AD603点击型号即可查看芯片规格书
目录
| 1.时变增益放大器的设计 |
| 2.时变增益放大器调零电路的设计 |
| 3.实测结果 |
| 结语 |
探地雷达(GPR,ground penetrating
radar)以其无损探测特性在很多领域得到了广泛的应用,其探测原理是:利用天线向地下发射高频宽带电磁波,然后接收来自地下介质界面的反射回波,通过对回波信号的处理和分析,推断地下介质的结构。而冲击型探地雷达以其结构简单,携带的回波信息丰富等特点受到了广泛的重视。以下所涉及的探地雷达均指冲击型探地雷达。
由于传播路径上的急剧损耗,使得天线接收到的回波信号动态范围极大,一般可达150dB。雷达接收系统中A/D转换器的动态范围一般只能达到80~90dB,难以满足雷达系统的要求。同时,由于深层目标回波幅度小,如不对其处理将严重影响探地雷达的探测深度和分辨率。为提高雷达的探测深度和分辨率,同时提高接收系统的动态范围,为此,本文采用AD603设计了一时变增益放大器对回波信号进行处理,通过对不同时间的回波信号给以不同的增益来补偿A/D转换器的动态范围的不足,达到与回波信号动态范围相匹配的目的。
所谓时变增益放大器简而言之就是放大器的增益是时间的函数。由于在探地雷达系统中,时间实际对应着目标离天线的距离,从这个角度讲,在雷达系统中,它可以称为距离增益放大器。其作用机理就是对近距离目标的散射回波采用衰减或较低增益放大,而对远距离目标的散射回波采用较高增益放大,使进入到数据采集电路的回波信号变得相对平稳。最终浅层目标回波的强信号被衰减或抑制,避免了放大器发生饱和过载或者放大器输出超出A/D转换器的输入范围;深层目标回波的弱信号得到有效放大,以保证目标信号的获取和辨别。
设计时变增益放大器的方案有很多种,鉴于探地雷达系统的要求,本文采用美国Analog Devices公司生产的新型压控放大器AD603来实现时变增益放大器,AD603具有低噪声、宽频带、增益和增益范围可调整、增益值(dB)随外部控制电压线性变化、带宽不随增益变化等优点,完全能够满足雷达系统的要求。其原理图如图1所示。
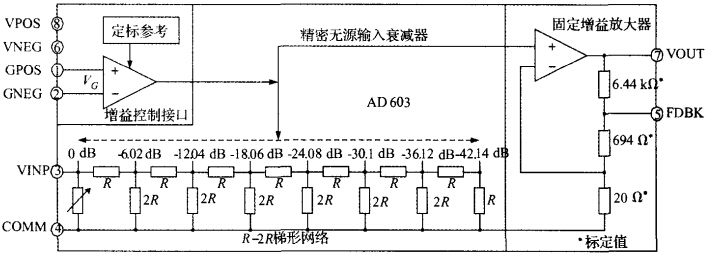
图1 AD603原理图
从原理图可以看出AD603的内部结构分成3个功能区:增益控制区;无源输入衰减区;固定增益运放区。增益控制区的控制电压控制衰减器的连续衰减。就像使图中固定增益运放同相端的箭头在0~-42.14dB之间滑动一样。AD603的增益范围、频带宽度由VOUT与FDBK的连接方式确定。当VOUT与FDBK短接,增益范围为一10~30dB,频带宽度为90MHz;当输出端VOUT与反馈端FDBK间接2.15kΩ电阻.反馈端FDBK通过5.6pF接地时,增益范围为0~40dB,频带宽度为30MHz;当VOUT与FDBK开路,反馈端FDBK通过18pF接地时,增益范围为10~50dB,频带宽度为9MHz。一旦增益范围确定以后,整个放大器的频带宽度也就确定下来.并且在增益变化范围内,带宽不随增益的变化而变化。这是因为增益的调整是通过固定增益运放前的R一2R梯形电阻衰减网络实现的,而不是改变运放的反馈电阻,所以整个放大器的带宽不受增益调整的影响。
由于探地雷达回波信号的动态范围极大,为了对深层的微弱回波信号提供较大的增益,便于后续的数据采集与处理。具体实现时采用了两级AD603级联的方式实现可变增益放大,并且前后两级的增益范围均设置为0~40dB。这样,两级放大电路总共能提供0~80dB的可变增益范围,可以满足探地雷达扩展动态范围的需求。同时,为了尽可能提高两级放大电路的信噪比,降低前一级放大器产生的噪声被后一级放大器放大的可能性,两级放大器采用了顺序控制连接方式,电路原理如图2所示。
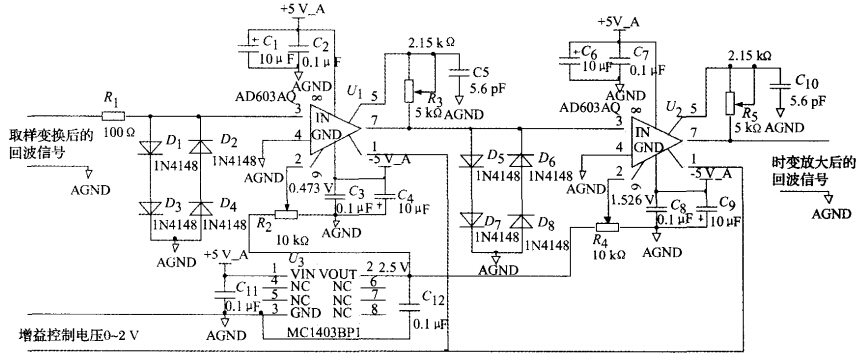
图2 可变增益放大电路原理图
为尽可能减少两级放大器级联以后的频带损失,改善放大器的低频响应特性,从而避免了探地雷达回波信号中的低频分量的损失,设计时选用了直接耦合方式。由于单级放大器的增益变化范围设置为0~40dB时.其带宽为30MHz。两级放大器级联以后,总的放大器3dB带宽会减小,此时的带宽约为21MHz,但提高了动态范围。
对于天线中心频率为100MHz的探地雷达,其回波信号的最高频率分量约为150MHz。假设发射脉冲重复频率为300kHz,采样时间间隔为0.1ns,可以得到等效采样变换后的回波信号最高频率分量为:

可以看出,采样变换后的信号最高频率分量远小于放大器的带宽,可以保证信号被放大以后没有频率失真。
经过实测发现,等效采样变换后的回波信号最大幅度约为土2.5V,而AD603的最大允许输入电压为±1.4V。如果将回波信号直接输入,会造成输出信号失真,严重时会造成AD603损坏,所以必须先对输入信号进行衰减。因为AD603的输入阻抗为100Q,所以在输入信号与AD603输入端之间串联一个100Q电阻R,构成一个1:1的电阻分压器对输入信号进行衰减。衰减后的信号最大幅度约为±1.25V,确保在AD603的允许输入电压范围内。考虑到在某些异常情况下,输入信号经衰减以后最大幅度仍然大于±1.4V,因此这里采用D1D2D3D4个二极管分别两两同向串联,然后反向并联于AD603输入端与模拟地之间。利用二极管的单向导电及PN结正向导通压降约为0.7V(对硅材料而言)的特性,对输入信号进行限幅,限幅后的信号最大幅度恰好约为土1.4V,满足AD603的输入电压要求。基于同样道理,在第2级AD603的输入端使用4个二极管D、D、D、D。对信号进行限幅,将其幅度限制在±1.4V以内。
由于AD603有大约20~30mV的输出失调电压(直流偏移电压),当两极AD603之间采用直接耦合方式时,前一级AD603的输出失调电压会被后一级AD603所放大。当后级增益较大时,放大后的回波信号直流电位会大大偏离零点,导致输出信号波形的上半周或下半周被削去一部分,产生严重的非线性失真。而且由于前级接收和取样门电路也会带来直流偏移电压,即第1级AD603的输入信号中就含有直流偏移成分,因此经两级放大电路放大以后的直流偏移会更加严重。基于以上原因,这里必须设计一个直流偏移调零电路对输出信号的直流电位进行调整,使输出信号幅度达到最大时不产生非线性失真。
由于AD603本身没有调零控制端,所以只能在第1级AD603之前再加一级直流偏移调零电路。具体设计时可考虑采用由运算放大器组成的反相加法放大器,在运放的反向输入端,通过另一输入回路输入一个直流电压,与输入的回波信号进行相加运算,抵消其中的直流偏移分量,而不会对回波信号本身产生影响,从而达到直流偏移调零的目的。当然,使用运放构成直流偏移调零电路还有另外一个原因,即由于AD603的输入阻抗很低(约为100Q),若直接与天线系统的取样保持电路的输出相连,可能会出现驱动电流不足的问题。而运算放大器的输入阻抗高,输出阻抗低。它连接于天线系统的输出与AD603的输入之间,可使前级取样保持电路输出不至于有过高的负载,还可输出足够大的电流驱动AD603,起到隔离和缓冲的作用,使前后级电路的阻抗达到匹配。图3为设计实现的直流偏移调零电路原理图。图中的运放采用了美国AnalogDevices公司生产的超低噪声、超低失真运算放大器AD797。
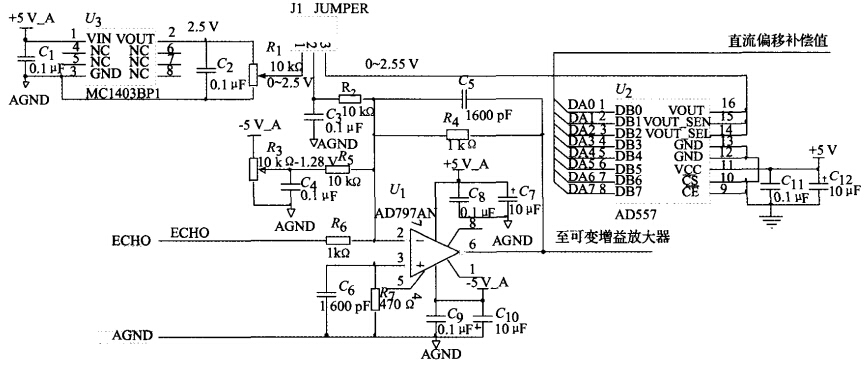
图3 可变增益放大器直流偏移调零电路原理图
该直流偏移调零电路的调整方式有2种:一种是手动调整方式,一种是自动调整方式。需要注意的是,这里的调零与普通运放的调零不同,不再是针对单级的调零,而是针对多级的调零,即对整个放大电路系统的输出进行直流电位补偿。在实际的雷达系统中,采用了自动调整方式进行调零。所谓自动调整方式,就是在正式数据采集之前的初始化阶段,由计算机根据预采集得到的回波信号数据,计算出其中的直流偏移量。然后将这个偏移量送到数模转换器(DAC,digital-to-analog converter),转换出的模拟电压就是直流偏移调零电路所需的直流电位偏移补偿电压。
当然在实际的使用模块中还包括有源滤波器和时变增益控制器的设计,由于篇幅的原因,在这里不对这2个模块作细致的描述。其中的时变增益控制器模块采用基于DSP和FPGA的设计方案,其流程如下:首先在PC机上设置好时变增益曲线,经过计算以后得到一个A扫描中的每个点的增益值大小。然后将这些增益值作为工作参数通过USB接口传递给雷达主机中的DSP。DSP收到这些参数后原样转发给FPGA。FPGA再将这些增益值存储起来。数据采集开始以后,FPGA在外同步信号的控制下,依次读出原先存储的增益值,并送至D/A转换器进行转换,得到一个随时间变化的电压信号。此信号的形状与PC机上设置的时变增益曲线基本一致。用此信号去控制可变增益放大器,即可以得到我们所需的时变增益。在实际的探地雷达的时变增益控制一般预先设定2个阈值判断电压,即设高阈值电压为2V,低阈值电压为1.8V,那么如果放大后的回波信号电压峰值大于2V,就判定为增益过高,要进行降低增益处理;如果放大后的回波信号电压峰值小于1.8V,就判定为增益过低,要进行提高增益处理。
采用上述设计思路所设计出的时变增益放大器被用于实际的雷达样机中,通过示波器观察到的时变增益放大后的回波信号如图4所示,从图示可以看出,它满足雷达系统的要求,回波信号幅度相对平稳,保证了目标信号的获取和识别。
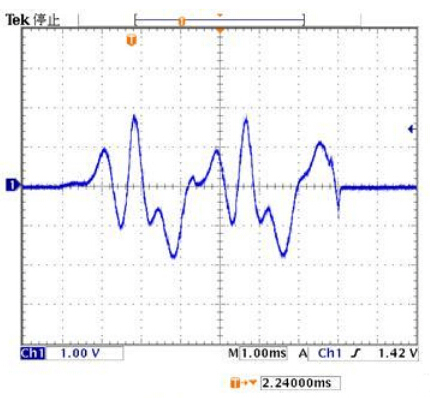
图4 时变增益放大后的回波信号
本文总结了基于AD603的时变增益放大器设计,并给出了详细的设计思想和原理电路图,经过实测结果表明,文中所设计的时变增益放大器能满足雷达系统的需求,具有很强的实用价值。
