3月18日,苹果公司在其官网公布了2020款11英寸与12.9英寸iPad Pro。最新款iPad Pro均搭载A12Z Bionic芯片与6GB运行内存,拥有128GB/256GB/512GB/1TB四种容量和银色、深空灰色两种颜色。
这一代iPad Pro 2020总体来说算是硬件规格上的小改,就连A12Z都可以认为是不同体质版的A12X。不过它在后摄上加入了一枚传说中的LiDAR激光雷达,苹果明确宣称这是一颗采用dToF技术的深度感知模块。需要明确的是,LiDAR就是一种采用ToF(Time of Flight)技术的3D感知应用,一般来说车载激光雷达多见dToF方法——后面我们将详述这种技术的本质。
TechInsights对外公开的拆解数据显示,这枚LiDAR所用的传感器像素阵列的分辨率是3万像素,尺寸4.18 x 4.30mm,单像素尺寸10μm,供应商是索尼[1]。这其中有几点是比较令人在意的,包括dToF技术、索尼的ToF图像传感器。
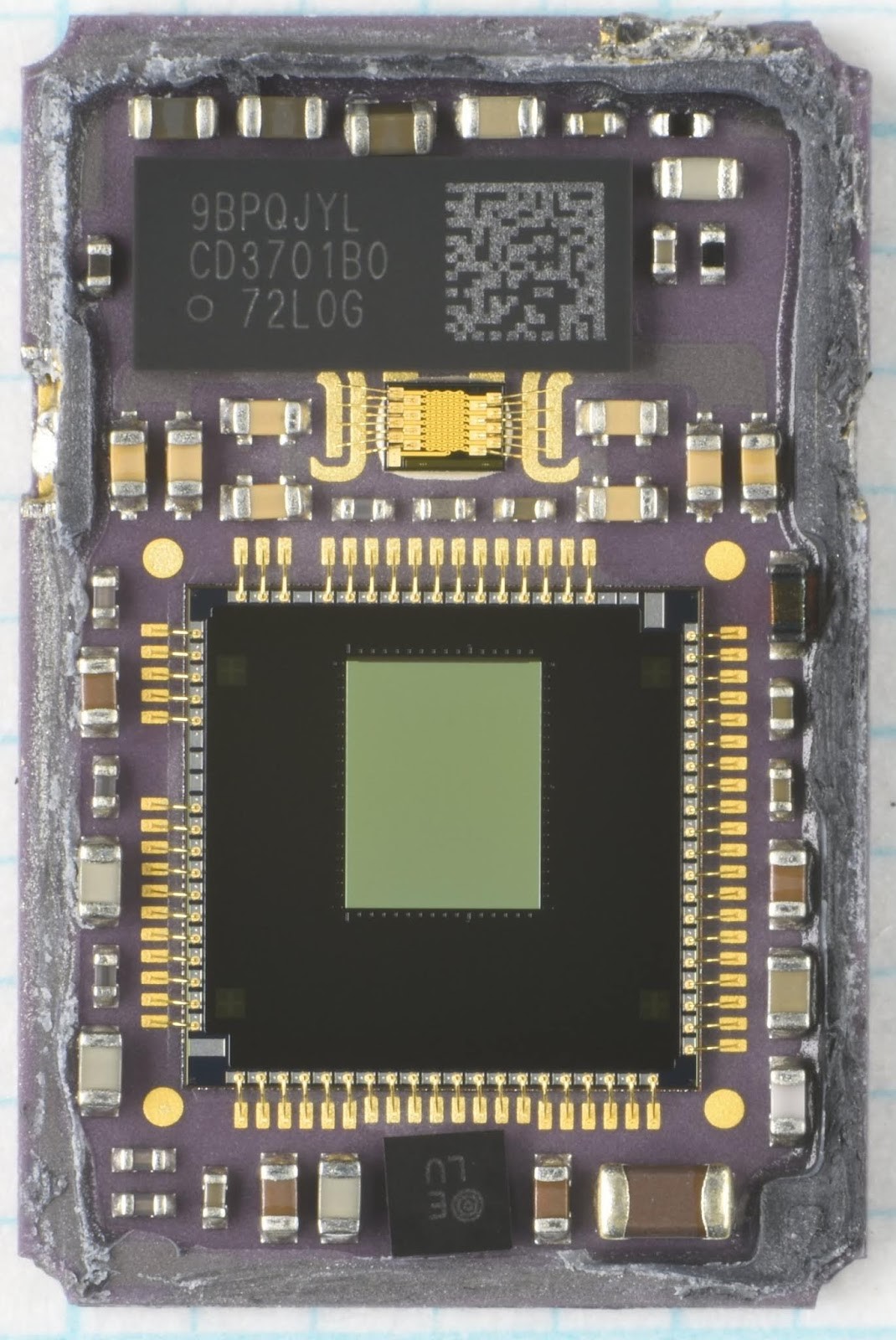
iPad Pro 2020的LiDAR内部,来源:TechInsights
虽然早在iPad Pro推出之际,就已经有许多媒体都提到,iPad Pro 2020采用的LiDAR接收端传感器,很可能是索尼或意法半导体的方案,TechInsights的拆解则坐实了索尼作为供应商的说法。但实际上,就已公开的资料来看,索尼并没有公开在售的dToF方法相关技术,当然并不排除其中存在的各种合作,或者索尼研究的新技术率先给苹果使用:这在以往也并非新鲜事。
事实上索尼虽然是传统摄像头CIS(CMOS图像传感器)业务的霸主,但这家公司过去并没有3D感知传感器方面的市场参与度。不过索尼2015年宣布收购一家比利时公司SoftKinetic:2017年这家公司改名为Sony DepthSensing Solutions(索尼深度感知解决方案)[2]。2019年,索尼的ToF传感器正式起步,索尼在3D感知传感器市场上,一跃成为市场份额达到45%的市场参与者。
索尼以往就有为苹果产品单独定制CIS图像传感器的传统,似乎为苹果专门定制ToF传感器也不奇怪。但索尼的DepthSense是一种十分典型的iToF方法应用(更具体地说,是一种cwToF,即连续波ToF方法),而不是dToF[4]。索尼当前比较知名的IMX556深度感知ToF传感器,单像素尺寸的确是10μm,但分辨率却有30万像素。
另一方面,意法半导体的SPAD传感器(通常应用于dToF技术的一种传感器)倒是很知名,但意法的这类传感器更着重于单点的距离检测,而并不在3D成像与感知应用上——虽然意法半导体的确有能力制造这种传感器,而且3D感知应用似乎也已经在计划表中,这一点我们也将在后文详述。这就让iPad Pro的这枚LiDAR多了一丝神秘的味道。
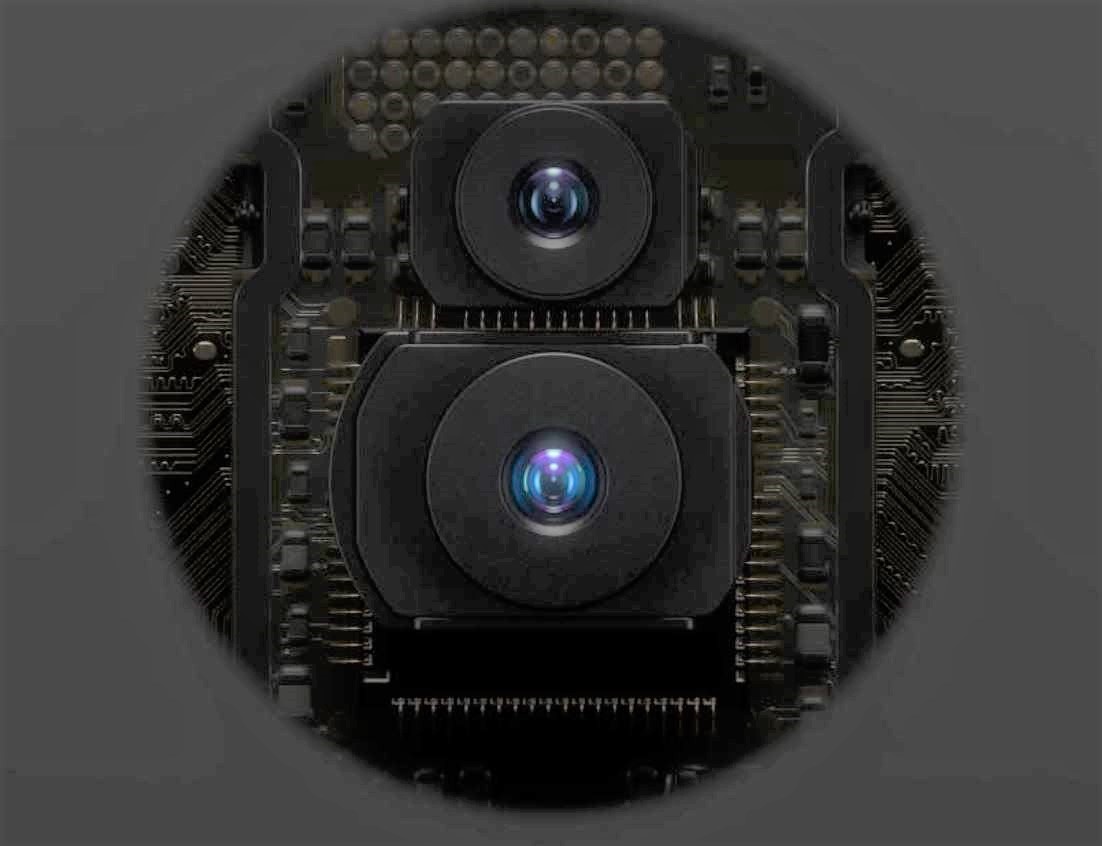
iPad Pro的LiDAR宣传图,很显然这张图表达的一个是发射端,一个是接收端,来源:苹果
针对上述问题,我们再展开来说一说,包括其中的各种概念,比如dToF、iToF、cwToF是什么,SPAD传感器又是什么,便于感兴趣的各位做更深入的分析和探讨。这篇文章或许无法解答一些问题,但期望通过对这些问题的探讨和呈现,引起更多的思考,及便于我们进行后续的研究和总结。
ToF技术近两年知名度在消费市场上骤升,很大程度上要归功于华为、vivo、OPPO、LG之类的品牌,都纷纷在其手机产品中开始采用ToF 3D感知技术。比如说华为P30 Pro,前置的ToF模块开始支持用户做隔空手势操作:在烹饪、吃饭这类不方便用手指直接接触屏幕的场景下,通过隔空手势就能完成翻页、滚屏之类的交互操作。
但事实上,很多消费用户不知道的是,ToF技术在手机产品中的应用要早得多,且普及程度还非常之广。自2014年开始,大部分旗舰手机的距离传感器(或接近传感器)都已经开始应用十分完整的ToF技术和硬件模块;iPhone 7也是苹果产品家族上,首次在距离传感器上采用了ToF技术的一款手机。
距离传感器也就是应用在手机前面板上,当用户接打电话、耳朵靠近屏幕时,屏幕就通过这枚距离传感器来自动息屏;当然距离传感器还能参与更多体验改善的功能特性。早年手机上的距离感应并不可靠,原因是早年的方案仅通过一枚简单的光电二极管,以光强度级感应来模拟这种距离感应。
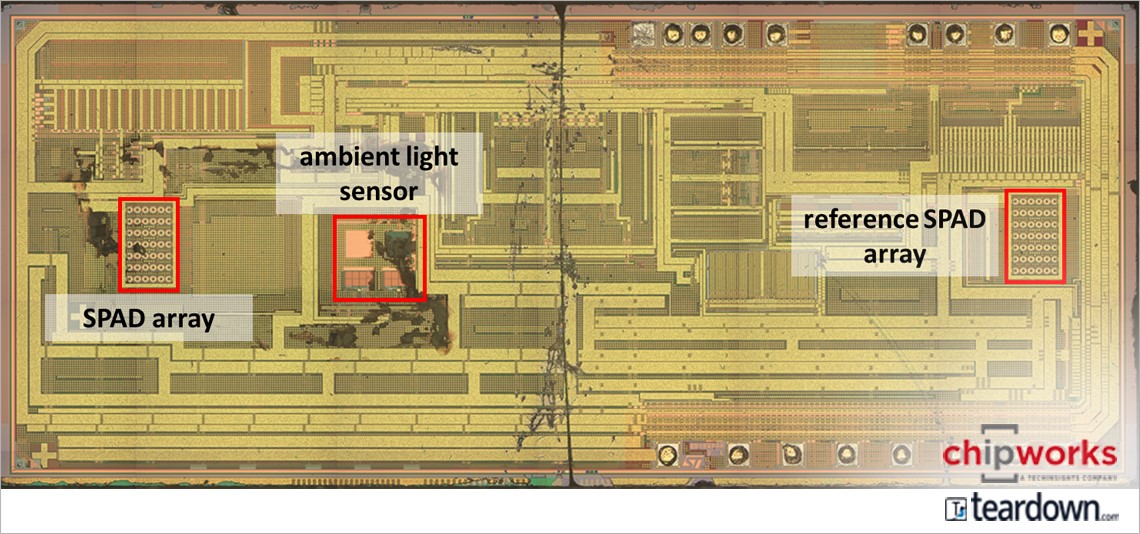
在魅族Pro 6、LG G5、华为P9等手机上普遍存在的意法半导体VL53L0B,来源:TechInsights
2014年,TechInsights的拆解显示,黑莓Passport、LG G3等手机的前置光学模组开始采用一种三合一的方案,即意法半导体的VL6180。这是一颗融合了距离传感器、环境光传感器、VCSEL(垂直腔面发射激光器)的光学模组。其中的距离传感器所用的就是SPAD(单光子雪崩光电二极管)阵列[3]。次年1月,意法半导体又发布了二代的VL53L0,开始广泛应用于当年的智能手机。
从结构来看,这里的距离感应方案,就是ToF技术的完整形态:即由VCSEL激光器首先主动发射红外光,在光子碰到障碍物对象(如凑近手机的耳朵或人脸)时返回,并由SPAD传感器接收到。在这个过程里,会有某种“计时电路”用于计量光从发出到返回全过程消耗的时间,那么在光速已知的前提下,就能精确地测得该对象到手机的距离——这就是ToF技术的一般原理。
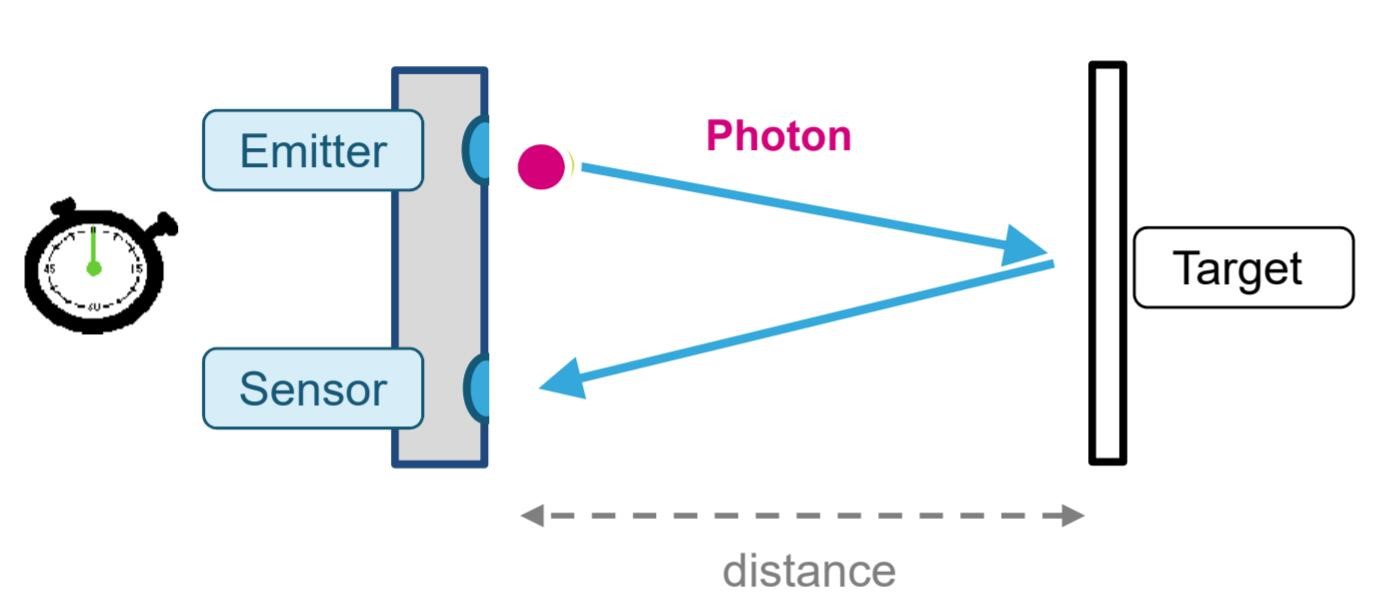
更准确地说,此处是由VCSEL发射端发出一个激光脉冲,接收端的SPAD传感器可以接收到反射的脉冲信号,通过计量时间即可测得距离信息。这就是dToF(直接ToF)方法的基本原理。意法半导体是dToF方法,在手机应用上耕耘比较久的一家厂商。实际上从2015年开始,手机几乎已经彻底铺开了这种利用dToF方法做前置单点光学距离检测技术。与此同时,后置摄像头的激光辅助对焦,利用的也是这种技术。
iPad Pro 2020在宣传上也提及后置LiDAR模块采用dToF方法。不过很显然,这两年ToF的应用已经不限于单纯的单点测距(以及环境光检测、接近检测、多区域检测等),而扩展到了由多点构成的3D成像与感知:即通过很多光点的发射与返回,感知整个场景的3D深度图,甚至实现3D视觉。
dToF是ToF实现方法中的其中一种,另一种就是iToF(间接iToF),有关iToF的部分我们后文再说。而dToF至少就原理来看还是比较直接、简单的,而且这种方法的收益也比较大。dToF基于脉冲调制光,工作周期可以比较短,即便采用更高的峰值输出功率,也可以兼顾人眼安全,探测距离也就能够比较远(这一点也相对适用于iToF中基于脉冲的pToF方法),同时还能兼顾相对比较好的测量精度[4]。加上dToF方法还具备可很大程度避免多径干扰(multipath effects)的问题,运动伪像对dToF产生的影响也比较小,看起来dToF理论上更理想。
不过实际上,dToF的实施难度要比iToF明显更大,虽然听起来其原理更简单。从ToF的实现原理来看,不难发现一个完整的ToF模组至少要包含发射端和接收端:发射端的主要部分就是光源(消费类ToF模组以VCSEL激光器为主),接收端的主体当然就是ToF图像传感器了。很容易想见,对于普通的p-i-n光电二极管来说,要直接、准确地测定光的“飞行时间”还是有相当难度的。它对于发射端的光源、接收端的光电探测器(即传感器),实现同步、时间检测相关电路都有着很高的要求。
dToF方法对于接收端的技术相对严苛,毕竟这种方法对时间抖动要求原本就很高:因为它接收的是一个脉冲信号,这就要求光电探测器的敏感度很高(以及快门时间窗口与脉冲信号的同步)。所以dToF方法所用的图像传感器常见APD(雪崩光电二极管),相比传统图像传感器的光电二极管,这种光电二极管有着明显更高的增益和量子效率,能够实现电子倍增(就像雪崩一样),或者说有着显著更高的敏感度。
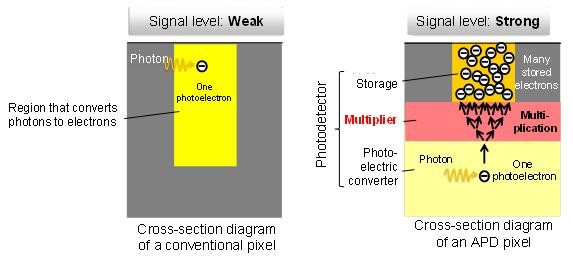
传统图像传感器光电探测器结构与APD图像传感器的比较,来源:Panasonic
除了APD之外,dToF中另外应用比较广泛的就是前文提到的SPAD(单光子雪崩二极管),它可以理解为比APD更敏感的一种结构,一个光生载流子就能触发大量雪崩电流——这两者都利用入射辐射触发p-n结的雪崩电流,不过SPAD设定了一个高于击穿电压的反向偏置电压,二极管可工作在所谓的Geiger-mode模式下。
另外SPAD通常采用像素内TDC(time-to-digital converter),能够直接产生数字触发信号。SPAD也具备更低的时间抖动,所以意法半导体这类厂商在消费产品中采用这种传感器技术。以松下为代表的APD传感器技术本身也在发展中。
另一方面,APD与SPAD像素和图像传感器比较难以小型化,这可能是与其设计电路相对复杂,包括淬火电路、像素内TDC在内的各种电路都需要占据较大的片上尺寸有关。意法半导体现有公开在售的SPAD图像传感器(FlightSense系列)就鲜有真正高像素的[5],且应用方向主要在测距,而非3D成像与感知——即便意法已经在朝着这个方向发展。意法半导体去年底才推出的VL53L5才开始逐步发力在多区域测距的“切割”,往3D感知方向发展。
既有的dToF高像素产品似乎也少有着力在手机这类紧凑型设备上的。实际上,我们从现有ToF图像传感器技术的制造工艺发展思路来看,意法半导体、松下、索尼这类厂商普遍在应用3D堆栈、背照式这样的技术(比如把原本位于光电二极管上方的布线层移至下方,或者将光电转换器、电子倍增器这些部分垂直堆叠起来),就跟当年传统摄像头的图像传感器一样想办法提高像素的开口率,缩小像素尺寸,尽可能做到更高的传感器2D分辨率。
松下今年2月份发布一种VAPD(垂直堆叠VAPD)传感器,像素数量达到了100万[6];瑞士洛桑联邦理工学院(EPFL)和佳能前几天才刚刚宣布达成全球最小的SPAD像素:2.2μm,加上3D堆叠,SPAD像素阵列可以达到数百万级别[7]。(与此可对比的是,三星当前已经商用的传统CIS传感器,单像素尺寸可达到0.7μm,而0.6μm也已经在研发中)


iPhone X的Face ID系统发射器发出的红外光点,与iPad Pro 2020的LiDAR发射端发出的红外光点数量比较,原理与技术上的差异,导致两者的光点密度差别很大,来源:iFixit[8]
不过这些技术至少现在并没有应用于移动设备的例子,如果说iPad Pro 2020的dToF方法应用的是SPAD传感器,则在这个设备尺寸以及5米测量距离内,而且还是消费型电子产品,SPAD传感器的3万像素或许着实称得上是高像素。
有关iPad Pro 2020是否采用SPAD传感器(TechInsights并未公开这部分分析信息),我们查到前两年苹果的一份专利储备,展示的就是一种3D感知系统,或者说就是ToF[9]。这个专利中提到了LiDAR相关技术——针对的就是消费领域的应用,包括VCSEL光源,而光电探测器选择的就是SPAD。“这种探测器能够以很高的时间抵达分辨率,在数十皮秒内捕获单独的光子”。
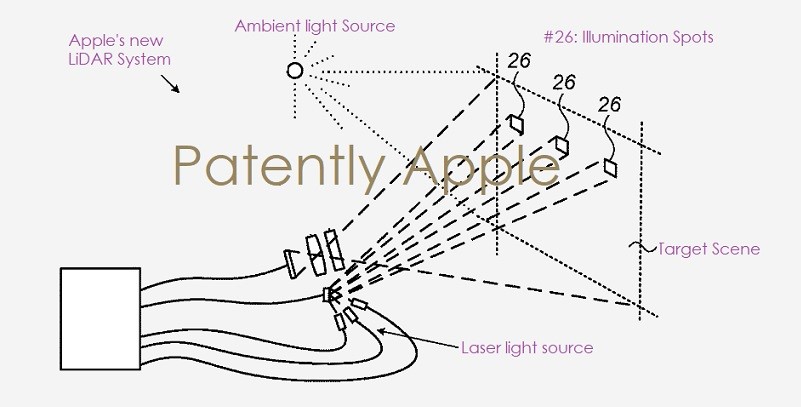
苹果一项有关LiDAR的专利,来源:Patently Apple
加上苹果已经在宣传中明言iPad Pro 2020的3D感知所用就是dToF方法,那么我们有理由猜测这可能就是个SPAD传感器。即便似乎从现有技术来看,整个LiDAR模组看起来还是比较奢侈和黑科技。不过前文提到TechInsights认为,这枚传感器来自索尼。问题是从我们查到的资料来看,索尼似乎并没有造SPAD传感器的历史,SoftKinetic的长项也在iToF,而非dToF。
如前文所述,索尼应用于iToF的传感器去年就已经开始统领手机市场了。三星和华为去年的手机旗舰,后摄3D ToF方案上都应用了索尼的ToF传感器方案,比如三星Galaxy Note 10+[10],如下图所示。其中右边部分接收端的传感器是来自索尼的IMX516,单像素尺寸5μm,分辨率480x640(30万像素,24.8mm²)——华为Mate 30 Pro的前置ToF模组也应用了这个方案。
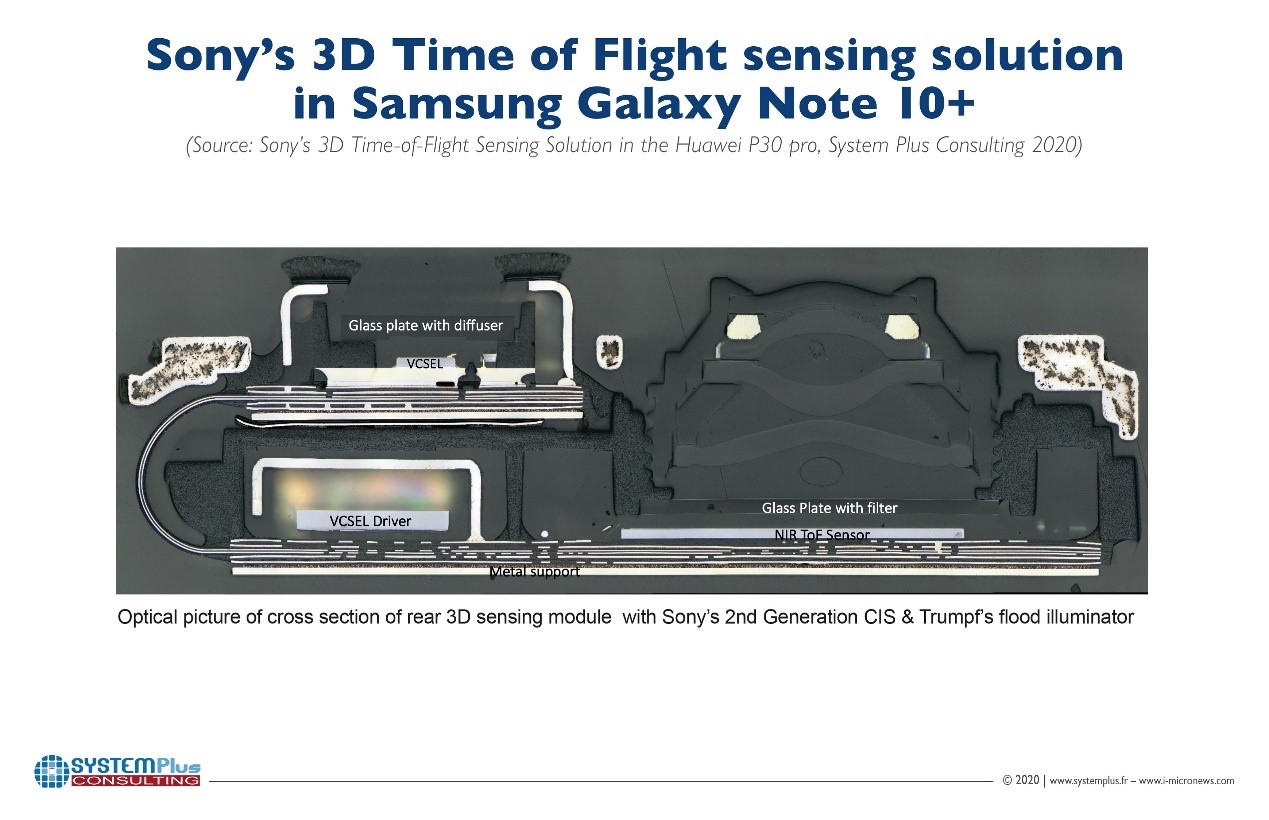
三星Galaxy Note 10+的3D ToF解决方案来自索尼,整个模块包括了发射端与接收端;来源:System Plus Consulting
华为P30 Pro的后置ToF模块选择的则是180x240(4.7万像素,18.9mm²)的索尼IMX316传感器(以及Lumentum的VCSEL光源泛光照明器),单像素尺寸10μm。OPPO R17 Pro等国产手机也有应用这颗传感器的例子[11]。[!--empirenews.page--]
就实现来看,iToF(间接ToF)实际上是一种相比dToF更加易于实施的方法。如果我们采用ToF实施方法分类中,比较通用的一种,则ToF总体分成了iToF与dToF,而iToF则又可以再分成pToF(基于脉冲的ToF)与cwToF(连续波ToF)。
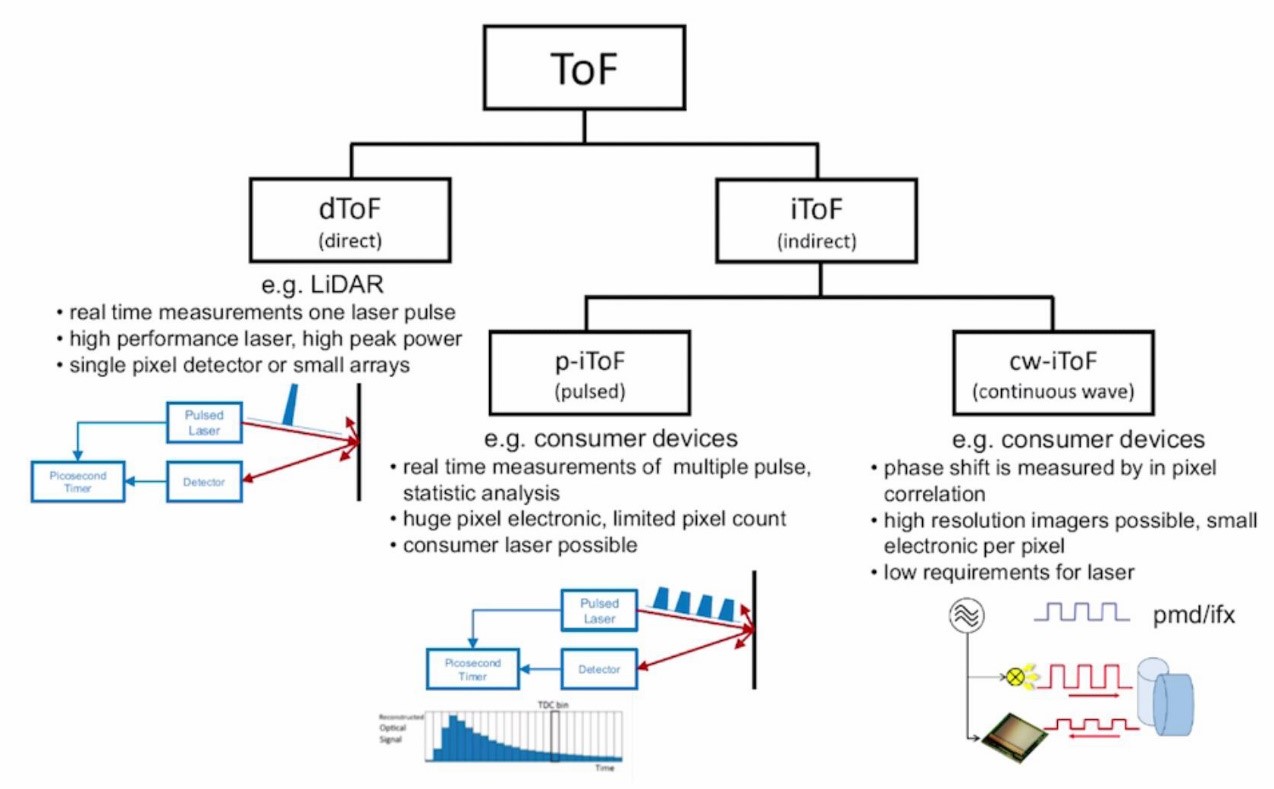
pToF与dToF实际上有些类似,某些分类是将pToF与dToF归在同一类的,都叫基于脉冲的ToF;这两者的不同之处在于pToF是对多脉冲的实时测量,而dToF则是针对单个激光脉冲。手机产品中pToF实施比较有代表性的是vivo NEX双屏版,这款手机采用松下的CCD传感器。
pToF以及CCD传感器有自身的一些优势,例如CCD在高像素实现上暂时有优势,且感光度高,对室外强光有着更天然的适用性;而且如前文所述,pToF更不容易产生画面的运动模糊。但pToF对系统的时间抖动控制要求也比较高,因为发射的光脉冲宽度与接收端传感器的快门要求一致,此外温度校准也更复杂,以及可能要求外置的模拟前端芯片用于深度数据的数字化和输出。另外,CCD由于功耗和发热问题,可能并不怎么适用于手机。
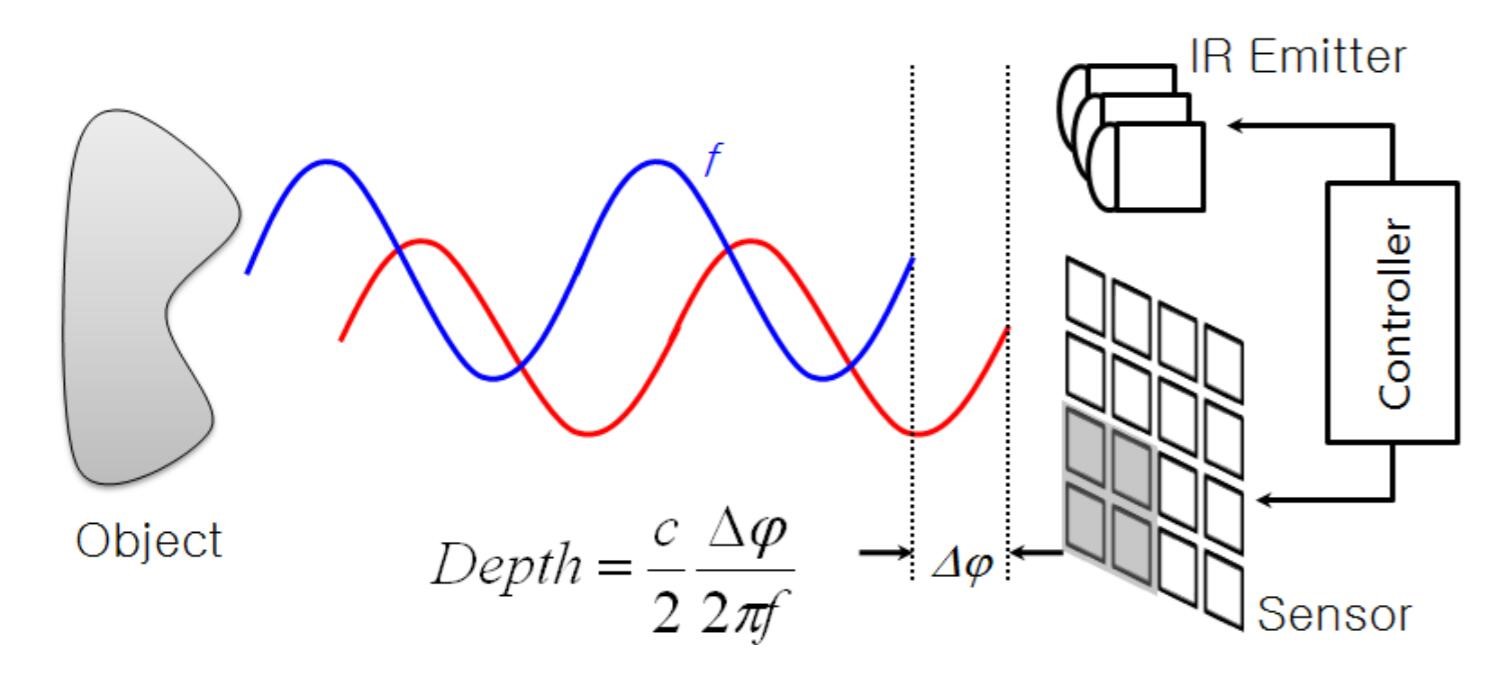
cwToF方法示意,来源:Time of Flight Cameras: Principles, Methods, and Applications
所以以英飞凌和索尼为代表的cwToF(连续波ToF)在移动消费市场是更占据主流地位的。cwToF方法在实施中,发射端会针对照明应用一个周期性的调制信号,最终在光返回到图像传感器时,针对反射光检测相位差,并算得距离。现在我们常说的iToF,很多时候也特指cwToF。
一般来说,cwToF方法实施起来会更为简单(但在精度要求更高时,cwToF信号调制实施难度也很有挑战性),而且是全CMOS成像系统,具备了更好的弹性、更快的读出速度,还能应用RoI(region-of-interest)输出这类功能。不过cwToF方法在技术上也有一些难点和阻碍,其一在于要获得相位差数据,就要求多调制频率下相关函数的四次采样。这样一来,如果再加上多帧处理,则后端数据处理的复杂性会明显比较高。
另外,cwToF的一些局限性主要在于:从上面这张图中的等式可知,如果要获得更长的测量距离(Depth),就需要更慢的调制频率(f)。但如此一来会同时限制距离精度,距离精度与背景光强度、信号强度、最大不模糊距离(maximum unambiguous range,上述等式中的c/2f)有关。对于一个固定的场景来说,由于反射信号强度随着距离增加指数级下降,就会有指数级的精度降低。另外为了满足人眼安全需求,cwToF必须采用较低的峰值输出功率,这样一来SBNR就会比较低;而且cwToF对于多径干扰这类问题的抵御能力更差。
不过相对而言,cwToF是一种在测量距离、精度、系统体积、成本等各方面都非常适用于手机、移动设备的方法。所以目前绝大部分手机和移动设备都选择了cwToF这种方案。而在iPad Pro 2020诞生之后,dToF可在消费领域应用的呼声似乎也明显变高了。
不过索尼以前的确没有过涉足dToF的消息。从索尼DepthSense技术的介绍来看,这是一种典型用于cwToF方法实现的传感器[12]。索尼用了一种名为CAPD(Current Assisted Photonic Demodulator)的像素结构,虽然这名字看起来倒是和APD(雪崩光电二极管)挺像的。
这种像素结构应该是为了提高集光效率,提高相位差计算精度,而做的一种技术加强(如上图)。调制的光首先从VCSEL光源发射出来,碰到场景中的对象之后,反射回来,抵达接收端的图像传感器像素,光子转为电子,切分于交替的探测器结(p+与n+)之间。这两个结为180°异相,可完整捕捉到反射光。另外就是这种传感器,应用了索尼本身就很拿手的背照式CMOS方案,把布线、电路层级置于光电二极管之下,提升感光度。
所以就iPad Pro 2020的LiDAR模块中的传感器来说,如果的确是索尼提供的传感器,莫非索尼又隐藏了什么SPAD传感器黑科技尚未公开,而仅面向苹果提供定制,亦或在具体实施层面,仍有一些值得商榷的细节?这是值得探讨的,也欢迎内行人士为我们解惑。我们也静待更多信息的放出。
当年iPhone X应用结构光,实质上引发了3D成像与感知市场的一波崛起,甚至可以说ToF在消费市场3D感知上的应用都是由iPhone X带动的。当然,如前文所述,ToF在单点测距方向上的应用则早已有之,而且市场规模如今也已经相当之大,意法半导体在这方面的出货量早就破10亿了[1],现在的重点就在3D感知应用方向上。
近些年苹果在消费市场上呼风唤雨的能力仍在持续,iPad Pro开推ToF在3D成像与感知领域的应用,以及传言今年的iPhone 12也可能要上ToF模块,这对原本就在火热发展中的3D ToF市场就是一剂强心针;甚至有机会为dToF在消费市场上的普及铺路——毕竟市场中其他同类产品的解决方案皆以iToF为主。

最后值得一提的是,本文只少许着重提到了ToF模块中接收端部分的图像传感器,然而实际上整个ToF模块至少还包括了发射端的激光照明单元、光学器件(包括diffuser、光学镜头、窄带滤光片等)、驱动电路、周边外围电路,以及相关3D深度数据处理的软件、算法等。而其中的每个环节都有不同的供应商,例如发射端在整个ToF模组也扮演着十分重要的角色,本文未曾涉及。
针对消费市场的ToF模组构成,ToF市场及技术,我们也特别撰写了一份报告,预计将在下个月发布在电子工程专辑网站上。前文提及的部分蜻蜓点水式的内容,包括ToF技术的方法分类,ToF在光学测距方案中所处的位置,它与结构光、立体视觉、聚焦合成、干涉度量法这些测距方案有何异同,以及ToF市场近两年的变化及发展情况等,欢迎届时关注。
[1] TechInsight’s Twitter - Twitter
https://twitter.com/techinsightsinc/status/1244050881705844737
[2] Softkinetic - Wikipedia
https://en.wikipedia.org/wiki/Softkinetic
[3] STMicroelectronics’ Time-of-Flight Sensors and the Starship Enterprise Show up in the iPhone 7 Series - TechInsights
https://www.techinsights.com/blog/stmicroelectronics-time-flight-sensors-and-starship-enterprise-show-iphone-7-series
[4] Zhang Chao, CMOS SPAD Sensors for 3D Time-of-Flight Imaging, LiDAR and Ultra-High Speed Cameras, 2019
[5] LiDAR in a Chip, FlightSense™, Introduction to Time of Flight - STMicroelectronics
https://www.st.com/content/ccc/resource/sales_and_marketing/presentation/product_presentation/group0/e0/84/0c/fb/11/ec/49/1d/SensorsLive_LiDAR_Chip/files/SensorsLive_LiDAR_Chip.pdf/jcr:content/translations/en.SensorsLive_LiDAR_Chip.pdf
[6] Panasonic Develops Long-range TOF Image Sensor with High Ranging Accuracy - Panasonic
https://news.panasonic.com/global/press/data/2020/02/en200218-2/en200218-2.html
[7] Canon & EPFL Report Performance of the World’s Smallest 2.2um SPAD Pixel - f4 NEWS
http://www.f4news.com/2020/04/18/canon-epfl-report-performance-of-the-worlds-smallest-2-2um-spad-pixel/
[8] 12.9” iPad Pro 2020 Teardown: What does the LiDAR scanner look like? – iFixit
https://www.youtube.com/watch?v=xz6CExnGw9w
[9] Major Apple Patents Reveal work on next-gen LiDAR Systems using VCSELs for 3D Sensing Systems and Headset - Patently Apple
https://www.patentlyapple.com/patently-apple/2018/11/major-apple-patents-reveal-work-on-next-gen-lidar-systems-using-vcsels-for-3d-sensing-systems-and-headset.html
[10] 3D imaging and sensing: now it is rear 3D sensing turn to be the leading growing application - Yole Developpement
http://www.yole.fr/3D_Imaging_Sensing_ToF_Adoption.aspx
[11] Huawei Leads Imaging Chip Area Arms Race, Sony Wins Big with i-ToF, Emergence of Event-Driven Vision Sensors - TechInsights
https://www.techinsights.com/blog/imaging-sensing-end-year-highlights
[12] Better Time of Flight: Sony DepthSense 3D Sensor Explained - LUCID
https://thinklucid.com/tech-briefs/sony-depthsense-how-it-works/
[13] STMicroelectronics Ships 1 Billionth Time-of-Flight Module - STMicroelectronics
https://www.st.com/content/st_com/en/about/media-center/press-item.html/t4210.html
