750点击型号即可查看芯片规格书
特点:750毫安连续输出电流;45 V输出维持电压;内部钳位二极管;内部脉宽调制电流控制;低输出饱和电压;内部热关机电路;双极步进电机的半步或四分之一步操作双全桥pwm电机驱动器。
描述
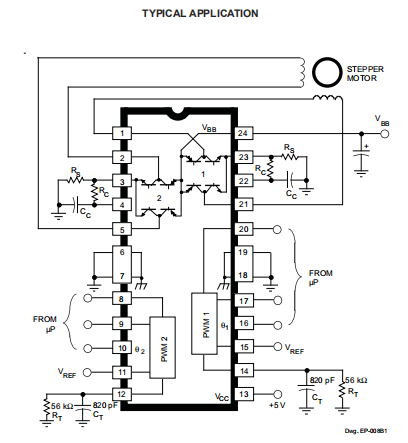
A2919电机驱动器设计用于驱动双极步进电机的两个绕组或双向控制两个直流电机。两个电桥都能维持45v电压,并包括内部脉冲宽度调制(pwm)控制输出电流至750ma。输出已优化为低输出饱和电压降(小于1.8v总电源加500毫安汇)。
对于pwm电流控制,最大输出电流由用户选择参考电压和感应电阻决定。两个逻辑电平输入选择最大电平的0%、41%、67%或100%的输出电流限制。每个电桥的相位输入决定了负载电流的方向。
这些电桥包括接地钳位和反激二极管,以防止感应瞬变。当切换电流方向时,内部产生的延迟会阻止交叉电流。不需要特殊的通电顺序。如果芯片温度超过安全工作极限,热保护电路将禁用输出。
A2919采用24针表面贴装SOICW提供,损耗尽可能小。A2919是热沉片,提高了功耗能力。可在-20°C至85°C的温度下运行,也可在+125°C的温度下运行,此蝙蝠翼结构可提供最大的机组功率。
应用程序信息
pwm电流控制
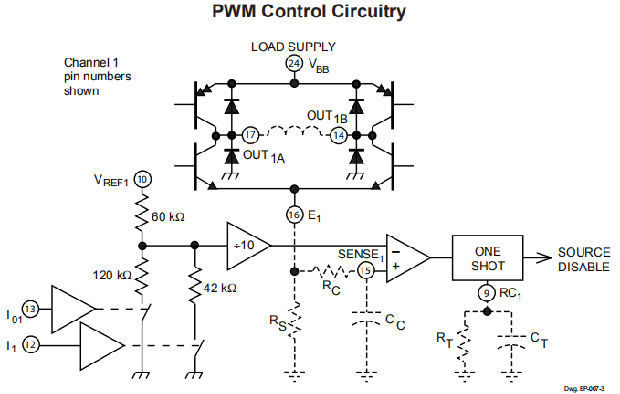
A2919双桥设计用于驱动双极步进电机的两个绕组。输出电流由外部感测电阻器(R)、内部比较器和单稳态多谐振荡器在每个电桥中独立感应和控制。
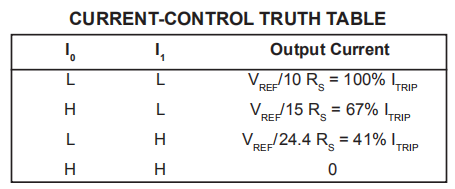
当电桥打开时,电机绕组中的电流增加,并通过外部感测电阻器流动,直到感测电压(V)达到比较器输入设置的水平: ITRIP = VREF/10 RS
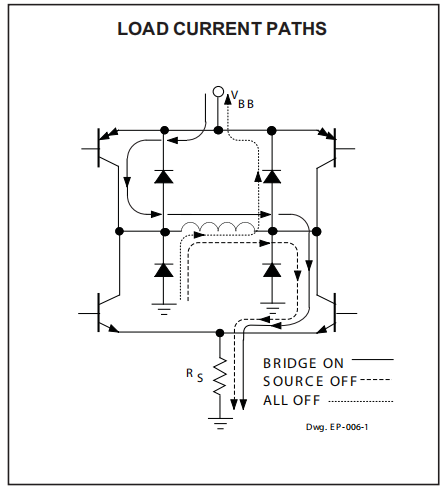
然后比较器触发monostable,从而关闭网桥的源驱动程序。由于内部逻辑和开关延迟,实际负载电流峰值将略高于跳闸点(特别是低电感负载)。此延迟(t)通常为2μs。关闭后,电机电流衰减,通过接地钳位二极管和接收器晶体管循环。源驱动器关闭时间(因此电流减少的幅度)由单稳态外部RC定时元件确定,其中t在20 kΩ至100 kΩ和100 pf至1000 pf的范围内。
固定关闭时间应足够短,以使电流斩波保持在可听见的范围(<46μs)以上,并足够长,以适当调节电流。由于只有慢衰减电流控制可用,短断开时间(<10μs)需要额外的努力来确保适当的电流调节。在使用短路时间时,可能对适当调节电流的能力产生负面影响的因素包括:较高的电机电源电压、轻负载和比必要的空白时间更长的时间。
当源驱动器重新启用时,绕组电流(感应电压)再次被允许上升到比较器的阈值。这个周期会重复,使电机绕组的平均电流保持在所需水平。
具有高分布电容的负载可能会导致电流尖峰,使比较器跳闸,从而导致错误的电流控制。外部RC延时应用于延迟比较器的动作。根据负载类型,许多应用程序不需要这些外部组件(传感连接到E)。

输出电流的逻辑控制
两个逻辑电平输入(L和I)允许数字选择每个表中最大电平的100%、67%、41%或0%的电机绕组电流。0%输出电流条件关闭电桥中的所有驱动器,并可用作输出启用功能。
这些逻辑级输入大大增强了μp控制驱动格式的实现。
在半步操作期间,L和L允许μP以八步顺序在所有位置之间以恒定扭矩控制电机。这是通过数字选择100%的驱动电流时,只有一个阶段是开和67%的驱动电流时,两相是开。L和L上的逻辑高关闭所有驱动器以允许快速电流衰减。
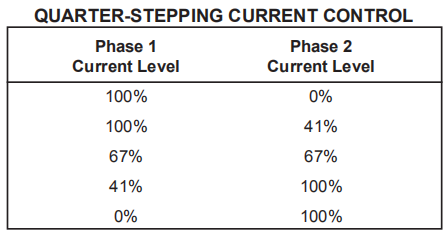
在四分之一步操作期间,我和我允许μp以十六步顺序控制电机位置。这是通过数字选择驱动电流来实现的,如表所示(对于一个工作象限)。我和我都关闭了所有驱动程序,以允许快速电流衰减。
逻辑控制输入也可用于选择“保持”条件下的减小电流水平(和减小的功耗)和/或启动条件下的增大电流(和可用扭矩)。
一般
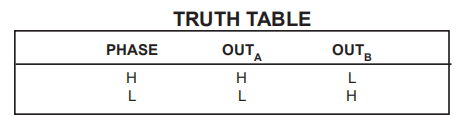
每个电桥的相位输入决定了电机绕组电流的方向。内部产生的死区时间(约2μs)可防止切换相位输入时出现交叉电流。
电桥输出中的所有四个驱动器都可以在两个步骤之间关闭(L=l_2.4V),从而通过内部输出钳位和反馈二极管产生快速电流衰减。在半步和高速应用中,需要快速电流衰减。相位,L,和I输入高电平。
改变参考电压(V)为微步进应用提供峰值负载电流的连续控制。当结温达到+170°C时,热保护电路关闭所有驱动器。它仅用于保护设备不受结温过高引起的故障影响,不应意味着允许输出短路。当结温降至+145°C时,输出驱动器重新启用。
A2919输出驱动器是优化低输出饱和电压小于1.8V总(源加汇)在500毫安。在正常运行条件下,当结合蝙蝠翼组件设计的优异热性能时,这允许两座桥梁在500毫安时同时连续运行。