LIS331DL点击型号即可查看芯片规格书
特征
2.16 V至3.6 V电源电压
1.8V兼容IOs
<1兆瓦功耗
±2g/±8g动态选择满标度
I2C/SPI数字输出接口
可编程中断发生器
嵌入式点击和双击识别
嵌入式自由落体和运动检测
嵌入式高通滤波器
嵌入式自检
10000 g高冲击生存能力
符合ECOPACK®RoHS和“绿色”标准(见第9节)
应用
自由落体检测
动作激活功能
游戏和虚拟现实输入设备
振动监测和补偿
说明
LIS331DL,属于ST运动传感器,是消费最小的低功耗三轴线性加速度计。这个设备具有数字I2C/SPI串行接口标准输出和智能嵌入式功能。传感元件,能够检测加速度,使用专用ST公司开发的生产惯性的工艺硅传感器和执行器。IC接口是用CMOS制造的允许设计专用电路的过程为了更好地匹配感测元件特性。LIS331DL具有用户可动态选择的功能满量程为±2g/±8g用输出数据速率测量加速度100赫兹或400赫兹。自测试功能允许用户检查传感器在最终应用中的功能。该装置可被配置成产生惯性唤醒/自由落体中断信号超过可编程加速阈值至少在三个轴中的一个轴上。阈值和中断发生器的定时是可编程的由最终用户动态执行。LIS331DL可用于塑料接地网阵列包(LGA),并保证在延长的温度范围内操作-40°C至+85°C。
机械和电气规范
机械特性
表3.机械特性@Vdd=2.5 V,T=25°C,除非另有说明(1)
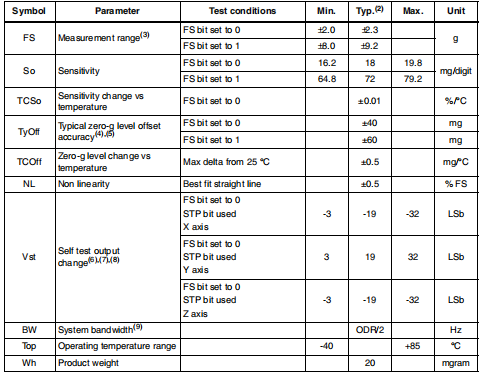
1.产品在出厂时校准为2.5V。工作电源范围为2.16V至3.6V。
2.不保证典型规格
3.通过晶片级测试和初始偏移和灵敏度测量进行验证
4.MSL3预处理后的典型零g电平偏移值
5.可通过启用内置高通滤波器消除偏移
6.如果使用STM位,则所有轴的符号值都会发生变化
7.自检输出随电源的变化而变化。“自检输出更改”定义为输出[LSb](CTRL_REG1上的自检位=1)-输出[LSb](CTRL_REG1上的自检位=0)。1LSb=4.6g/256,8位表示,±2.3g满量程
8.由于设备过滤,启用自检模式时,3/ODR后输出数据达到最终值的99%
9.ODR是输出数据速率。规格见表4
化学特性
表4。Vdd=2.5 V,T=25°C时的电气特性,除非另有说明(1)
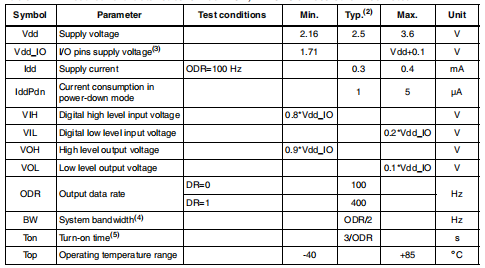
1.产品在出厂时校准为2.5V。工作电源范围为2.16V至3.6V。
2.不保证典型规格
3.在这种情况下,可以在不阻塞通信总线的情况下移除维持Vdd_IO的Vdd测量链断电。
4.滤波器截止频率
5.退出掉电模式后获取有效数据的时间
绝对最大额定值
高于“绝对最大额定值”的应力可能导致永久性损坏到设备。这只是一个应力额定值和设备在这些压力下的功能操作条件不是隐含的。长期暴露在最高评级条件下可能影响设备可靠性。
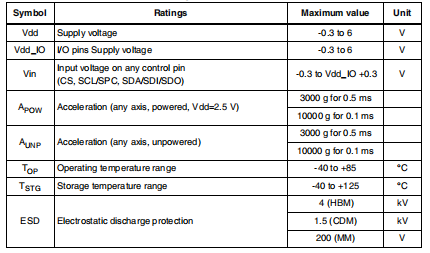
注:任何针脚上的电源电压不得超过6.0 V
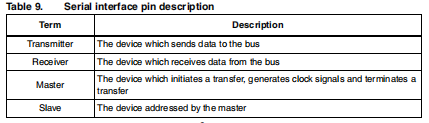
术语
灵敏度
灵敏度描述了传感器的增益,可通过施加1g等方法确定加速到它。由于传感器可以测量直流加速度,因此可以通过将感兴趣的轴指向地球中心,记录输出值,旋转传感器旋转180度(指向天空)并再次记录输出值。通过做因此,对传感器施加±1 g加速度。从中减去较大的输出值较小的一个,将结果除以2,得到传感器的实际灵敏度。这个温度和时间的变化很小。灵敏度公差描述了大量传感器的灵敏度范围。
零重力水平
零g电平偏移(TyOff)描述实际输出信号与理想值的偏差如果没有加速度,则输出信号。水平表面上处于稳定状态的传感器X轴和Y轴各测量0g,而Z轴测量1g。输出理想情况下处于传感器动态范围的中间(输出寄存器00h的内容,数据表示为2的补码数)。在这种情况下,与理想值的偏差是称为零重力偏移。偏移量在一定程度上是MEMS传感器和因此,将传感器安装到印刷电路上后,偏移量可能会略有变化或者将其暴露在广泛的机械应力下。偏移量随温度变化很小,参见“零g液位变化与温度”。零公差(TYG)描述了电平一组传感器的零-g水平范围的标准偏差。
自检
自检允许在不移动传感器的情况下检查其功能。自检功能是当CTRL_REG1(控制寄存器1)的自检位编程为“0”时关闭。当ctrl_reg1的自检位被编程为“1”,向传感器施加驱动力,模拟确定的输入加速度。在这种情况下,传感器输出将出现变化在他们的直流电平,这是通过设备灵敏度选定的满标度。当自检激活时,设备输出电平由由作用在传感器上的加速度和静电试验力产生的信号。如果输出信号在表3中规定的振幅范围内变化,则传感器工作正常,接口芯片参数在规定范围内规范。
点击和双击识别
点击和双击识别功能有助于创建人机界面软件过载很少。该设备可配置为在在任何方向上敲击时使用专用销。如果传感器暴露在单一输入刺激下,它会在惯性上产生一个中断请求中断引脚(INT1和/或INT2)。一个更高级的功能允许生成中断当应用“双击”刺激时请求。两者之间的可编程时间事件允许灵活地适应应用程序需求。鼠标按钮式应用程序,如点击和双击,可以实现。用户可根据预期振幅和刺激的时间。
功能
线性加速度计封装在LIS3313中,是一种低功耗的数字加速度计LGA包。整个装置包括传感元件和IC接口从传感元件获取信息并向外部提供信号通过I2C/SPI串行接口。
传感元件
专利工艺用于制造表面微机械加速度计。这个这项技术可以实现悬浮硅结构基板上的几个点称为锚定点,并可在感测方向上自由移动加速。为了与传统的包装技术兼容,一个盖子被放在上面传感元件顶部,以避免在塑料封装。当加速度施加到传感器上时,验证质量从其标称质量位移位置,导致电容半桥不平衡。这种不平衡是被测量出来的利用电荷积分来响应施加在电容器上的电压脉冲。在稳态下,电容器的标称值为小功率因数,当加速度为应用时,电容性负载的最大变化在fF范围内。
IC接口
整个测量链由一个低噪声电容放大器组成将MEMS传感器的电容不平衡转换为模拟电压最后由模数转换器提供给用户。加速度数据可通过I2C/SPI接口访问,从而使特别适合与微控制器直接接口的设备。LIS331DL具有一个数据就绪信号(RDY),它指示测量的加速度数据是可用的,因此简化了数字同步的数据使用设备的系统。LIS331DL也可配置为产生惯性唤醒和自由落体根据已编程加速事件沿启用轴发出中断信号。自由落体和唤醒可以同时在两个不同的引脚。
工厂校准
IC接口在工厂进行了灵敏度(So)和零g电平(TyOff)校准。微调值存储在设备内部的非易失性存储器中。任何时候装置开启后,微调参数被下载到寄存器中使用在正常操作期间。这使得无需进一步校准即可使用设备。
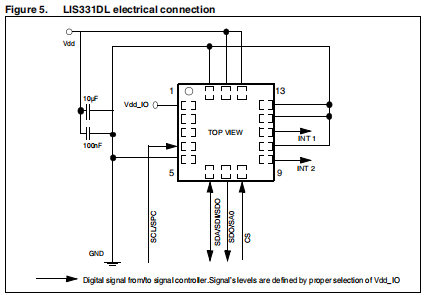
设备核心通过Vdd线供电,而I/O焊盘通过Vdd连接线。电源去耦电容器(100 nF陶瓷,10μF Al)应尽可能靠近装置的引脚14(一般设计惯例)。所有电压和接地电源必须同时存在,以便IC的行为(参考图5)。可以移除Vdd并保持Vdd_IO在不阻塞通信总线的情况下,测量链断电。装置的功能和测量的加速度数据是可选的,并且可通过I2C/SPI访问接口。什么时候使用I2C,CS必须绑得很高。两个中断引脚(INT 1和INT 2)的功能、阈值和定时可以是完全由用户通过I2C/SPI接口编程。
4.1焊接信息
LGA包装符合ECOPACK®、RoHS和“绿色”标准。它是符合JEDEC J-STD-020C的焊接耐热性。焊接过程中保持“引脚1指示器”未连接。
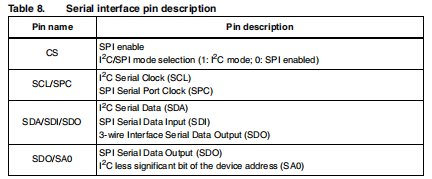
数字接口
嵌入在LIS331DL中的寄存器可以通过I2C和SPI串行接口。后者可以被SW配置为在3线或4线中操作接口模式。串行接口映射到相同的焊盘上。选择/利用I2C接口,CS线路必须绑高(即连接到Vdd U IO)。
I2C串行接口
LIS331DL I2C是总线从机。I2C用于将数据写入寄存器内容也可以读回。下表给出了相关的I2C术语。
有两个信号与I2C总线相关:串行时钟线(SCL)和串行数据线(SDA)。后者是用于发送和接收数据的双向线路到/从接口。两条线路都通过上拉电阻器连接到Vdd_IO嵌入到LIS331DL中。公共汽车空闲时,两条线路都很高。I2C接口符合快速模式(400 kHz)I2C标准以及正常模式。
I2C操作
总线上的事务通过启动(ST)信号启动。启动条件是定义为当SCL线保持在高电平时数据线上的高到低转换。之后这已经被主控传输,总线被认为是繁忙的。数据的下一个字节在启动条件后传输,在前7位中包含从机的地址,并且第八位告诉主机是从机接收数据还是向其发送数据。当一个地址被发送时,系统中的每个设备会比较前7位在一个起始条件及其地址之后。如果它们匹配,则设备认为自己已寻。与LIS331DL关联的从属地址(SAD)为001110xb。SDO/SA0垫可以用于修改设备地址的低有效位。如果SDO连接到pad电源LSb为'1'(地址0011101b),否则如果SDO pad连接到地面,LSb值为“0”(地址0011100b)。这个解决方案允许连接和处理两个不同的加速度计连接到同一I2C总线。必须有确认的数据传输。发射器必须释放SDA线路在确认脉冲期间。然后接收器必须将数据线拉低,以便在应答时钟脉冲的高周期内保持稳定的低电平。一个接收器必须在数据的每个字节之后生成一个确认收到。嵌入在LIS331DL中的I2C的行为类似于从设备,并且必须遵守协议。在启动条件(ST)之后,发送从机地址,一次从机确认(SAK)已返回,将传输一个8位子地址:7LSb表示实际寄存器地址,而MSB启用地址自动递增。如果子字段的MSb为1,则SUB(寄存器地址)将自动递增允许多个数据读/写。从机地址由一个读/写位完成。如果位是“1”(读取),则重复启动(SR)条件必须在两个子地址字节之后发出;如果位为“0”(写入)主机将在方向不变的情况下发送给从设备。表10解释了SAD+读/写位模式组成,列出了所有可能的配置。
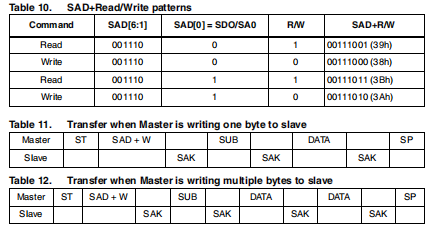
数据以字节格式(Data)传输。每次数据传输包含8位。号码每次传输传输的字节数是无限的。数据以最高有效位传输(MSb)第一个。如果另一个字节接收不到数据,则无法执行其他一些功能,它可以保持时钟线,SCL低,迫使发射机进入等待国家。只有当接收器准备好接收另一个字节并释放时,数据传输才会继续数据线。如果从机接收器没有确认从机地址(即它不能接收,因为它正在执行一些实时功能)数据线必须保持在高位。然后主机可以中止传输。SDA线上的一个从低到高的转变SCL线高时被定义为停止条件。每次数据传输必须由于生成停止(SP)条件而终止。为了读取多个字节,有必要断言子地址字段的最高有效位。换句话说,SUB(7)必须等于1,而SUB(6-0)表示要读取的第一个寄存器的地址。在所提供的通信格式中,MAK是主确认,NMAK是No主确认。
SPI总线接口
LIS331DL SPI是总线从机。SPI允许写入和读取设备。串行接口通过4线与外界交互:CS、SPC、SDI和SDO。
CS是串行端口启用,由SPI主机控制。一开始就很低传输并在最后返回高位。SPC是串行端口时钟由SPI主机控制。当CS高(无传输)时,停止高电平。SDI和SDO分别是串口数据的输入和输出。这些线是在SPC的下降沿,应在SPC的上升沿捕获。
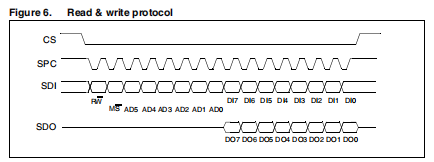
读寄存器和写寄存器命令在16个时钟脉冲或在多字节读/写的情况下为8的倍数。位持续时间是两者之间的时间SPC下降沿。下降后,第一位(位0)从SPC的第一个下降沿开始CS的边缘,而最后一位(位15,位23,…)从SPC的最后下降沿开始在CS崛起的边缘之前。位0:RW位。0时,数据DI(7:0)写入设备。当为1时,数据为(7:0)从设备读取。在后一种情况下,芯片将在第8位开始时驱动SDO。
位1:MS位。当0时,地址将在多个读/写命令中保持不变。当为1时,地址将在多个读/写命令中自动递增。
位2-7:地址AD(5:0)。这是索引寄存器的地址字段。
位8-15:数据DI(7:0)(写入模式)。这是将写入设备(MSb)的数据第一)。
位8-15:数据DO(7:0)(读取模式)。这是将从设备(MSb)读取的数据第一)。
在多个读/写命令中,还将添加8个时钟周期的块。当MS位为0用于读/写数据的地址对于每个块都保持相同。当MS位是1用于读/写数据的地址在每个块递增。SDI和SDO的功能和行为保持不变。
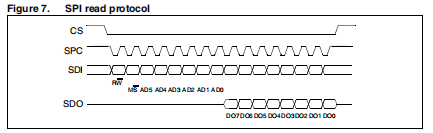
SPI Read命令由16个时钟脉冲执行。多字节读取命令是在前一个时钟脉冲上加上8个时钟脉冲块。
位0:读取位。值为1。
位1:MS位。当0不递增地址时,当1在多个阅读。
位2-7:地址AD(5:0)。这是索引寄存器的地址字段。
位8-15:数据DO(7:0)(读取模式)。这是将从设备(MSb)读取的数据第一)。
第16位-。。。:数据DO(…-8)。多字节读取中的进一步数据。

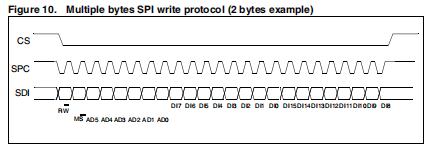
SPI写入命令由16个时钟脉冲执行。多字节写入命令是在前一个时钟脉冲上加上8个时钟脉冲块。
位0:写入位。值为0。
位1:MS位。当0不递增地址时,当1在多个写作。
位2-7:地址广告(5:0)。这是索引寄存器的地址字段。
位8-15:数据DI(7:0)(写入模式)。这是将写入设备内部的数据(MSb优先)。
第16位-。。。:数据DI(…-8)。多字节写入的进一步数据。
3线模式下的SPI读取
通过在中设置为1位SIM(SPI串行接口模式选择)进入3线模式控制寄存器2。
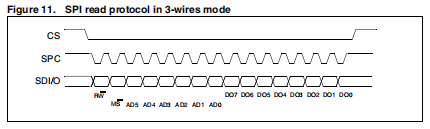
SPI读取命令由16个时钟脉冲执行:
位0:读取位。值为1。
位1:MS位。当0不递增地址时,当1在多个阅读。
位2-7:地址AD(5:0)。这是索引寄存器的地址字段。
位8-15:数据DO(7:0)(读取模式)。这是将从设备(MSb)读取的数据第一)。多读取命令也可在3线模式下使用。
