通损耗。
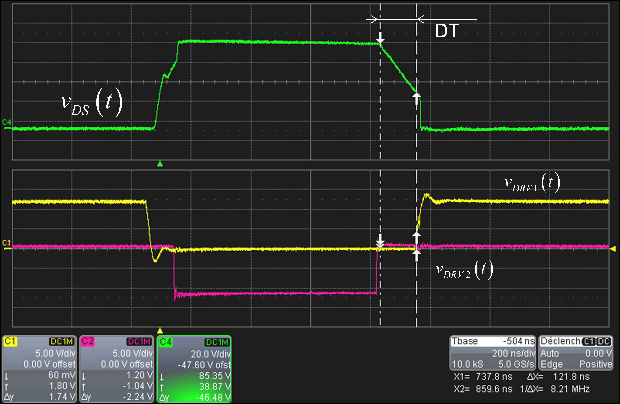
图2:当把死区时间调整得很好时,就可实现近ZVS的运行
如图2所示,在MOSFET转换之间插入了一个死区时间,从而提供了产生漏源谐振周期的时间,该周期现在涉及Clump 的Lmag,以达到一个谷点。在某些运行条件下(较小的输出电流),漏波触地会导致零导通损耗。
3.传递函数

在补偿转换器或任何系统之前,您需要功率级的控制-输出传输函数。换句话说,如果您想用正弦波来激励控制输入,这里指的是脉宽调制器(PWM),那如何通过功率级来传输信息,并在输出中产生响应呢?将响应与激励联系起来的数学关系就是我们需要的传递函数H。
公式(1)导出了电压模式下ACF的控制-输出传递函数,通过四阶多项式描述了该转换器:
方程由两个部分组成:左边是经典正激转换器项,其中:
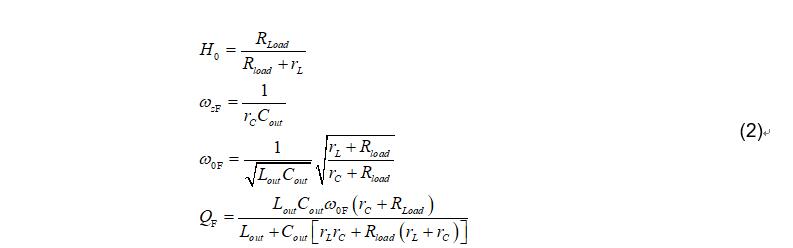
公式(1)中的第二项表示有源钳位电路的增加,以及围绕Cclp和Lmag建立谐振网络的影响:
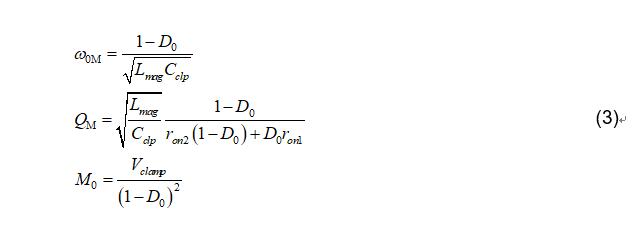
在这些表达式中,rL和rC分别表示输出电感(Lout)和电容(Cout)等效串联电阻(ESR),ron1表示主开关晶体管rDS(on),ron2表示有源钳位晶体管rDS(on),N表示变压器匝比,D0表示静态占空比。
根据该表达式,我们可获得10-Hz至100-kHz频率范围的幅值和相位响应的波特图(如图3所示)。各器件的值即为由安森美半导体的NCP1566参考文献[2]供电的3.3-V/30-A dc-dc模块的值。有源钳位部分是特意非阻尼的,并假定Q2 是低rDS(on)的MOSFET。
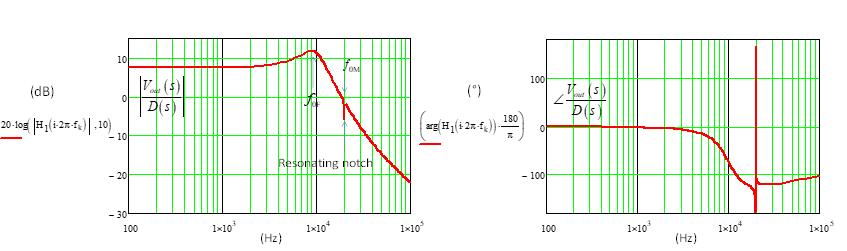
图3:控制-输出传递函数显示一个谐振陷波,强调出现双零点的相位
当频率达到公式(3)所描述的谐振时,您可观察到受相位严重失真影响的幅值毛刺。幅值下降归因于一次侧谐振电流的突增,这导致了一次侧功率MOSFET Q1的压降。如公式(1)中右侧项所示,此压降会从输入电压Vin中减去,并创建可观察到的响应陷波。根据参考文献[3]和文献[4]的建议,选择一个在Lmag-Cclp的最小谐振频率之前的交越点是明智的,因为此时存在严重的相位滞后。但是,如果在有源钳位电路中施加适当的阻尼,则可以扩展交越。如参考文献[5]所示,在瞬态条件下,必须仔细研究这种决策对主MOSFET漏源峰值电压的影响。图4显示相同的传递函数,现在被Q2的2.5-Ω rDS(on)所抑制:幅值和相位响应非常接近经典正激转换器的幅值和相位响应,而且可以在谐振陷波之外选择fc。
图4:当受阻抑时,谐振的毛刺效应会减弱,您可将交越推到谐振之外。
4.脉宽调制器
公式 (1) 中给出的表达式不包括PWM模块的影响。在一个隔离开的dc-dc转换器中,调节回路位于二次侧,光耦合器会偏置控制器反馈引脚来控制占空比。在大功率转换器中常见的一种方案是并联调节器:光耦合器不是通过公共发射极配置将引脚拉低至接地,而是通过发射极连接控制器并注入电流。此电流在内部呈镜像,可以拉低一个由50kΩ电阻加载的内部节点。这种电压偏置PWM比较器,可确保稳压。当输入动态电阻压降较小时,由于准恒定VCE电压,该技术使米勒效应最小化:光耦合器极被推到更高的频率,避免闭环时发生问题。动态电阻rd =400Ω,但对频率分析不产生影响。如果将电容反馈引脚接地,则会产生影响。但是,除此配置之外,阻抗需为ac,因为单独的光耦合器可以调节输入电流。此电流被10除(单位记为div),并通过拉高阻抗,调节内部操作点。
在倒相引脚上,定时电容Cramp由取决于输入电压的电流充电。因此,模拟锯齿波的斜率将与输入电压有关,随着Vin变化而动态地改变增益。此配置实现我们所谓的前馈操作。可能显示参考文献[6]该调制单元的小信号增益等于:
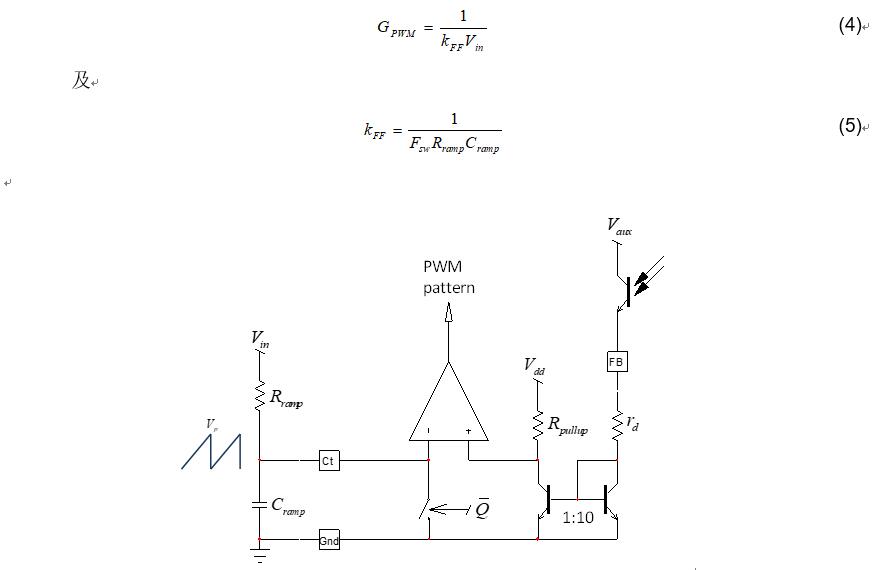
图5:光耦合器在反馈引脚中注入电流以调整控制器占空比
在公式(1)中,您可看到在方程的右边出现了Vin,表示传输函数的直流增益(s=0)将随输入电压的变化而变化。因此,交越频率和稳定性也许都会受到影响。通过PWM传递函数(公式(4)),分母中的Vin抵消了输入电压的影响,在输入范围内稳定了环路增益和交越频率。
5.Type 3补偿器
为设计ACF转换器的环路增益,我们需要将PWM模式激励因子D(s)与观察到的变量Vout(s)响应联系起来的传递函数。我们将通过极点-零点位置应用选定的设计策略,以确保转换器的强固性和良好的瞬态响应。
图6表示含一个Type3补偿器的典型架构,Type3补偿器采用光耦合器隔离。该光耦合器本身受电流传输比(CTR)和极点的影响,极点的位置取决于负载电阻。在本应用中,分流调节反馈输入读取光耦合器电流。负载电阻是rd且相当小,这意味着我们必须描述一个相当高频率的光耦合器极点,以便之后中和它参考文献[7]。这里注意,LED连接到二次侧的一个安静的Vcc点(或辅助电压Vaux),与Vout完全交流耦合。需要注意这一点,否则会产生快速的通道,使补偿器参考文献[7]的频率响应失真。LED中的交流电流(忽略其动态电阻)由下式给出:

其中Vop是运算放大器的交流输出电压。假设这是一个完美的运算放大器,电压则被定义为:
Zf 和 Zi 是图6中所圈部分的阻抗。从这两个网络中,我们可用快速分析电路技术参考文献[8]来推断我们想要的传递函数零点的位置。在Vout有激励的情况下,需要怎样的Zf 和 Zi 阻抗组合,才能使输出VFB为零?
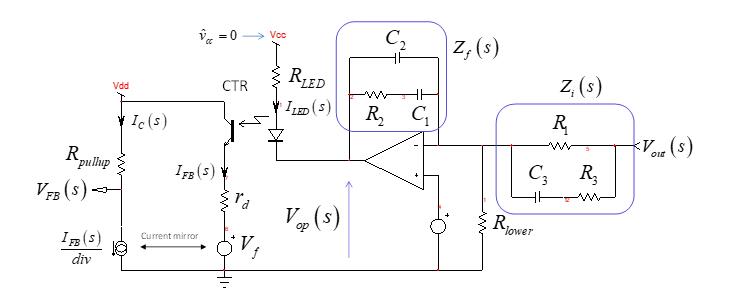
图6:使用电压模式有源钳位正向转换器闭环需要Type 3补偿器。
在本例中,Rpullup为50kΩ,RLED随意固定为1kΩ,而R1为1662Ω。
有两个条件:
当Vout在sz处调谐时,Zi 幅值无穷大,则VFB(sz) = 0 V。 Zi 由分子和分母D(s)组成。当D(sz) = 0时,这个阻抗无穷大。因此,这个一阶网络的极点是我们想要的零点。影响Zi的时间常数是通过暂时断开C3和“观察”通过其连接端子提供的电阻来获得的。在我们的思维中,时间常数是 ,网络极点或传递函数零点就仅是 。
当R2和C1串联构成变换短路时,输出也为零。这个阻抗被定义为 。您可以通过 得到零点,从而定义了第二个零点位置在 。接下来,我们可根据公式更新公式(7)。
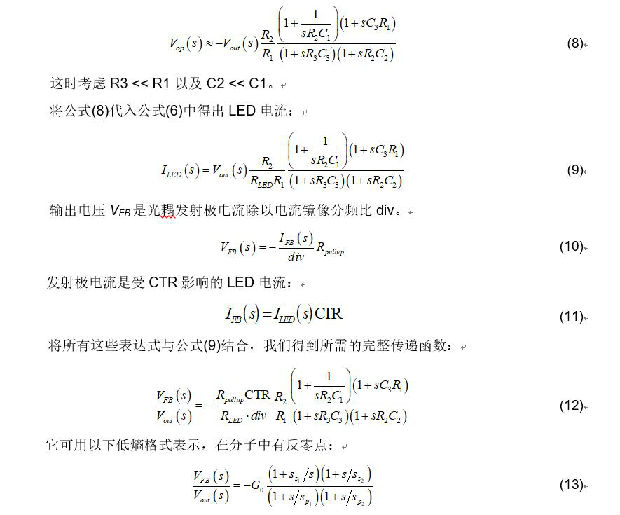
这时考虑R3 << R1 以及 C2 << C1。
将公式代入公式中得出LED电流:
输出电压VFB是光耦发射极电流除以电流镜像分频比div。
发射极电流是受CTR影响的LED电流:
将所有这些表达式与公式(9)结合,我们得到所需的完整传递函数:
它可用以下低熵格式表示,在分子中有反零点:
其中:
现在我们已有补偿器传递函数,我们需要一种方法来调整交越点上的期望增益或衰减。可以通过选择正确的R2值,同时需要考虑由设计固定的或制造商强加的其他器件值(例如,电路中的Rpullup)。公式(12)的幅值由下式确定:
您可从中提取R2的正确值,已知 表示所选交越频率fc处的所需增益或衰减:
一旦R2的值已知,就可以使用公式(15)至公式(18)对其余的补偿元素进行计算。
6.补偿策略
在手上有完整的Type3传递函数的情况下,我们可根据我们想要稳定的转换器的功率级响应来想出一种补偿策略。我们有几种选择来获得这一响应。我们可以用Mathcad®和我们给出的解析表达式(1)来计算它,也可在工作台上计算它。对于后一个选择,我们需要一个可以工作的硬件。另一个可行的选择是图7所示的SIMPLIS®仿真电路。
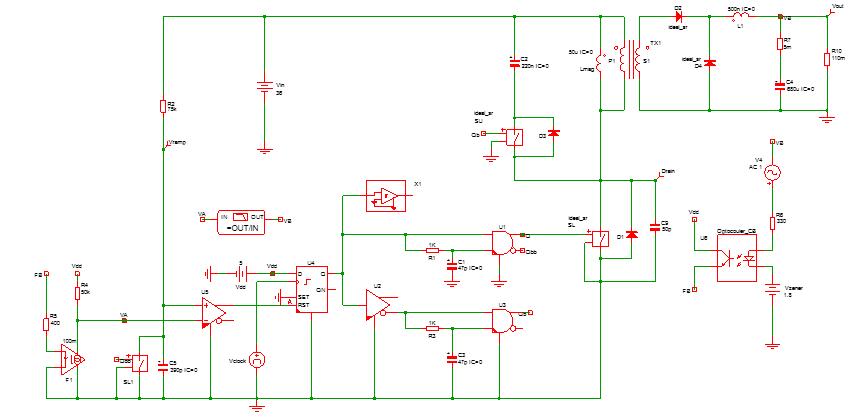
图7:该简单的闭环ACF模板使用演示版本元素
SIMPLIS®是个分段线性(PWM)仿真器,它可支持您从开关转换器中提取小信号响应。考虑到简单的模拟电路,控制-输出响应或 可在几秒钟内从演示版本元素(https:///)获得。图8给出了相位图和幅值图。该响应对应于从36-72-V输入线输出3.3V/30A的转换器的响应。主控制器是安森美半导体的NCP1566,以500kHz的开关频率工作。变压器匝比为6:1,二次侧电感为0.5µH。有源钳位谐振网络产生的毛刺得到了很好的控制,可安全地进行交越。本例中我们将选择一个30千赫的交越频率fc。
从这些图中可提取出如下信息:30kHz的幅值衰减约为11.8dB,而该频率的相位滞后达到133°。有了这些数据,补偿策略如下:
将双零点置于略低于以8.7千赫计算的输出滤波器谐振。通常情况下,如果转换器在DCM下转换,您可把一个零点置于谐振处,另一个置于更低频率处。这确保了在轻负载条件下好的相位裕度。在本例中,自驱动同步整流器将确保即使在空载时以CCM运行。
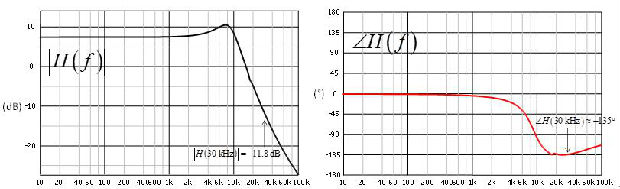
图8:开关波形确定了工作点,而小信号响应给出了稳定过程所需的信息
2. 将极点 置于开关频率的一半或250kHz。
3. 考虑60°的相位裕度目标参考文献[6],评估必要的相位升压。
该值确认需要Type3补偿器,因为90°是Type2的最大限值。
4. 补偿器将级联两个零点和两个极点。如果忽略原点贡献的极点,这些极点/零点对产生的相位升压是:

双零点和第二极点fp2已确定。确定fp1位置的感兴趣的角度是:
因此,我们需要定位第二极点,使相位升压等于105°:
5. 通过Mathcad®表单参考文献[2]计算的归一化器件值得到如下结果:R2为390 8486; (CTR = 1),C1 = 100 nF,C2 =22 nF,R3 = 27 Ω,C3 = 22 nF。
在30千赫左右处交越说明是快速运算放大器,其自身的响应将不会影响您想构建的Type3的波形。参考文献[9]解释了选择不当的运算放大器如何影响最终补偿器的性能,严重降低相位裕度。在本例中,我们选择了一个TLV271,最初的Type3相位和幅值响应没有受此电路的影响。另外,还要注意光耦合器对补偿器响应的影响。PS2801是经典的dc-dc转换器。如前所述,基于并联的反馈路径施加合理的集电极电流和调节发射极电压,仿照类似于级联的架构:考虑到接近恒定的Vce电压,米勒效应大大降低,自然地将光耦极点转到更高的频率。然而在30千赫处的交越频率,它仍可获得预期的相位裕度,我们已通过把一个简单的电容器与RLED并联去补偿它,如图6所示。
我们现在可绘制环路增益T(s),并核对裕度。图9显示了用Mathcad®绘制的环路增益。验证了理论上的30 kHz交越频率,以及期望的60°相位裕度。
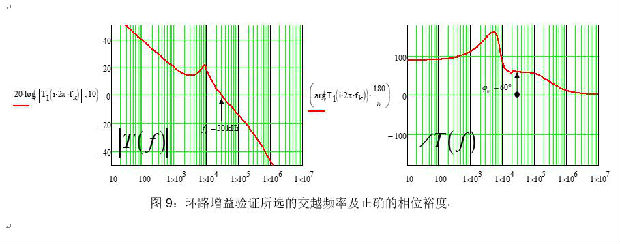
图9:环路增益验证所选的交越频率及正确的相位裕度
7.最终电路
图10显示了一次侧原理图,二次侧原理图如图11所示。NCP1566集成所有必要的特性,以构建强固和高能效的有源钳位转换器。
图10:一次侧使用了专为有源钳位转换器NCP1566设计的控制器
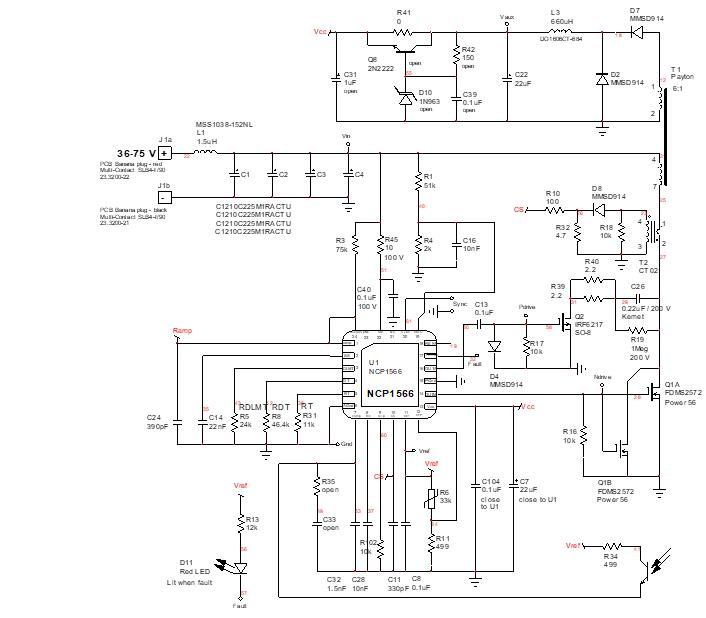
该器件集成各种保护和自适应死区时间,提高电路轻载能效。板载高压电流源确保启动序列并动态自供电(DSS):如果辅助绕组需要时间供应控制器,则DSS向IC提供能量,直到辅助电压累积并关断电流源。当在轻载或空载条件下跳过周期时,考虑到非常窄的脉冲,辅助绕组可能会损坏。DSS将在该模式下自动激活,为控制器自供电。
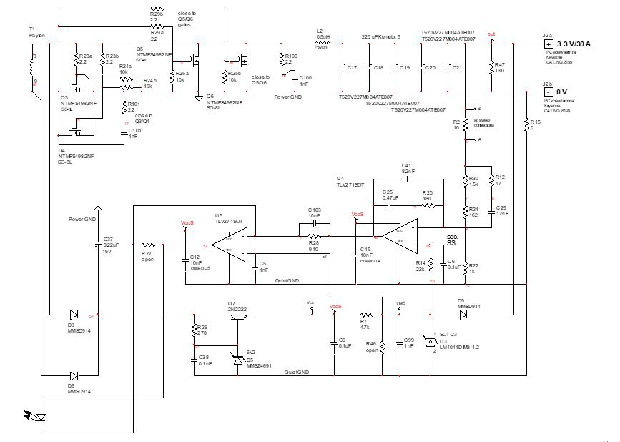
图11:二次侧应用两个运算放大器和一个电压基准
电源级使用Payton的平面变压器,通过一对自驱动同步整流器输入输出电感。由于一次侧延长的退磁周期,有源钳位正激转换器能够很好地直接驱动这些晶体管:二次侧的驱动电压在关断期间100%存在,并确保这些电压控制整流器的平稳运行。这不是经典的正激,经典的正激是当主电感退磁时,NVin电压从二次侧消失。
环路围绕两个运算放大器构建。第一个U4用于Type3补偿器,而U5驱动LED,很好地抑制了与Vout的电流相互作用(没有快速通道问题)。请注意,补偿值与计算出的值稍有不同,这是与这些dc-dc模块相关的困难之处。我们的计算仅处理小信号响应,并且当分量值被插入转换器中,环路如预期般稳定。然而,采用这些转换器还有问题,即Vout在通电时如何升高。上升必须是单调的,没有双斜率。这是个大信号运行,直到Vout稳定到其调节值为止。在此期间,很难预测各个电容器如何充电以及它们如何影响输出电压升高。施加单调启动的一种方式是经由R14和C6软启动二次侧参考电压U3。一旦转换器启动,C37两端的辅助电压迅速上升(C37需是小电容),并且通过C6上的低电压,它施加运算放大器U4以率先迫使Vout跟随C6的指数充电。在这种情况下,一次侧软启动持续时间被减少,以限制半导体上的应力,但必须限于这种作用,否则这两个软启动过程(一次侧和二次侧)可以对抗和扭曲输出电压上升。一些调整是必要的。
8.回路测量
图11中的电路显示了10-Ω电阻(R2)与电压检测分压器的上电阻串联。这种电阻在正常工作中保持回路关闭,不影响调节,因为它的值很低。通过将变压器连接到此电阻上,如图12所示,可以获得转换器的开环传递函数,而无需物理开环。这种技术是Middlebrook博士于70年代开创的,在参考文献[10]中有详细的描述。
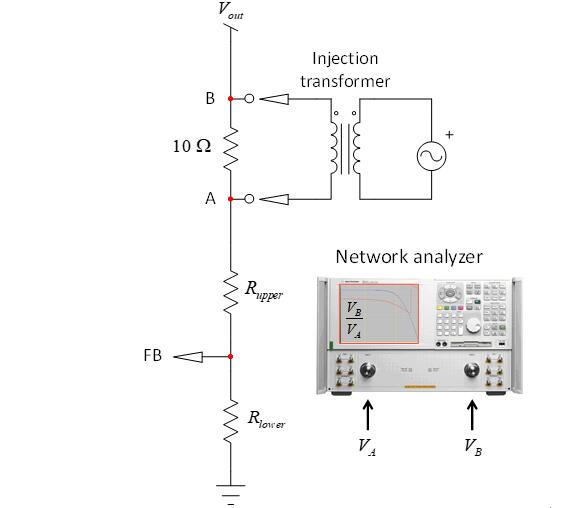
图12:10Ω电阻让您扫描转换器并获得传递函数选择
我建议在原型阶段加入此电阻,用两条简单的线来连接探头。当您处理布满小器件的多层印刷电路板时,此时板已装配回,您已无法再做更多改动。切割电线以插入小电阻并随后将探头连接到其上是复杂和危险的。在布板阶段可以更容易和更轻松地附加这些额外的焊盘。
为测量回路,我测试过新西兰CleverScope(https://cleverscope.com/)制造的CS328A仪器。该设备含2通道14位示波器和频率响应分析仪(FRA),且在非常有竞争力的价位。不需要插入隔离变压器,因为CS328A是一个固态注入器,您只需将探头连接到电源。仪器首先进行粗略扫描,并微调注入电平,以保持适当的信号/噪声比,而不影响线性。当仪器持久显示观察到的波形时,可以立即检查扫描期间是否发生饱和。且具备一个很不错的特性,避免连接另一示波器以监测与FRA并行的工作。扫描结果如图13所示,显示了正确的交越频率及略微的相位失真。进一步的分析表明,前端EMI滤波器在该点附近有谐振,并且需要足够的阻尼。一旦完成,毛刺如预期消失。
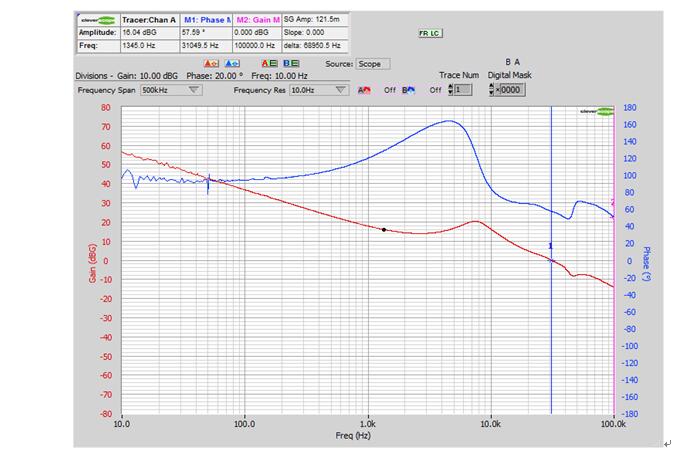
图13:测量验证了30 kHz交越及足够的相位裕度,并显示了前端EMI滤波器引起的毛刺。
9.总结
本文介绍了一种用于电压模式控制的有源钳位正激转换器的补偿策略。将仿真和数学求解器等工具结合,是实现设计和理解每个元素作用的最佳方法。而补偿策略则可被视为对器件的可变性补偿,之后通过工作台测量来验证。一旦该模型被认为与在硬件中表现一致,则必须在仿真环境中清除这些影响因素,以确保它们被所采用的补偿方案完全中和。
