一般说明
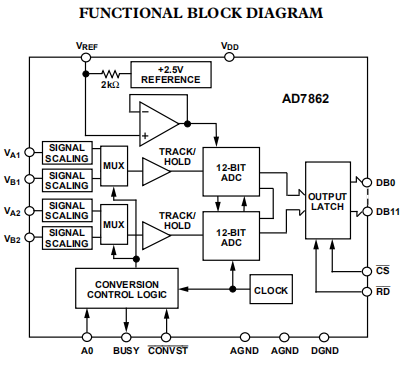
AD7862是一款高速、低功耗、双12位A/D转换器,由一个+5V电源供电。该部分包含两个4μs逐次逼近adc、两个跟踪/保持放大器、一个内部+2.5v基准和一个高速并行接口。有四个模拟输入被归为由a0输入选择的两个通道(a和b)。每个通道有两个输入端(V&VOR V&V),可以同时采样和转换,从而保留两个模拟输入端信号的相对相位信息。该部件接受±10 V(AD7862-10)、±2.5 V(AD7862-3)和0–2.5 V(AD7862-2)的模拟输入范围。部件模拟输入上的过电压保护允许输入电压分别达到±17 V、±7 V或+7 V,而不会造成损坏。
单个转换开始信号(convst)同时将两个磁道/保持置于保持状态,并在两个输入端启动转换。忙碌信号表示转换结束,此时可读取两个通道的转换结果。转换后的第一次读取从va1或vb1访问结果,而第二次读取从va2或vb2访问结果,这取决于复用器选择a0分别是低还是高。数据通过带有标准CS和RD信号的12位并行数据总线。除了传统的直流精度指标如线性、满标度和偏移误差外,该部分还规定了动态性能参数,包括谐波失真和信噪比。
AD7862采用模拟器件的线性兼容CMOS(LC2MOS)工艺制造,这是一种将精密双极电路与低功耗CMOS逻辑相结合的混合工艺。可提供28铅SSOP、SOIC和DIP。
产品亮点
1、AD7862具有两个完整的ADC功能,允许同时对两个通道进行采样和转换。每个adc都有一个2通道输入mux。启动转换后,两个通道的转换结果均为3.6微秒。
2、AD7862由一个+5 V电源供电,典型耗电量为60兆瓦。自动断电模式,即在转换完成后零件进入断电状态,并在下一个转换周期前“唤醒”,使AD7862成为电池供电或便携式的理想选择应用。
3、该部分提供了一个高速并行接口,便于与微处理器、微控制器和数字信号处理器连接。
4、该部分有三个版本,具有不同的模拟输入范围。AD7862-10提供±10 V的标准工业输入范围;AD7862-3提供±2.5 V的公共信号处理输入范围;而AD7862-2可用于单极0 V–+2.5 V应用。
5、该部分的特点是两个输入采样和保持放大器之间的孔径延迟匹配非常紧密。
术语:信噪比
这是在A/D转换器输出端测得的信噪比(噪声+失真)。信号是基波的均方根振幅。噪声是所有非基本信号的有效值之和,不超过采样频率(f/2)的一半,不包括直流电。该比率取决于数字化过程中量化层级的数量;层级越多,量化噪声越小。具有正弦波输入的理想N位转换器的理论信噪比(噪声+失真)由下式给出:

因此对于12位转换器,这是74 dB。
总谐波失真
总谐波失真(thd)是谐波的均方根和与基波的比值。对于AD7862,定义如下:
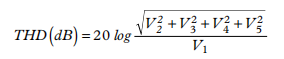
其中v是基波的均方根振幅,v1,v2,v3,v4 and v5是第二次谐波至第五次谐波的均方根振幅。
峰值谐波或杂散噪声
峰值谐波或杂散噪声被定义为adc输出频谱中下一个最大分量(最高fs/2,不包括dc)的均方根值与基波的均方根值之比。通常,本规范的值由频谱中最大的谐波确定,但对于谐波埋入噪声层的部分,它将是噪声峰值。
互调失真
当输入由两个频率fa和fb的正弦波组成时,任何具有非线性的有源器件都会在mfa±nfb的和频和差频产生畸变产物,其中m,n=0,1,2,3等。互调项是m和n都不等于零的项。例如,二阶术语包括(fa+fb)和(fa-fb),三阶术语包括(2fa+fb),(2fa-fb),(fa+2fb)和(fa-2fb)。
AD7862使用CCIF标准进行测试,其中使用接近输入带宽顶端的两个输入频率。在这种情况下,二阶和三阶项的意义是不同的。二阶项通常在频率上与原始正弦波相距较远,而三阶项通常在接近输入频率的频率上。因此,二阶和三阶术语是分开指定的。互调失真的计算是根据thd规范进行的,其中它是单个失真产品的rms和与以dbs表示的基波的rms振幅的比值。
通道间隔离
信道间隔离度是测量信道间串扰水平的一种方法。它是通过分别向四个输入端中的每一个应用满标度100 kHz正弦波信号来测量的。这些,依次,分别参考其输入接地的其他三个信道,并且测量adc输出以确定来自其他信道的串扰水平。给出的数字是所有四个频道中最坏的情况。
相对精度
相对精度或端点非线性是通过adc传递函数端点的直线的最大偏差。
微分非线性
这是ADC中任意两个相邻代码之间的测量值和理想1 LSB变化之间的差值。
正满标度误差
这是最后一个代码转换(01)的偏差。…110到01。…111)调整双极偏移误差后,从理想的4×VREF–3/2 LSB(AD7862-10±10 V范围)或VREF–3/2 LSB(AD7862-3,±2.5 V范围)。
正满标度误差(AD7862-2,0 V至2.5 V)
这是最后一个代码转换(01)的偏差。…110到01。…111)调整单极偏移误差后,从理想VREF–3/2 LSB开始。
双极零点误差(AD7862-10,10 V,AD7862-3,2.5 V)
这是中尺度跃迁(所有1到所有0)与理想agnd–1/2 lsb的偏差。
单极偏移误差(AD7862-2,0 V至2.5 V)
这是第一个代码转换(00)的偏差。…000到00。…001)来自理想agnd+1/2 lsb。
负满标度误差(AD7862-1610V;AD7862-3,62.5V)
这是第一个代码转换(10)的偏差。…000至10。…001)调整双极零点误差后,从理想值–4×VREF+1/2 LSB(AD7862-10±10 V范围)或–VREF+1/2 LSB(AD7862-3,±2.5 V范围)开始。
跟踪/保持采集时间
跟踪/保持采集时间是跟踪/保持放大器输出达到其最终值所需的时间,在转换结束后的±1/2 LSB(跟踪/保持返回到跟踪模式的点)。它还适用于在所选输入信道中发生变化的情况,或者在应用于ad7862的所选vax/bx输入的输入电压上存在阶跃输入变化的情况。这意味着用户必须等待跟踪/保持采集时间的持续时间,在转换结束后或在信道改变/阶跃输入改变为vax/bx后,才开始另一个转换,以确保部件按规范运行。
转换器详细信息
AD7862是一款高速、低功耗、双12位A/D转换器,由一个+5V电源供电。该部分包含两个4μs逐次逼近adc、两个跟踪/保持放大器、一个内部+2.5v基准和一个高速并行接口。有四个模拟输入被归为由a0输入选择的两个通道(a和b)。每个通道有两个输入端(va1&va2或vb1&vb2),可以同时采样和转换,从而保留两个模拟输入端信号的相对相位信息。该部件接受±10 V(AD7862-10)、±2.5 V(AD7862-3)和0 V–2.5 V(AD7862-2)的模拟输入范围。部件模拟输入上的过电压保护允许输入电压分别达到±17 V、±7 V或+7 V,而不会造成损坏。AD7862有两种工作模式,高采样模式和自动休眠模式,在转换结束后,部件自动进入休眠状态。这些模式将在“定时和控制”一节中详细讨论。
在AD7862上通过脉冲转换器启动转换输入。在convst的下降沿上,两个片上磁道/保持同时处于保持状态,并且在两个通道上开始转换序列。该部件的转换时钟是使用激光修剪时钟振荡器电路在内部生成的。忙碌信号表示转换结束,此时可读取两个通道的转换结果。转换后的第一次读取从va1或vb1访问结果,而第二次读取从va2或vb2访问结果,这取决于复用器选择a0分别是低还是高。读取数据通过带有标准CS的12位并行数据总线和rd信号。
在高采样模式下,AD7862的转换时间为3.6微秒(在自动睡眠模式下为6微秒),跟踪/保持采集时间为0.3微秒。为了从部件获得最佳性能,在转换期间或在下一次转换之前的300 ns期间不应发生读取操作。这允许部件以高达250 kHz的吞吐量运行,并达到数据表规范。
轨道/保持段
AD7862上的跟踪/保持放大器允许ADC将满标度振幅的输入正弦波精确地转换为12位精度。磁道/保持的输入带宽大于adc的奈奎斯特速率,即使adc以其250 kHz的最大吞吐量速率工作(即,磁道/保持可以处理超过125 kHz的输入频率)。
跟踪/保持放大器在小于400 ns的时间内将输入信号采集到12位精度。跟踪/保持的操作对用户基本上是透明的。双轨/保持放大器在康斯特下降沿。轨迹/保持的光圈时间
(即,外部convst信号和实际进入保持的轨道/保持之间的延迟时间)通常为15ns,并且更重要的是,在一个设备上的两个轨道/保持之间是良好匹配的,并且在设备之间也是良好匹配的。这使得不同输入通道之间的相对相位信息得以准确地保留。它还允许多个ad7862s同时采样两个以上的信道。转换结束时,零件返回其跟踪模式。此时开始跟踪/保持放大器的采集时间。
参考章节
AD7862包含一个标号为VREF的单参考管脚,该管脚可提供对零件自身+2.5 V参考电压的访问,也可连接外部+2.5 V参考电压,为零件提供参考电压源。该部件规定为+2.5 V参考电压。参考源中的错误将导致AD7862传输函数中的增益错误,并将添加到零件上指定的满标度错误中。在AD7862-10和AD7862-3上,它还将导致在衰减器级注入偏移误差。
AD7862包含一个片上+2.5V参考电压。要将此参考用作AD7862的参考源,只需将0.1μf盘状陶瓷电容器从VREF引脚连接到AGND。此引脚上出现的电压在应用到ADC之前在内部缓冲。如果需要在AD7862外部使用该基准,则应将其缓冲,因为该部件具有与基准输出串联的FET开关,从而导致该输出的源阻抗为3 kΩ标称值。在25°C时,内部参考的公差为±10 mV,典型温度系数为25 ppm/℃,最大温度误差为±25 mV。
如果应用程序需要具有更严格公差的参考或AD7862需要与系统参考一起使用,则用户可以选择将外部参考连接到此VREF管脚。外部参考将有效地驱动内部参考,并为adc提供参考源。参考输入在应用于最大输入电流为±100μA的ADC之前被缓冲。AD7862的合适参考源包括AD680、AD780和REF43精度+2.5 V参考源。
电路描述模拟输入部分
AD7862分为三种类型:AD7862-10,处理±10 V输入电压范围;AD7862-3,处理±2.5 V输入电压范围;AD7862-2,处理0 V至+2.5 V输入电压范围。
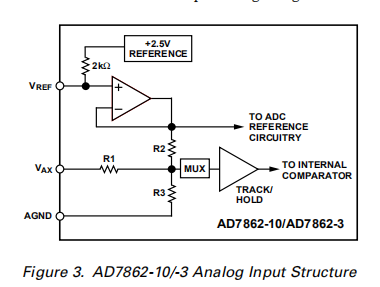
图3显示了AD7862-10和AD7862-3的模拟输入部分。AD7862-10的模拟输入范围为±10 V,输入电阻通常为33 kΩ。AD7862-3的模拟输入范围为±2.5 V,输入电阻通常为12 kΩ。该输入是良性的,没有动态充电电流,因为电阻级之后是跟踪/保持放大器的高输入阻抗级。对于AD7862-10,r1=30 kΩ,r2=7.5 kΩ,r3=10 kΩ。对于AD7862-3,r1=r2=6.5 kΩ,r3开路。
对于ad7862-10和ad7862-3,设计的代码转换发生在连续整数lsb值(即,1 lsb、2 lsb、3 lsb)上。..)输出编码是两个互补二进制,lsb=fs/4096。AD7862-10和AD7862-3的理想输入/输出传递函数如表1所示。
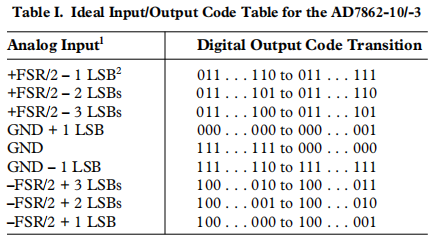
1FSR满标度范围=20 V(AD7862-10)和=5 V(AD7862-3),参考电压为+2.5 V。
21 LSB=FSR/4096=4.883 mV(AD7862-10)和1.22 mV(AD7862-3),参考电压为+2.5 V。
AD7862-2的模拟输入部分不包含偏置电阻,VAX/BX引脚直接驱动多路复用器和轨道/保持放大器电路的输入。在输入电流小于500na的高阻抗级中,模拟输入范围为0v到+2.5v。这个输入是良性的,没有动态充电电流。再次,设计的代码转换发生在连续的整数lsb值上。输出编码为直(自然)二进制,1 lsb=fs/4096=2.5v/4096=0.61mv。表II显示了AD7862-2的理想输入/输出传输函数。
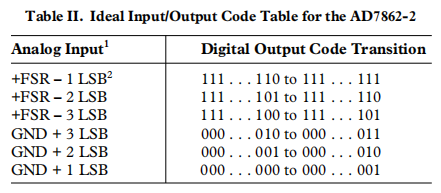
1FSR是满标度范围,对于VREF=+2.5 V的AD7862-2为2.5 V;21 LSB=FSR/4096,AD7862-2为0.61 mV,VREF=+2.5 V。
偏移和满刻度调整
在大多数数字信号处理(dsp)应用中,偏移量和满标度误差对系统性能影响很小或没有影响。通过交流耦合,可以消除模拟域中的偏移误差。满标度误差效应是线性的,只要输入信号在adc的全动态范围内,就不会引起问题。一些应用程序总是要求输入信号跨越整个模拟输入动态范围。在这种应用中,必须将偏移量和满标度误差调整为零。
图4显示了可用于调整AD7862上的偏移和满标度误差的电路(AD7862-10版本上的VA1仅用于示例目的)。当需要调整时,必须在满标度误差之前调整偏移误差。当输入电压低于模拟地1/2 lsb时,通过微调驱动ad7862的模拟输入的运算放大器的偏移量来实现。微调程序如下:在VA1(见图4)处施加-2.44 mV(–1/2 lsb)的电压,并调整运放偏移电压,直到ADC输出代码在1111 1111 1111和0000 0000 0000 0000之间闪烁。
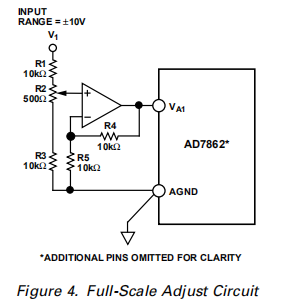
增益误差可以在第一次代码转换(ADC负满标度)或最后一次代码转换(ADC正满标度)时调整。两种情况下的修整程序如下:
正满标度调整
在VA1处施加+9.9927 V的电压(fs/2–3/2 lsbs)。调整r2,直到adc输出代码在0111111111110和0111111111之间闪烁。
负满标度调整
在VA1处施加-9.9976 V(–fs+1/2 lsb)的电压,并调整R2,直到ADC输出代码在1000 0000和1000 0000 0001之间闪烁。
在使用外部基准的系统中,调整满标度误差的另一种方案是调整vref管脚处的电压,直到调整出任何通道的满标度误差为止。通道的良好满标度匹配将确保其他通道的小满标度误差。
时间和控制
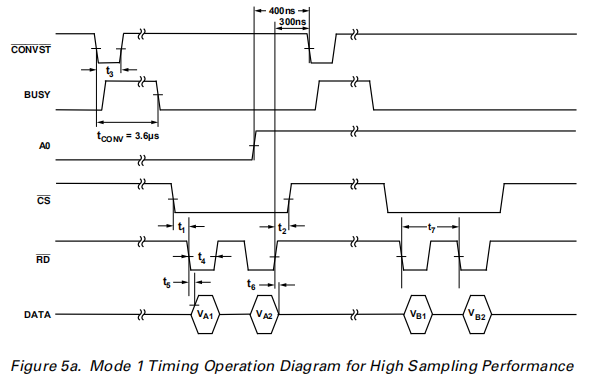
图5a显示了从ad7862获得最佳性能(模式1)所需的时序和控制顺序。按照所示顺序,在下降沿开始转换弗斯特的这将同时将两个磁道/保持置于保持状态,并且来自该转换的新数据可在随后的ad7862 3.6μs的输出寄存器中获得。忙碌信号表示转换结束,此时可读取两个输入的转换结果。然后启动第二个转换。如果多路复用器选择a0低,则第一转换后的第一和第二读取脉冲访问来自信道a的结果(分别为va1和va2)。第三和第四读取脉冲在第二转换和a0高之后,访问来自信道b的结果(分别为vb1和vb2)。A0状态可以在convst升高后随时更改,也就是说,在下一次坠落前400 ns convs的边缘。通过12位从零件读取数据带有标准CS和RD信号的并行数据总线,即,读取操作包括CS引脚上的负向脉冲和RD引脚上的两个负向脉冲(同时CS低),访问两个12位结果。一旦执行读取操作,应允许再执行300 ns在convst的下一个下降沿开始下一个转换之前,优化跟踪/保持放大器的设置。当内部时钟频率达到最大值(外部无法访问3.7兆赫)时,部件的可实现吞吐量为3.6微秒(转换时间)加上100纳秒(读取时间)加上0.3微秒(采集时间)。这导致最小吞吐量时间为4微秒(相当于250 kHz的吞吐量速率)。
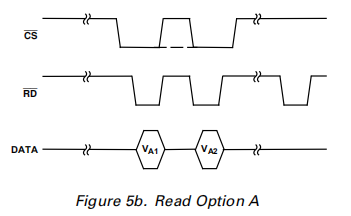
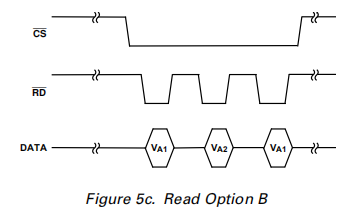
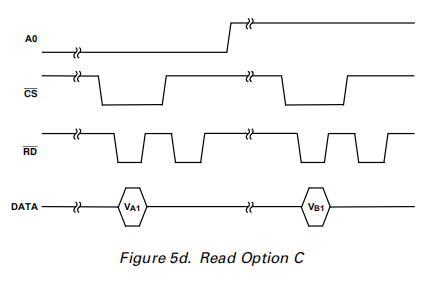
读取选项,除了上述的读取操作和显示在图5a,其他cs和rd组合可导致以不同组合读取不同信道/输入。适当的组合如图5b至5d所示。
工作模式
模式1操作(高采样性能)图5a中的时序图用于运行模式1,convst下降沿开始转换,并将轨道/保持放大器置于其保持位置模式。convst的这个下降沿还导致忙碌信号变高,以指示正在进行转换。转换完成时,忙音信号变低,在convst下降沿之后最大为3.6μs,并且从该转换得到的新数据可在ad7862的输出锁存器中获得。读取操作访问此数据。如果多路复用器选择a0低,则第一转换后的第一和第二读取脉冲访问来自信道a的结果(分别为va1和va2)。第三和第四个读取脉冲,在第二个之后转换和a0高,访问通道B的结果(分别为vb1和vb2)。通过带有标准CS和RD信号的12位并行数据总线从零件读取数据。这些数据读取操作包括CS引脚上的负向脉冲和RD引脚上的负向脉冲;重复两次将访问两个12位结果。以获得最快的吞吐量速率(内部时钟为3.7兆赫),读取操作需要100纳秒。读取操作必须至少完成300 ns在下一个convst的下降沿之前,这将为整个吞吐量时间(相当于250 kHz)提供4微秒的总时间。这种操作模式应用于高采样应用。
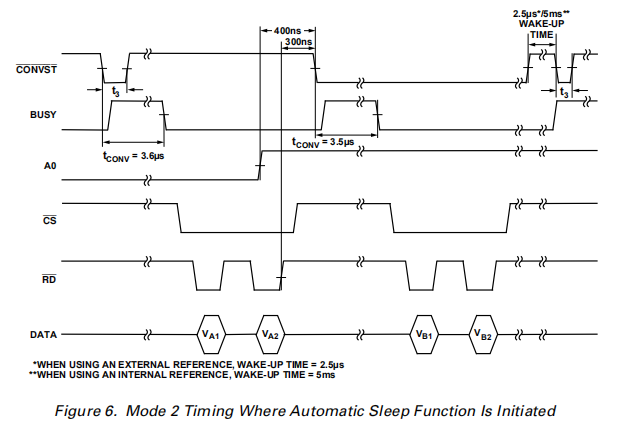
模式2操作(转换后自动休眠)
图6中的时序图是为了在工作模式2下获得最佳性能,在转换后,一旦忙变低,部件自动进入睡眠模式,并在下一次转换之前“唤醒”。这是通过保持在第二次转换结束时转换为低,而在模式1操作的第二次转换结束时转换为高。图6所示的操作显示了如何从通道A和B访问数据,然后是自动睡眠模式。还可以设置定时,以便仅从通道A或通道B访问数据(请参阅上一页的“读取选项”部分),然后进入自动睡眠模式。上升沿康斯特“唤醒”了这个角色。使用外部基准时,唤醒时间为2.5微秒;使用内部基准时,唤醒时间为5毫秒,此时跟踪/保持放大器开始工作进入他们的保持模式,前提是convst已变低。转换后需要3.6微秒,从上升沿开始总共6微秒(外部参考,内部参考5.0035毫秒)从convst到转换完成,这由busy going low表示。注意,自从醒来从convst上升沿开始的时间为2.5μs,如果convst脉冲宽度大于2.5μs,则转换时间将大于6μs(2.5μs唤醒时间+3.6μs转换时间)如图所示,从convs的上升沿开始。这是因为轨道/保持放大器进入其保持模式convst的下降沿,并且转换在3.6微秒内不会完成。在这种情况下,忙碌将是转换完成时的最佳指示。尽管部件处于睡眠模式,仍然可以从部件读取数据。读取操作与模式1操作相同,并且必须在下一个convst允许跟踪/保持放大器有足够的时间来稳定。此模式在转换零件时非常有用-在一个缓慢的速率,因为功率消耗将大大减少,从模式1的运作。
动态规格
AD7862是指定的,100%测试动态性能规范以及传统的直流规范,如积分和微分非线性。这些交流规范是相控阵声纳、自适应滤波器和频谱分析等信号处理应用所必需的。这些应用需要有关ADC对输入信号光谱含量影响的信息。因此,指定ad7862的参数包括snr、谐波失真、互调失真和峰值谐波。这些术语将在以下各节中详细讨论。
信噪比
snr是在模数转换器。信号是基波的有效值大小。噪声是所有非基本信号的均方根和,不包括直流电,其最大值为采样频率(fs/2)的一半。信噪比取决于-在数字化过程中使用的量化级别的数量减少;级别越多,量化噪声越小。正弦波的理论信噪比
输入由
信噪比=(6.02N+1.76)dB(1),其中N是位数。因此,对于理想的12位转换器,信噪比为74分贝。
2.5微秒*/5毫秒**唤醒
图7显示了使用5 V电源的AD7862对直流输入进行8192次转换的直方图。模拟输入设置在代码转换的中心。可以看出,所有的代码都出现在一个输出箱中,这表明adc具有非常好的噪声性能。
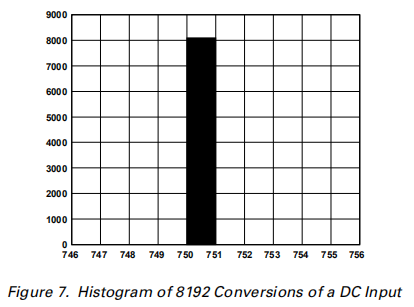
图8中显示的数据与图7中显示的数据相同,只是在这种情况下,在转换过程中会出现为设备读取的输出数据。这会在进行位决策时将噪声注入模具,从而增加AD7862产生的噪声。同一直流输入8192次转换的柱状图现在显示了更大的代码分布。这一效果将取决于串行时钟边缘相对于转换过程的位试验出现的位置。根据串行时钟边缘与位试用点的关系,在转换期间读取时可能达到与在转换之后读取时相同的性能水平。
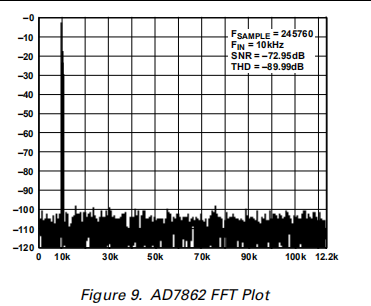
通过对以245.76khz采样率采样的vax/bx输入应用非常低失真的正弦波信号来评估adc的输出频谱。生成一个快速傅里叶变换(fft)图,从中可以获得信噪比数据。图9显示AD7862的典型2048点FFT图,输入信号为10 kHz,采样频率为245.76 kHz。由该图得到的信噪比为72.95db。在计算信噪比时应考虑谐波。
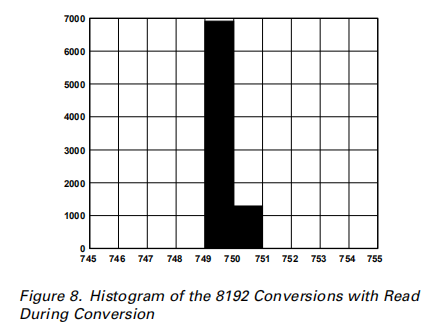
图8.8192次读取转换的柱状图-转换期间
有效位数
方程1中给出的公式将信噪比与比特数联系起来。重写公式,如在等式2中,可以得到以有效比特数(n)表示的性能度量。
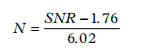
一个设备的有效位数可以直接从其测量的信噪比计算出来。
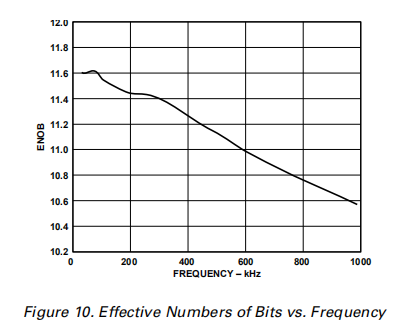
图10显示了采样频率为245.76 kHz的AD7862BN的有效比特数与频率的典型关系图。有效位数通常介于11.6和10.6对应于71.59分贝和65.57分贝的信噪比数字。
总谐波失真(THD)
总谐波失真(thd)是谐波的均方根和基波的均方根值之比。对于AD7862,THD定义为

其中,v1是基波的均方根振幅,v2、v3、v4和v5是二次谐波至六次谐波的均方根振幅。thd也由adc输出频谱的fft图导出。
互调失真
当输入由两个频率(fa和fb)的正弦波组成时,任何具有非线性的有源器件都会在mfa±nfb的和频和差频产生畸变产物,其中m,n=0,1,2,3。……等。互调项是指m或n都不等于零的互调项。例如,二阶项包括(fa+fb)和(fa-fb),三阶项包括(2fa+fb),(2fa-fb),(fa+2fb)和(fa-2fb)。
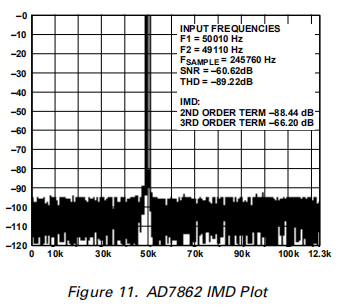
使用ccif标准,其中使用接近输入带宽顶端的两个输入频率,二阶和三阶项具有不同的重要性。二阶项通常在频率上与原始正弦波相距较远,而三阶项通常在接近输入频率的频率上。因此,二阶和三阶术语是分开指定的。互调失真的计算是根据thd规范进行的,其中它是单个失真产品的rms和与以dbs表示的基波的rms振幅的比值。在这种情况下,输入由两个等幅低失真正弦波组成。图11显示了AD7862的典型IMD图。
峰值谐波或杂散噪声
谐波或杂散噪声被定义为adc输出频谱中下一个最大分量(最高fs/2,不包括dc)的均方根值与基波的均方根值之比。通常,本规范的值将由频谱中最大的谐波确定,但对于谐波埋入噪声层的部分,其峰值将是噪声峰值。
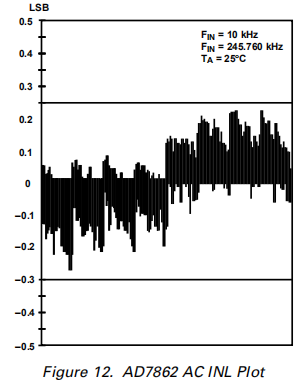
交流线性图
当对ad7862的vin输入施加指定频率的正弦波,并且采集数百万个样本时,可以生成显示4096 adc码中每个码的出现频率的直方图。从该直方图数据,可以生成如图12所示的ac积分线性图。这显示了AD7862在10 kHz输入频率下非常好的积分线性性能。图中无大峰值显示良好的差分线性。所用公式的简化版本概述如下。
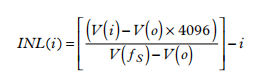
其中inl(i)是代码i处的积分线性度。v(fs)和v(o)是估计的满标度和偏移跃迁,v(i)是第i个代码的估计跃迁。V(i)估计的代码转换点导出如下:
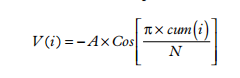
其中a是峰值信号幅度,n是直方图样本数:
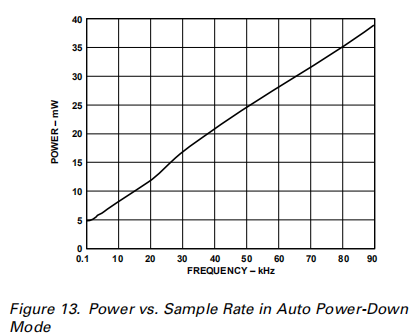
功率因素
在自动断电模式下,部件可在远小于200 kHz的采样率下工作。在这种情况下,功耗将降低,并取决于采样率。图13显示了自动断电模式下从100赫兹到90千赫的功耗与采样率的关系图。条件是5 V电源25°C,转换后读取数据。
微处理器接口
AD7862高速总线定时允许直接连接到DSP处理器以及现代16位微处理器。适当的微处理器接口如图14至18所示。
AD7862–ADSP-2100接口,图14显示了AD7862和ADSP-2100。convst信号可以由adsp-2100或外部电源提供。当在所有四个信道上完成转换时,ad7862占线向adsp-2100提供中断。然后,可以使用对相同存储器地址的四次连续读取从ad7862读取四个转换结果。以下指令读取四个结果中的一个(此指令重复四次以按顺序读取所有四个结果):
其中mr0是adsp-2100 mr0寄存器,adc是ad7862地址。
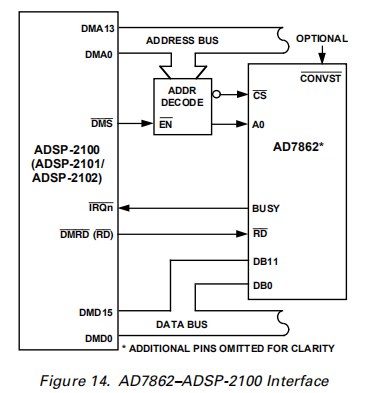
AD7862–ADSP-2101/ADSP-2102接口
图14中概述的接口也构成了AD7862和ADSP-2101/ADSP-2102之间接口的基础。ADSP-2101/ADSP-2102的读取线标记为RD。在这个接口中,处理器的rd脉冲宽度可以使用数据存储器等待状态控制寄存器进行编程。ADSP-2100概述了用于读取四个结果之一的指令。
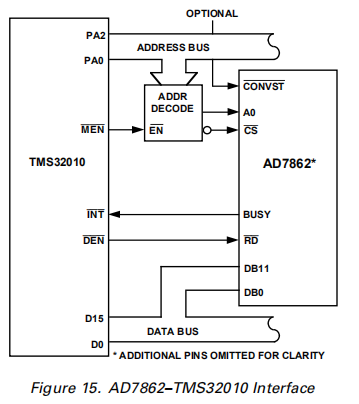
AD7862–tms32010接口显示了AD7862和tms32010之间的接口在图15中。再次,convst信号可以从tms32010或外部源提供,并且当两个转换完成时,tms32010被中断。以下指令用于从AD7862读取转换结果:在D、ADC中其中d是数据存储器地址,adc是ad7862地址。
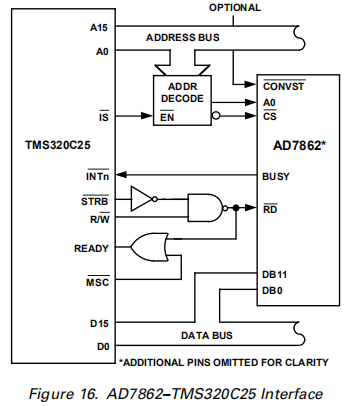
AD7862–tms320c25接口
图16显示了AD7862和tms320c25之间的接口。与前两个接口一样,可以从tms320c25或外部源启动转换,并且当转换序列完成时,处理器被中断。tms320c25没有单独的rd输出直接驱动ad7862rd输入。这必须由处理器strb和r/w输出生成,并添加一些逻辑门。rd信号与msc信号一起被选通,以提供正确接口定时所需的读取周期中的一个等待状态。使用以下指令从AD7862读取转换结果:在D、ADC中其中d是数据存储器地址,adc是ad7862地址。
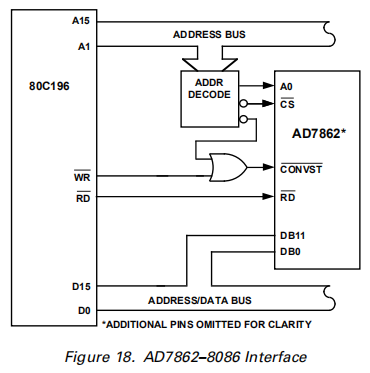
有些应用可能要求由微处理器而不是外部计时器启动转换。一种选择是从地址总线解码AD7862转换器,以便写入操作开始转换。数据像以前一样在转换序列的末尾读取。图18显示了使用此方法启动转换的示例。注意,对于所有接口,最好不要在转换期间尝试读取操作。
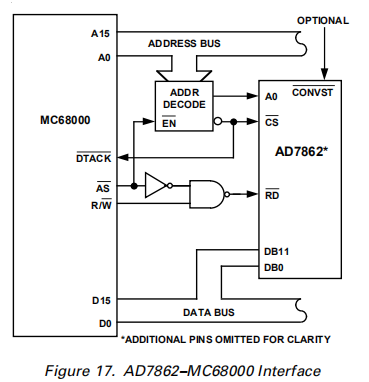
AD7862–MC68000接口
AD7862和MC68000之间的接口如图17所示。与以前一样,可以从MC68000或外部源提供转换。AD7862占线可用于中断处理器,或者,软件延迟可确保在尝试读取AD7862之前已完成转换。由于其中断的性质,68000需要额外的逻辑(图18中没有显示)来允许它被正确中断。
MC68000 AS和R/W输出用于生成分离AD7862的RD输入信号。cs用于驱动68000 dtack输入,以允许处理器对ad7862执行正常的读取操作。使用以下68000指令读取转换结果:移动adc,d0。其中,d0是68000 d0寄存器,adc是ad7862地址。
AD7862–80C196接口
图18显示了AD7862和80C196微处理器之间的接口。在这里,微处理器启动转换。这是通过将80C196 wr信号与解码地址输出(不同于AD7862 CS地址)选通来实现的。AD7862占线用于在转换序列完成时中断微处理器。
矢量马达控制
电动机的电流可以分成两部分:一部分产生转矩,另一部分产生磁通量。为了使电动机达到最佳性能,这两个部件应该独立控制。在控制三相电动机的传统方法中,提供给电动机的电流(或电压)和驱动器的频率是基本的控制变量;然而,转矩和磁通量都是电流(或电压)和频率的函数。这种耦合效应会降低电机的性能,因为如果通过增加频率来增加转矩,例如磁通趋于减小。
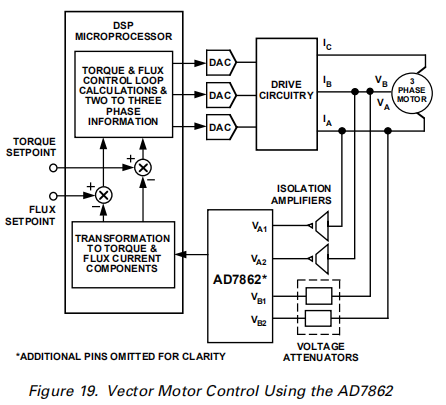
交流电动机的矢量控制除了驱动和电流频率外,还包括控制相位。控制电机的相位需要转子相对于电机内旋转磁场位置的反馈信息。利用这一信息,矢量控制器数学地将三相驱动电流转换为单独的转矩和磁通分量。AD7862具有四通道同时采样能力,非常适合用于矢量马达控制应用。
使用AD7862的矢量马达控制应用程序的框图如图19所示。磁场的位置是通过确定电动机每相的电流来确定的。只需要测量两相电流,因为如果两相已知,则可以计算第三种电流。AD7862的VA1和VA2用于将此信息数字化。
同时采样对于保持两个通道之间的相对相位信息至关重要。电机和AD7862之间使用电流感应隔离放大器、变压器或霍尔效应传感器。转子信息是通过测量电机两个输入端的电压获得的。AD7862的VB1和VB2用于获取此信息。同样,两个通道的相对相位也很重要。利用dsp微处理器对ad7862反馈的信息进行数学变换和控制回路计算。
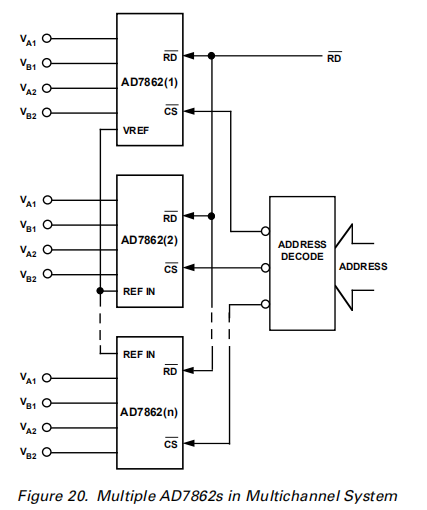
多个AD7862S
图20显示了一个系统,其中可以配置多个AD7862S来处理多个输入通道。这种结构在声纳、雷达等应用中很常见。AD7862具有典型的孔径延迟限制。这意味着用户知道所有通道之间采样瞬间的差异。这允许用户维护不同通道之间的相对相位信息。
来自微处理器的公共读取信号驱动所有ad7862s的rd输入。每个ad7862被指定一个由地址解码器选择的唯一地址。AD7862数字1的参考输出用于驱动图20所示电路中所有其他AD7862s的参考输入。一个VREF引脚可以驱动多个AD7862参考输入引脚。或者,可以使用外部或系统参考来驱动所有VREF输入。一个共同的参考确保所有通道之间良好的全尺寸跟踪。