L6711点击型号即可查看芯片规格书
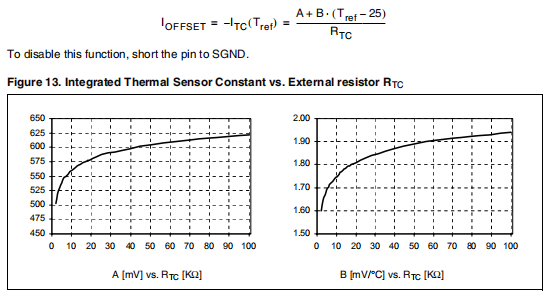
其中RSENSE是传感元件的电阻值(在TMOS=25oC时),B是可从中获得的常数图13,kT是传感元件和控制器之间的温度耦合系数(it结果KT=(TJ-25)/(TMOS-25)),α为敏感元件的温度系数。从RTC开始取决于常数B,反过来又取决于RTC,需要一个迭代过程来正确地设计RTC值。由于热传感器的性质,需要负偏移来补偿ITS在参考温度下引入的主动偏移,并且可以通过连接偏移管脚和SGND之间的电阻设置如下:
动态视频转换
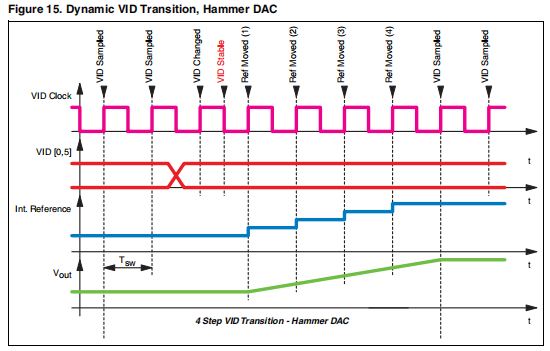
该设备能够管理动态视频代码更改,允许在设备正常运行。OVP和UVP信号在每次VID转换期间被屏蔽,并在转换后重新激活完成。当动态改变调节电压(D-VID)时,系统需要对相应地输出电容器。这意味着需要提供额外的ID-VID,尤其是当增加输出稳压时,必须在设置过电流时加以考虑门槛。当前结果:
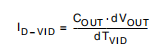
其中,dVOUT是选定的DAC LSB(VRD10.x为12.5mV,Hammer DAC为25mV),TVID是每个LSB转换之间的时间间隔。克服动态视频期间的OC阈值会导致设备进入恒流限制,从而降低输出电压dV/dt,也会导致D-VID测试失败。设备修改参考的方式取决于视频选择状态,然后取决于种类所选DAC的。
VID_SEL=打开(见图14)。
选择VRD10.x DAC,设备将检查时钟上升沿上的VID代码修改这是每相的开关频率的三倍,并等待以下方面的确认下降沿。一旦新代码稳定,在下一个上升沿上,引用就开始上升或下降以LSB增量(12.5mV)每时钟周期(仍然是3·FSW)直到达到新的VID代码。在转换,VID代码更改被忽略;在转换完成后,设备在下一个可用上升沿上重新开始监控VID。
警告:
如果新的VID代码比之前的代码高出1 LSB以上,设备将执行转换以等于3·FSW的频率逐步参考,直到新代码到达:因此建议仔细控制VID变化率,以便仔细控制输出的斜率电压变化。
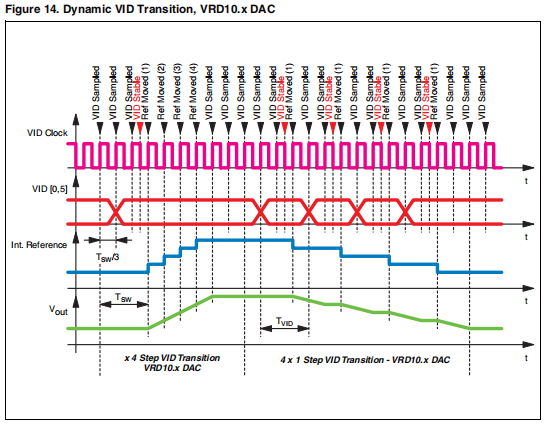
VID_SEL=接地(见图15)。
选择HAMMER DAC,设备检查时钟上升沿的VID代码修改这是每个相位的相同频率,等待下一个下降沿的确认。一次新的代码是稳定的,在下一个上升沿上,引用开始以LSB增量递增或递减(25mV)每个时钟周期,直到达到新的VID代码。在转换期间,VID代码的更改是忽略;设备在下一上升沿完成转换后重新开始监视VID。如果新的VID代码比前一个代码高出1位以上,设备将执行转换步骤 ping每个切换周期的参考,直到新代码到达
启用和禁用
该设备有三种不同的电源:VCC引脚提供内部控制逻辑,VCCDRx供电向车手和车手提供高侧车手。如果针脚VCC和VCCDRx处的电压如果不超过电气特性中规定的开启阈值,则装置关闭:所有驱动器保持mosfet关闭,以显示对负载的高阻抗。一旦设备正确供电,可确保设备正常运行,但可通过不同方式控制:
外销
它可用于复杂系统的功率排序控制。设置引脚自由,该设备实现软启动编程电压。将引脚短路到SGND,复位设备(在这种情况下,SS_端对SGND短路,并且保护被禁用,除非预OVP)来自锁存状态,同时也禁用保持所有mosfet关闭以显示高阻抗的设备去装载货物。然后它可以循环以从任何锁存状态(如OVP和UVP)中恢复。
NOCPU(维特[0;5]=11111倍)
在这种情况下(VID5状态无关),设备被禁用并保持所有mosfet关闭以显示高阻抗负载。然而,它等待任何VID代码转换来启动实现软启动。在此情况下,SS U端引脚对SGND短路
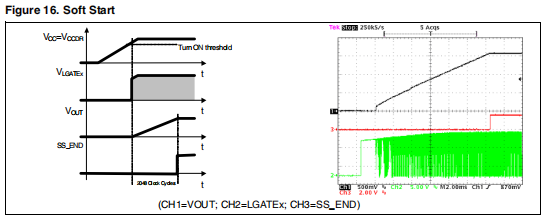
软启动
在软启动过程中,会产生一个斜坡,将回路参考电压从0V增加到编程的最终值在2048个时钟周期内通过VID,如中所示图16。一旦软启动开始,参考值增加:上下MOS开始开关随着闭环调节,输出电压开始增加。在数字软启动结束时然后SS端信号被高电平驱动。当参考电压达到0.6V时,欠电压比较器启用,而过电压在软启动期间,比较器始终处于启用状态,阈值等于编程参考值的115%或ROVP编程的阈值(见相关章节)。
输出电压监视器和保护
该装置通过引脚VSEN监控调节电压,以管理OVP/UVP状态。
紫外线防护
如果VSEN监测的输出电压下降到基准电压的60%以下超过一个时钟周期,设备关闭所有MOSFET,OSC/故障驱动高电平(5V)。条件是锁定;要恢复,需要循环Vcc或OUTEN引脚。
可编程OVP保护
一旦VCC超过开启阈值并且设备被启用(OUTEN=1),设备将提供可编程过压保护;当感应到的电压超过编程的阈值时,控制器永久性地打开所有低侧MOSFET,并关闭所有高侧MOSFET为了保护负载。OSC/故障引脚被驱动为高电平(5V),重启操作需要电源或外部引脚cy cling。OVP阈值是通过OVP引脚编程的:保持引脚浮动,在内部被拉起阈值设置为编程输出电压的115%(典型值)。将OVP引脚连接到SGND通过电阻器ROVP,OVP阈值变成固定电压,如下所示:OVPTH=1.455·ROVP·12.5μ
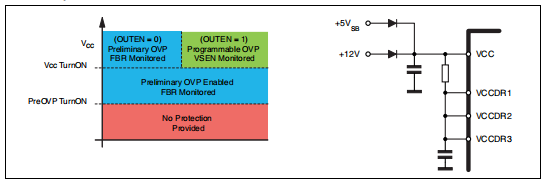
预保护(OVP)
当VCC引脚低于导通阈值时,一个初步的OVP保护开启低侧MOSFET只要FBR引脚电压大于1.8V。当VCC保持在器件开启阈值和预vp开启阈值也取决于OUTEN管脚状态如图17所示-左。当设备关闭(然后避免图17)中未受保护的红色区域包括通过5VSB总线为控制器供电如图17所示-右。过电压和欠电压在软启动过程中也处于激活状态(参见相关章节)。
过电流保护
根据所选的电流读取方法,设备限制感应器的峰值或底部电流进入恒定电流直到设置UVP如下所述。必须通过设计Rg电阻器,将过电流阈值编程为安全值确保设备在设备正常运行期间不会进入OCP。此值必须还应考虑动态VID转换过程中所需的额外电流器件读取MOSFET RdsON或电感器DCR,过程扩展和温度变化这些传感元件。此外,由于内部阈值的扩展,Rg设计必须考虑其最小值IOCTH(最小值)如下: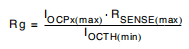
其中IOCPx是当设备进入准恒流(LS-Mosfet感测)或恒流(电感器感测)时由电流读取电路测量的电流,IOCPx必须从开始计算从相应的输出电流值IOUT(OCP)如下(ID-VID也必须考虑实施D-VID):
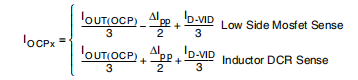
电流(IOUT)输入的电流值(IOUT)为恒定值,其中输出电流为恒定值Mosfet感测)或恒流(电感器感测),∆IPP是每相的电感器电流纹波,以及ID-VID是D-VID所需的附加电流(如适用)。特别是,由于设备限制电感器电流的峰值或谷值(根据CS_SEL状态),纹波实体,如果不是可忽略不计,对实际OC阈值的影响必须考虑。
LS MOSFET检测(CS_SEL=开路)过电流
当电流信息IINFOx Over 达到IOCTH(典型值为35μA)的固定阈值时,设备检测到每个相位的过流情况。当这种情况发生时,器件会使相对的LS-mos fet保持打开状态,跳过时钟周期,直到阈值向后交叉并且IINFOx结果低于低阈值。这意味着该设备限制了每个电感器电流纹波的底部。退出OC条件后,LS mosfet关闭,HS在占空比驱动下打开通过PWM比较器。保持LS开启,跳过时钟周期,导致在退出OC条件之后的接通时间增加。考虑到具有这种电流感测的装置,与通过以下关系式给出的输送电流具有最大的接通时间依赖性:

式中,IOUT为输出电流(IOUT=∑·Ipasex),TSW为开关周期(TSW=1/FSW)。这种线性关系在零负载时为0.80·TSW,在最大电流为0.40·TSW时为典型值并导致装置出现两种不同的过电流行为:
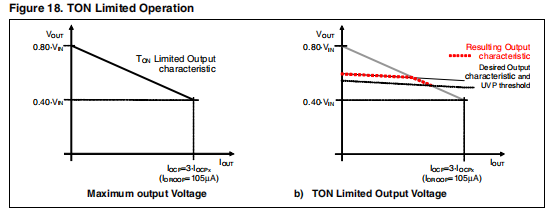
吨限制输出电压。
当每相电流达到IOCPx之前达到最大接通时间时,就会发生这种情况(信息<IOCTH)。图18显示了考虑到前一关系式施加的TON限制,器件能够调节的最大输出电压。如果期望的输出特性穿过最大输出电压有限,输出电压经过交叉后会开始下降。在这种情况下,设备不执行恒流限制,而只限制最大接通时间在之前的关系之后。在检测到UVP或IDROOP=105μA之前,输出电压开始下降,直至产生的特征(如图18所示)。
恒流运行
当每个相位的谷电流达到IOCPx后达到接通时间限制时,就会发生这种情况(信息>目录)。器件进入准恒流运行:低侧mosfet保持在通电状态读取变为低于IOCPx(IINFOx<IOCTH)跳过时钟周期。高侧mosfet可以在LS关闭后,控制回路施加一吨的力,装置正常工作直到检测到另一个OCP事件。这意味着在准恒流运行时,输送的平均电流可以略有增加因为电流纹波增加。事实上,接通时间的增加是由于关闭时间的增加电流必须达到IOCPx底部。最坏的情况是当接通时间达到最大值时价值观。当这种情况发生时,器件以恒定电流工作,输出电压随负载而降低增加。超过UVP阈值会导致设备锁定OSC引脚的驱动(图19显示此工作状态)。可以观察到峰值电流(Ipeak)大于IOCPx,但可以确定如下:

电源连接相关。
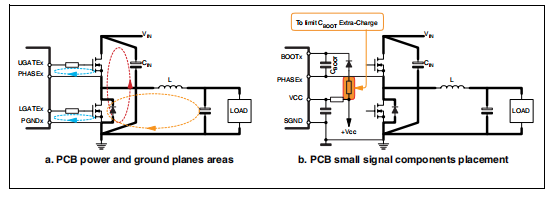
图24显示了一些小信号组件的位置。
栅极和相位迹线的尺寸必须根据提供给电源的驱动器均方根电流确定mosfet。设备的健壮性允许使用远离控制器不失性能。无论如何,如果可能,建议尽量缩短距离控制器和电源部分之间。此外,由于PHASEx引脚是高压侧驱动器的返回路径,因此可以连接该引脚直接到高压侧的mosfet源引脚有一个适当的驱动这个mosfet。对于LS mosfets,返回路径是PGNDx引脚:它可以直接连接到电源接地层。
自举电容器必须尽可能靠近BOOTx和PHASEx引脚,以最小化创建的循环。
VCC和SGND的去耦电容器应尽可能靠近相关引脚。
VCCDRx和PGNDx的去耦电容器应尽可能靠近这些引脚。这个电容器维持低侧mosfet驱动器所要求的峰值电流。
敏感元件必须参考SGND(如有):频率设置电阻ROSC,偏移电阻器ROFFSET、TC电阻器RTC和OVP电阻器ROVP。
星形接地:将SGND与PGND平面连接在一个点上,以避免由于高电流传递会导致设备行为错误。
建议在HS mosfet漏极附近放置一个额外的陶瓷电容器。这有助于降低心衰噪音。
VSEN有助于降低注入管脚的噪声。
OUTEN引脚滤波vs.SGND有助于减少耦合噪声引起的误跳闸:布线时要小心为了减少耦合噪声,驱动网针。
相位引脚尖峰。由于HS-mosfet几乎不开关,因此可以在PHASEx引脚。如果这些电压尖峰克服了引脚的最大击穿电压,该器件可以吸收能量会造成伤害。电压尖峰必须受到适当布局的限制;通过使用栅极电阻、肖特基二极管并联于低压侧MOSFET和/或缓冲网络低边MOSFET,在FSW=600kHz时,20nSec不能克服26V。
启动电容器额外充电。不使用肖特基二极管的系统可能会出现较大的负尖峰在相位引脚上。这个尖峰也是有限的,但是这个尖峰也是有限的结果:导致自举电容器过充。额外的费用会导致最大输入电压的最坏情况,在特定瞬态期间,启动到相位电压克服了防抱死制动系统。最大额定值也会导致设备故障。在这种情况下,建议这样做通过在启动二极管上串联一个小电阻(一个电阻可以如果放在二极管阳极的上游,足够三个二极管使用)。
电流感应连接。
远程缓冲区:该组件的输入连接必须作为平行网络从光纤光栅路由/为了补偿沿输出功率轨迹的损耗,同时也避免了拾取任何共模噪声。将这些引脚连接在远离负载的点上会导致非最佳负载调节,增加输出公差。
电流读数:Rg电阻器必须尽可能靠近限制设备中的噪声注入;这对Rg(RC)-Cg网络仍然有效感应感应器上的电流。将这些电阻器连接到读取点的PCB迹线必须使用专用网络,作为并行记录道布线,以避免拾取任何共模噪声。
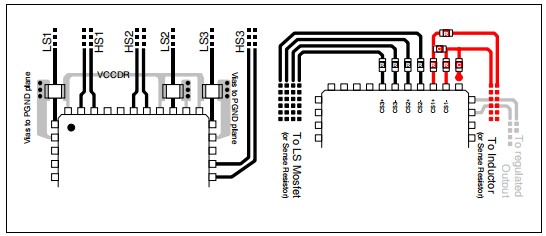
同样重要的是要避免测量中的任何偏移,为了获得更好的精度,连接尽可能靠近传感元件。建议对称布置。CSx线上的VOUT和SGND之间可以需要小的滤波电容器,放置在控制器附近,在电流感应连接中允许更高的布局灵活性。
正在嵌入基于L6711的VRD
将VRD嵌入应用程序时,必须格外小心,因为整个VRD是开关DC/DC调节器和它必须工作的最常见的系统是这样的数字系统MB或类似的。事实上,最新的MB已经变得更快和强大:高速数据总线越来越多VRD产生的更常见的和开关诱发的噪声如果不遵循,可能会影响数据完整性其他布局指南。在以下情况下布线时,必须主要考虑几个简单点开关大电流(开关大电流会引起杂散电感上的电压尖峰引起噪声的迹线会影响附近的迹线):在大电流开关VRD轨迹和数据总线之间保持安全防护距离,尤其是在高速数据总线,减少噪音耦合。为必须行走的I/O子系统路由偏差跟踪时,保持安全防护距离或适当过滤靠近VRD。噪声的可能原因可能是相位连接、Mosfet栅极驱动和输入电压路径(从输入大容量电容器和HS漏极)。如果不坚持,也必须考虑PGND连接在一个电源地平面上。这些连接必须小心远离噪声敏感数据。由于产生的噪声主要是由于VRM的开关活动,噪声排放取决于电流开关有多快。为了降低噪声排放水平,除了之前的减小电流斜率,然后增加开关次数的指南:这将导致开关损耗增加,这是在系统的其他设计中必须考虑的因素。
