分解器:分解器用于分析处理轴的当前位置,是一种旋转式行程测量系统。
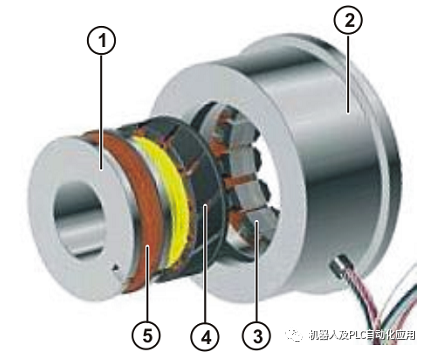
1转子
2定子
3 正弦线圈和余弦线圈
4 转子线圈
5 旋转式变压器
转子 (3)通过旋转式变压器 (2)接受一个电压装置 (1)的供电 (频率 = 8kHz)。在定子线圈 (正弦线圈和余弦线圈;5.6)内,通过感应引起与转子位置成比例的电压。
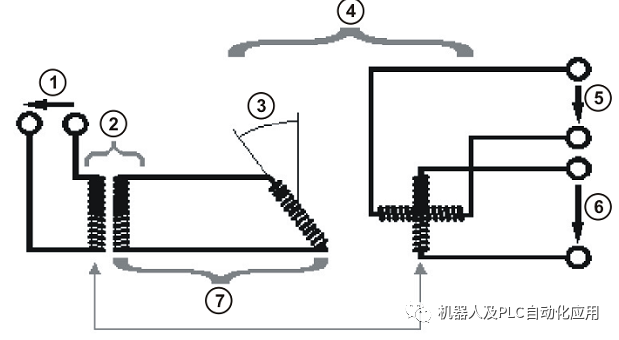
1 输入电压 (8 kHz)
2 旋转式变压器
3 转子线圈
4 自动同步机
5 正弦线圈
6 余弦线圈
7 转子
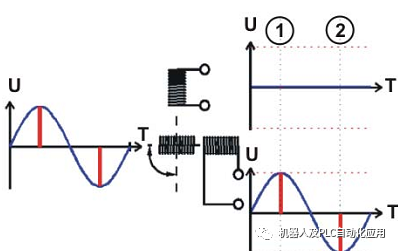
电压随着转子的旋转而变化。
感应引起的电压在两个测量点 (1,2)接受探测和评估。
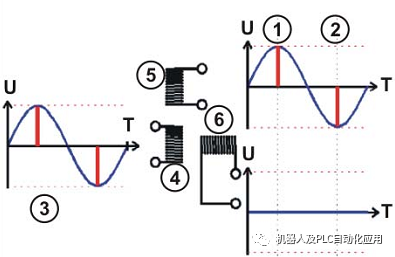
1 第一探测点
2 第二探测点
3输入电压
4转子线圈
5 正弦线圈
6 余弦线圈
U 电压
T 时间
旋转 30 度角时的分解器感应
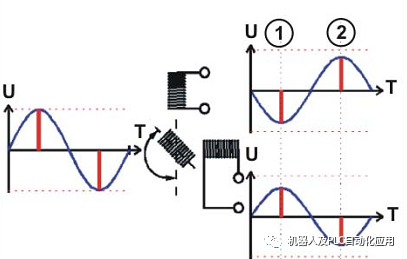
旋转 90 度角时的分解器感应
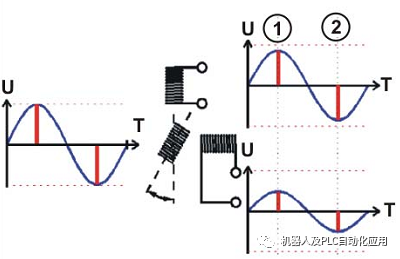
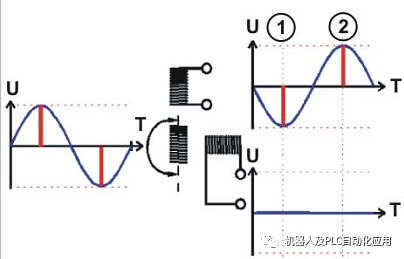
旋转 135 度角时的分解器感应
旋转 180 度角时的分解器感应
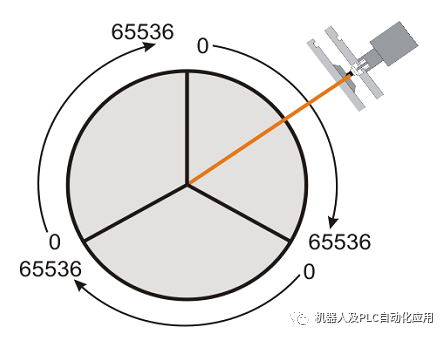
在库卡采用的分解器中,各设有 3 个正弦线圈和余弦线圈。
这样,电机每一圈机械式旋转就等于分解器电旋转 3x120 度角。
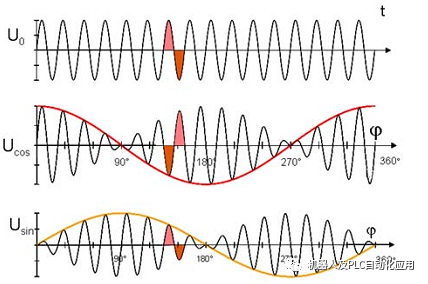
电旋转一圈等于 65536 个增量 (16 比特)。
分解器每一圈机械式旋转则等于 196608 个增量 (3*65536 增量)。
分解器以增量的形式提供位置数据 (16 Bit)。
这些位置数据在 RDC 内乘上一个内部演算系数,并换算成电机角度度数。
在 EDS 里,可保存每条轴的绝对位置值 (64 Bit)。
从该时间点开始,只能继续利用电机角度值来计算。
在校准位置并非所有轴都已设为 0° 或 90°,而是准确数据已保存在机器数据里 ($mames)
$mames[n]:轴n 的机械和数学零点之间的偏移
REAL $MAMES[12]
$MAMES[1]=-20.0000
$MAMES[2]=-120.000
$MAMES[3]=110.000
$MAMES[4]=0.0
$MAMES[5]=0.0
$MAMES[6]=0.0
零点校正就是对机器人的分解器进行校准.
机器人位置在极短时间间隔内、机器人停止运行时或机器人控制系统关机时被
持续保存。
1.如果两个数值相等,则将绝对位置应用到增量里,机器人也就准备就绪可以运行。
2.如果两个数值存在偏差,则必须重新校准机器人。HMI 里将显示与此相关的一条讯息.
RDC -旋转变压器数字转换器
RDC -分解器数字转换器将分解器的模拟数值转换为数字信号,以便将其传输至控制系统。
RDC 安装在金属外壳中,RDC 盒。 根据机器人的不同型号,或者固定在机器人支脚处或者在转盘处。
针对附加轴还可加装其他 RDC,通过 KCB - KUKA 控制器总线相互连接。
RDC 的工作任务:
生成所需的分解器激励电压用于 8 个轴。
借助安全技术分解器 (SIL2)采集八个电机的位置数据。
采集八个电机的工作温度。
采集 RDC 的温度。
与机器人控制器进行通讯。
监控旋转变压器的线路是否中断。
评估 EMD (EMD = Electronic M astering D evice,即电子控制装置)。
将数据保存于存储卡(EDS =Electronic D ata Storage,电子数据存储器)
安全的双通道分解器评估
利用两个 FPGA = (F ield Programmable Gate Array,即现场可编程门阵列)可进行安全的双通道式分解器评估和分解器数据分析处理。
两个 FPGA 的任务相同,并对检测结果进行比对。
只有这样可确保至控制器的通讯连接。
如果出现故障,EtherCAT 连接将会中断。
RDC 印刷电路板上的接口
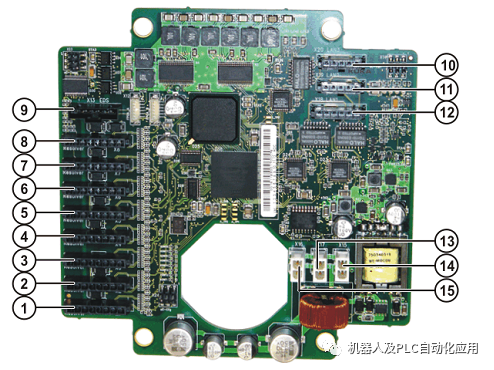
1 .. 8 : X1 .. X8 ,1 至 8 号轴的分解器接口 9: X13,RDC 存储卡的 EDS 接口 10:X20, EMD 11: X19, KCB OUT 12: X18, KCB IN 13: X17, EMD 供电电源 14: X15, 供电电源 IN
15: X16, 电源 OUT(下一 KCB 用户)
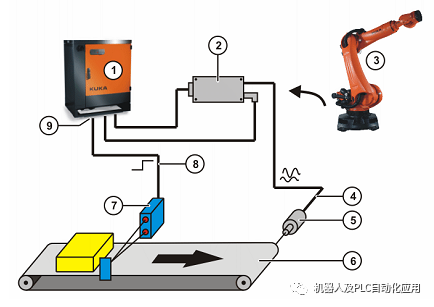
带旋转变压器的输送器 输送器的输送运动可以用旋转变压器检测。旋转变压器连接在机器人底座的RDC 空闲通道上。根据型号的不同,RDC 上有大量不同的空闲通道用于连接旋转变压器。如有必要,可通过另一个 RDC 提供额外的通道。每个机器人控制器最多可以配置 5 个输送器。 同步开关(例如光栅)可用于工件检测。为此,同步开关连接到机器人控制器其中一个可用的快速测量输入端上。 将连接线的平插头通过 SKINTOP 电缆锁紧接头插到空置的接口上。电缆锁紧接头位于 RDC 箱的侧面。插头自动锁定。
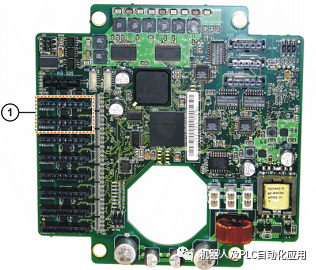
1 RDC 上空置的接口 将连接线的另一端连接到旋转变压器上。
将旋转变压器电缆连接在旋转变压器上
