AD590点击型号即可查看芯片规格书
目录
| 1.引言 |
| 2.工作原理 |
| 3.集成温度传感器AD590 |
| 4.测温电桥 |
| 5.PID调节器 |
| 6.程序设计 |
| 7.实验分析与结论 |
本文介绍了一种适用于实验室条件下实验、研究和二次开发的数字式温度测控装置。该器件采用新型集成温度传感器AD590作为温度测量元件,并提供两个控制单元进行实验比较。通过测量和控制恒温器中的温度,获得了令人满意的结果。
对于导弹武器和设备等大型系统,其性能往往受到外部环境和自身运行条件的影响。其中,温度的影响往往起着非常重要的作用。因此,温度检测和控制一直是许多研究者关注的焦点。然而,一些温度测控装置精度低,温度控制不准确,一些新仪器成本高,难以推广。特别要指出的是,过去开发的温度测控系统通常是一个独立的系统,一物一用,很难被其他系统采用,存在维护困难、维修不便等问题。为此,作者根据目前流行的模块化设计原理,开发了一种适用于实验室条件下研发的高精度温度测控装置。
图l为WCZ-98型温度测控装置的电气原理图。其工作原理为:以AD590为一桥臂的测温电桥采取到的温度信号,经差动放大并进行缓冲隔离后 一路送至数显表进行数字化温度显示,另一路与设定值相比较。比较出来的差值由开关K控制可选择送人两路调节控制器。其中一路由比较放大器和继电器组成,以此为调节控制器可使该装置形成一个无需与计算机相连的独立的测控温设备;另一路由PID调节器(由A/D、D/A与装有PID调节软件的计算机构成)和可控硅组成。从调节控制器出来 的信号通过控温执行元件实现温度控制。下面就其中几个部分的原理进行分析。
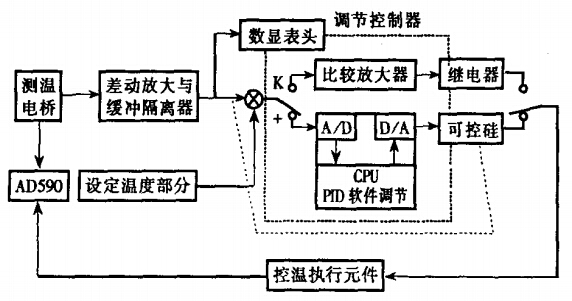
图1 温度测控装置电气原理

图2 AD590
AD590是美国AD公司生产的专用集成温度传感器,属于电流输出型。图2所示为AD590在三个不同温度下的电流一电压特性曲线。在一定温度范围内,它相当于一个高阻电流源,其电流温度灵敏度为lμA/K。它不易受接触电阻、引线电阻、电压噪声等的干扰。此外,它还具有体积小、测温精度高、线性好和互换性强等特点,非常适用于远距离测控,同时也适用于本文所要求的模块化、分体式结构的 特点。其主要技术指标为:
a.测温范围:一55.150℃;
b.电流输出(标定系数):lμA/K;
c.电源电压:直流4—30V;
d.线性度:在满量程范围内小于±0.5℃;
e.重复性:±0.1℃;
f.输出阻抗:约为10MQ;
g.长期漂移:±0.1℃/月
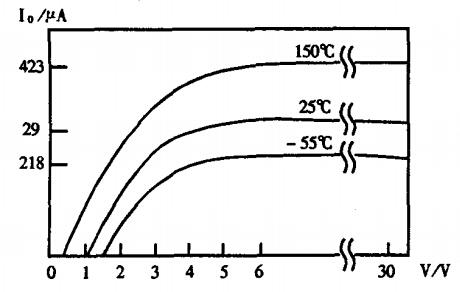
图3 AD590的I—V曲线
流经AD590的电流Ir是其所在环境的绝对温度的单值函数,且Ir的微安数就等于绝对温度值T,即:
Ir=T×10-6A=TμA (1)
图4为测温电桥原理图。流过AD590的电流IiR2和Rw2上形成的电压为:
Ul=Ii×(R2+Rw2) (2)
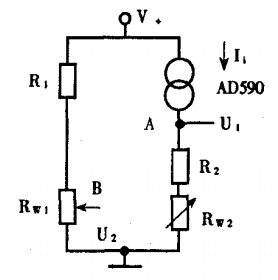
图4 测温电桥原理图
通过调节Rw2使(R2+Rw2)等于10K,将(1)式代入(2)式可得:
U1=Ii×(R2+Rw2)=T×10-2V (3)
通过调节Rwl使得U2=2.732V。那么电桥的输出就为:
UAB=U1﹣U2=T×10-2﹣2.732=(T﹣273.2)×10-2V (4)
因为T为AD590所测的环境绝对温度,将其减去273.2后,则可得到摄氏温度值t,即:
UAB=t×10-2V (5)
至此,测温电桥就将环境温度转化成了与摄氏温度值成正比的电压值。
温度测控装置的调节控制器中的一路采用了PID调节器(比例积分微分调节器),它能根据温度设定值与实际值之差的比例值、积分值、微分值来确定控制量的大小。温度测控装置采用的是输出反馈型控制,将这一部分从原理总图中抽取出来,就可得到如图5所示的PID调控原理图。图中Ud与U分别为恒温箱的设定值和实际值,误差e=Ud﹣KT,K为测量变换器的放大倍数,Y为PID输出的调节量。
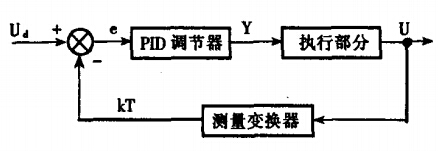
图5 PID调控原理图
PID算法的模拟表达式为:

式中,Y(t):调节器输出值;
e(t):输入偏差;
KP:调节器比例系数;
Tl、TD:词节器积分、微分时间
将(6)式进行离散化处理后,得PID增量控制算式:

式中,积分系数Kl=KPT/T1,微分系数KD=KPTD/r,T为采样周期。
再将(7)式进行Z变换,得:
在实验中,笔者用一个阶跃信号,粗测了在开环状态下的响应,由阶跃响应曲线得知恒温箱为一阶惯性环节加纯时滞环节,即:

求出系统的滞后时间r约为20秒,对象时间常数TP约为50秒。选择控制度为1.5,根据阶跃响应曲线整定参数法(参见文献[1]),求得:
T=0.34z=6.8s
Kr=0.85Tr,/r=2.125
T1=1.62r=32.4s
TD=0.65r=13s
将上述值代人(9)式,可求得:
q0=6.41
q1=-5.96
q2=4.06
则PID调节器的方程式为:

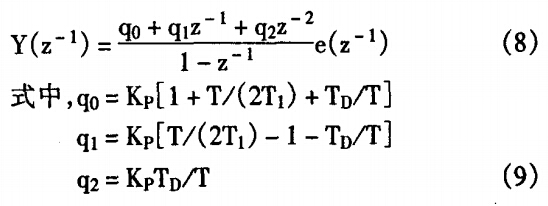
WCZ-98型温度测控装置的PID控制程序流 程如图5所示,其基本思想与一般的PID控制流程一样。这里不再赘述。
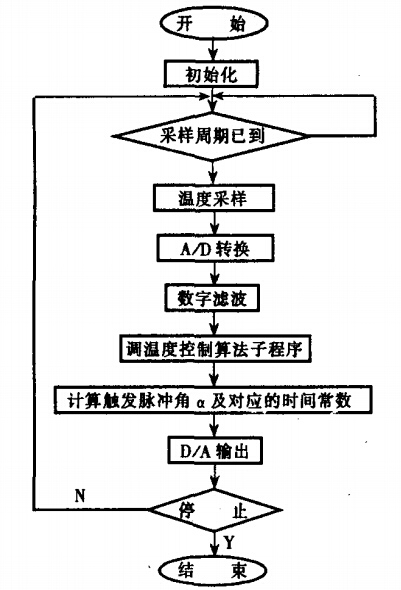
图6 PID控制程序流程图
将温度测控装置装入外形尺寸为248×208×262(mm)的恒温箱中。恒温箱采用50mm厚的聚苯乙烯作为隔热材料,以水为介质,加热装置由2支SRS3—220/0.5发热管及防漏电的辅助部件组成。恒温箱外可预置温度并有开关可选择调节控制器的种类。通过实验,将两种调节控制方式的控制效果进行比较,我们发现由比较放大器和继电器组成的调节控制器在温度控制过程中,温度不太平稳,总在一定误差范围内波动。而由PID调节器和可控硅组成的调节控制器控温性能非常好,以控温60℃为例,实验得出的温度变化曲线如图7所示。
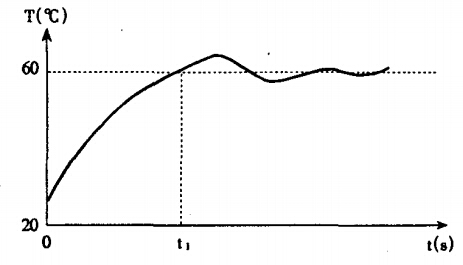
图7 PID控温实验结果曲线
由此可知,用模拟电路来进行调节控制,有利于将测控装置做成一个独立的仪器(不需要与计算机相连),其测控温精度能满足一般意义上的要求;而通过PID来控制,其测控温精度很高,将其与恒温箱和自行研制的SYZJX一2型实验转接箱配合使用,通过模拟量输入板PCL-818L、模拟量输出板PCL-726与计算机相连,可以实现高精度控温。
