资料:LM386
现代声呐技术的发展始于20世纪,最初应用于军事,即对水下目标进行探测、分类、定位和跟踪,进行水下通信和导航,保障舰艇的水下安全。随着电子技术和计算机技术的迅速发展,大大推动了声呐技术的发展和应用,目前逐步民用化。虽然目前有成套的声呐探测系统,但大多数信号发射电路和接收电路都是专用的,不仅价格高昂而且不便于理论研究。因此本文将研究集成功率放大器LM386在小功率主动声呐发射电路和接收电路中的应用。
1.集成功率放大器LM386
LM386是一个单电源供电的音频功放,为美国国家半导体公司产品,具有自身功耗低、电压增益可调整、电源电压范围大,外接元件少和总谐波失真小等优点。采用8引线双列直插封装和贴片式。其内部结构图和引脚图如下图所示。
内部结构图:

引脚排列图:

2.声呐传感器
声呐传感器的心脏是压电陶瓷换能器。压电陶瓷换能器的工作原理为:对压电陶瓷片施加压力或拉力,其两端会产生极性相反的电荷,通过回路而形成电流,这种效应称为压电效应。将这种压电陶瓷做成的声呐传感器放在水中,在声波的作用下,声呐传感器两端便会有感应电荷产生。并且,压电效应是可逆的。在主动声呐上施加一个交变电压,压电陶瓷片就会振动,发射出超声波。
声呐传感器:

声呐按工作方式可分为主动声呐、被动声呐。主动声呐是利用发射电路产生周期性变化的交变信号或脉冲信号,在交变信号或脉冲信号的作用下,声呐传感器发射出超声波,超声波在水中传播时,遇到障碍物就会发生反射,反射波信号经声呐接收电路接收,通过信号处理后能测量出障碍物的位置和距离。被动声呐是利用声呐接收电路接收水中物体发出的超声波来测定物体的方位。
3.主动声呐发射电路和接收电路的设计
研究主动声呐传感器需要考虑的3个要素为:中心频率、最大发射功率、探测距离。
(1)主动声呐的中心频率选择与该系统的技术指标(如探测距离)、系统的结构和信道的特性有关。一般情况下,主动探测声呐系统的工作频率为20~60kHz。对近程测量,工作频率可以取高一些;对远程测量,工作频率不能取得太高,因为传播损失随频率增高而增大。本文所研究的主动声呐传感器的中心频率为40kHz。
(2)最大发射功率为主动声呐发射电路的输出功率,即主动声呐传感器输入端的电功率。最大发射功率越大,探测距离越远。本文研究小功率主动声呐测距,探测距离为20~200m。经LM386放大后的输出功率可以满足本文探测要求。
3.1主动声呐发射电路
目前,比较常用的声呐发射信号有正余弦、单频矩形脉冲、线性调频脉冲信号等。声呐发射信号波形的选择直接影响到系统的目标探测能力,采用何种形式的信号,应根据探测声呐系统的任务目的来决定。本文只研究小功率主动声呐测距,因此选择正弦信号作为小功率主动声呐的发射信号。主动声呐发射电路如图所示。发射电路由RC正弦波振荡电路和功率放大电路组成。
主动声呐发射电路:

3.1.1正弦信号源的产生
(1)RC桥式振荡电路。
它又被称为RC串并联振荡电路,一般用于产生频率1Hz~1MHz的正弦波信号。本文研究的声呐传感器的中心频率为40kHz,RC桥式振荡电路可以满足要求。因此,本文由集成运算放大器μA741和RC选频网络组成RC桥式振荡电路。由图4可知,由C1,R3,C2,R4构成的RC选频网络跨接在μA741的同相输入端和输出端,构成正反馈回路;而在μA741的反相输入端和输出端接入由RP1,R2,VD1,VD2组成的稳幅负反馈电路。其中,二极管VD1,VD2起稳幅作用。当振荡电路(μA741的6脚)输出电压波形为负半周时,二极管VD2导通,其正向导通电阻rD与R2电阻并联。若输出负电压越大,并联后的电阻就越小,从而使负反馈加强,闭环增益下降,达到稳幅的作用。当输出电压波形为正半周时,二极管VD1导通,其稳幅原理如前所述。
(2)振荡频率的设定。
由于本文所研究的主动声呐传感器的工作中心频率40kHz,选取电容C=0.01μF后,由振荡频率公式

计算出电阻R3=R4=400Ω
3.1.2功率放大电路
由LM386内部电路结构可知:电阻R7从输出端连接到V2的发射极,形成反馈通路,并与R5和R6构成反馈网络,从而引入深度电压串联负反馈,使整个电路具有稳定的电压增益。
当引脚1和8之间开路时,由于在交流通路中V1管的发射极近似为地,R5和R6上的动态电压为反馈电压,近似等于同相输入端的输入电压。即为二分之一差模输入电压,则有

反馈系数

所以电压放大倍数为

由于R7》(R5+R6),所以

将R5,R6,R7的数据代入式(5),可得Au≈20。
当引脚1和8之间外接电阻R时,则

当图引脚1和8间对交流信号相当于短路时

将R5和R7的数值代入式(7),可得Au≈200。所以,当引脚1和8之间外接不同电阻时,Au的调节范围为20~200。
由主动声呐发射电路可知,在小功率主动声呐发射电路中,LM386引脚1和8之间外接电阻R=20kΩ,根据式(6),功放的电压放大倍数为Au≈21.21。
当发射电路的负载RL=20Ω时,发射电路最大不失真输出电压的幅值为Uo≈11.7V。则发射电路的最大输出功率为

在忽略静态损耗的情况下,效率为

此最大输出功率满足研究的小功率主动声呐探测的功率要求。R5,C7组成相位补偿电路,其作用是避免负载产生过电压而击穿芯片内的功率放大管。电路由单电源供电,故为OTL功放电路。输出端(引脚5)应外接输出电容后再接负载。
3.2接收电路中的功率放大电路
小功率主动声呐接收电路图:
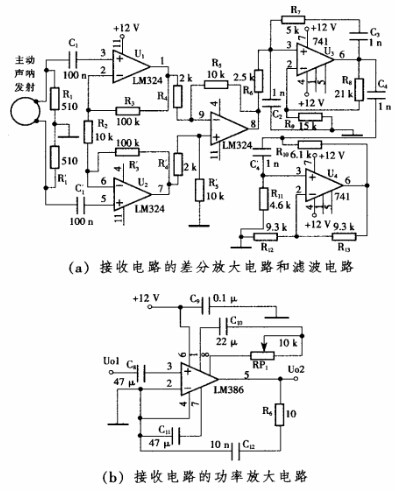
小功率主动声呐接收电路如上图所示。接收电路由差分放大电路、滤波电路和功率放大电路组成。
主动声呐传感器接收发射声呐发射出的超声波,经压电效应将其接收到的超声波转化成电信号。此时接收声呐传感器输出电压为毫伏级,经差分放大和滤波后,在远距离测量中输出信号的能量仍然比较弱,必须对其进行功率放大。
小功率集成功率放大器LM386输入可达毫伏级、电压放大倍数20~200。LM386应用于小功率主动声呐接收电路,电路简单噪声影响小,因此可减少受外界电磁波干扰的面积或避免干扰。LM386频带宽达300kHz,可以对接收电路输出的信号进行放大。
由小功率主动声呐接收电路图中(b)图可知,LM386的引脚1和8之间外接的电阻RP1=1.8kΩ,由式(6)得电压放大倍数为Au≈32.68。R6,C12组成相位补偿电路的作用同发射电路,为了避免负载产生过电压而击穿芯片内功率放大管。电路同样采用单电源供电,输出端(引脚5)应外接输出电容后再接负载。
LM386应用于小功率主动声呐发射电路和接收电路中,需要考虑输入端输入信号的强弱,适当调节输入信号的幅值,使其输出端获得最大不失真的信号,为声呐信号的处理提供比较理想的信号源。
4.结论
本文介绍了小功率主动声呐发射电路和接收电路的设计,对集成功率放大器LM386在发射电路和接收电路中的应用进行了详细的介绍,并对正弦信号源的产生、接收电路中的差分放大电路及模拟滤波电路做了详细的阐述。在水下潜艇模型自主导航课题研究起步阶段,本试验在空气介质中小功率主动声呐发射端和接收端相距200m,用示波器观察到声呐传感器输入端和接收电路经LM386放大后的波形,如图所示。
声呐传感器输入端和接收电路经LM386放大后的波形:

音频集成功率放大器LM386应用于小功率主动声呐发射电路和接收电路中,具有一定通用性和可扩展性。当小功率主动声呐发射信号源形式改变时,LM386同样适用。本设计可以为研究小功率主动声呐探测的信号的处理提供简易的信号源。
