L292点击型号即可查看芯片规格书
驱动能力:2 A,36 V,30 KHz
2逻辑芯片启用
外部回路增益调整
单电源(18至36 V)
输入信号对地对称
热保护
说明
L292是一个集成在15引线Mul tiwatt®封装中的单片LSI电路。它是打算一起使用的带有L290和L291,作为一个完整的3片式电机定位系统,用于应用程序,如在类型写入中的汽车/菊花轮位置控制。L290/1/2系统可由微处理器。
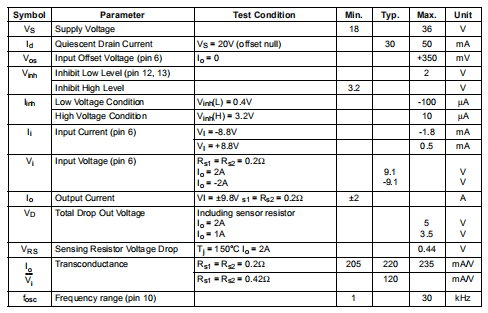
电气特性
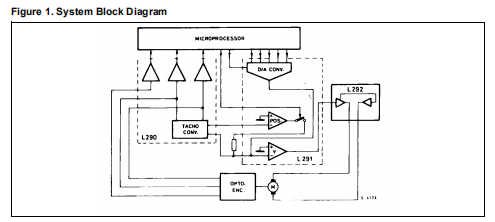
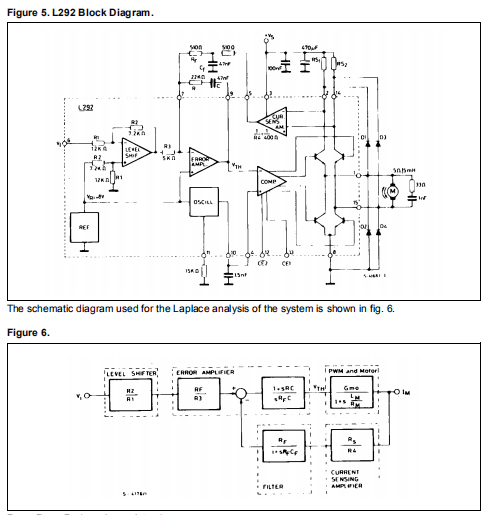
系统描述
L290、L291和L292将用作3芯片微处理器控制的定位系统。该设备可以单独使用-尤其是L292电机驱动器-但因为他们通常会一起使用时,典型的L290/1/2系统说明如下。此时,微处理器命令开关切换到位置模式(L291引脚8处的选通信号)和在3到4毫秒内,L292驱动电机至零位,在零位通过电子“拉幅”保持。机械/电气接口包括
系统采用两种工作模式,实现高速、高精度定位。
系统的速度指令源自微处理器。它在马达上不断更新通过L290转速表芯片的脉冲定位,whitch in tur从光电编码器获取信息。根据这个基本输入,微处理器计算出一个5位控制字来设置系统速度取决于行驶的距离。当电动机停止运行,微处理器命令它到一个新的位置时,系统开始工作在开环配置中,因为没有来自转速表发电机的反馈。最大速度A达到时,转速表芯片输出将回退处理器信号,从而减少加速扭矩。电机继续以rop速度运行,但处于闭环控制下。当接近目标位置时,微处理器降低速度需求字的值;这降低主加总点的电压,实际上是制动电机。逐渐施加制动,直到电机以最小速度运行。产生两个异相90°正弦信号的光学编码器(根据电机引导在频率上与旋转速度成比例。光学编码器还提供磁盘上一个位置的输出,用于设置初始位置。光电编码器信号、FTA和FTB被网络R2C2和R3 C3过滤(参考图4)并提供给L290上的FTA/FTB输入。L290的主要功能是实现以下表达式:

输出信号(TACHO)=dVAB·FTA-dVAA·FTBdt | FTA | dt | FTB |因此转速计的平均值与转速成正比,其极性指示旋转方向。上述功能是通过放大A1和A2中的输入信号来实现的,以获得VAA和VAB(典型值7)。从VAA和VAB的外部差分RC网络R5 C6和R4 C4给出信号VMA和供给乘数的VMB。每个乘法器的第二个输入由另一个乘法器在差分前的第一个输入的符号组成,这些符号是使用比较器Cs1和Cs2获得的。乘法器输出,CSA和CSB,用A3求和得到最终的输出信号TACHO。转速计的峰值峰值纹波信号可以从以下表达式中找到: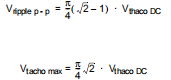
利用共振器C1和C2,从VAA和VAB得到另外两个信号:逻辑信号STA还有机顶盒。微处理器使用这些信号通过计数脉冲来确定位置。L2910内部参考电压也来自VAA和VAB:
根据输入端温度的变化来补偿输入端的温度变化。“每次旋转一个脉冲”光电编码器输出连接到L290(FTF)的引脚12平方表示微处理器的STF逻辑输出。转速计信号和Vref分别通过滤波网络R8 C8 R9和R6 C7 R7发送到L291。
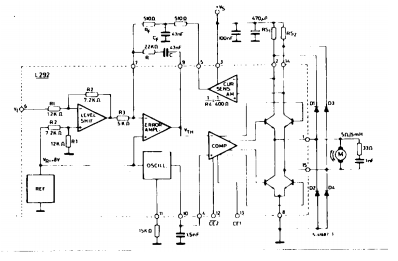
该芯片的引脚12是系统的主要求和点,其中转速计和D/A转换器输出进行比较。D/A转换器的输入由5位字加上微处理器提供的符号位组成。标志钻头控制电机旋转方向。D/A转换器的(模拟)输出(DAC/OUT)与转速计信号进行比较,误差放大器放大了采样误差信号,随后出现在引脚1上。ERRV sognal(来自引脚1,L291)被送入最终芯片L292的引脚6H桥电机驱动器。该输入信号是双向的,因此必须将其转换为正信号ba,因为L292使用单电源电压。这是由第一级完成的-电平变换器,它使用内部产生的8伏参考电压。这个相同的参考电压供给三角波振荡器,其频率由外部固定RC网络(R20、C17-插脚11和10),其中:
振荡器决定输出级的开关频率,并且应该在1到30之间千赫。电机电流由L292中的内部回路调节,该回路由电阻器R18、R19执行差分电流检测放大器,其输出由外部RC网络滤波
反馈到误差放大器。
这些RC网络(引脚5、7、9)中外部元件的选择由电机类型决定以及带宽要求。图中显示的值适用于5Ω,5 MH的电机。(见L292应用信息中的传递函数计算)。通过输入和电流反馈信号(引脚7)相加获得的误差信号用于脉冲宽度通过比较器调制振荡器信号。脉宽调制信号控制Hbridge的占空比,以提供与L292输入信号相对应的输出电流。桥接器一侧断开与另一侧接通之间的间隔t,由C17与一个内部电阻Rt相结合。这可以从以下方面得出:
因为Rτ约为1.5 KΩ,建议避免同时传导的t为2.5μs Cpin10应该在1.5 nF左右。电流检测电阻器R18和R19应为高精度型(最大公差±2%)建议值由以下公式给出:
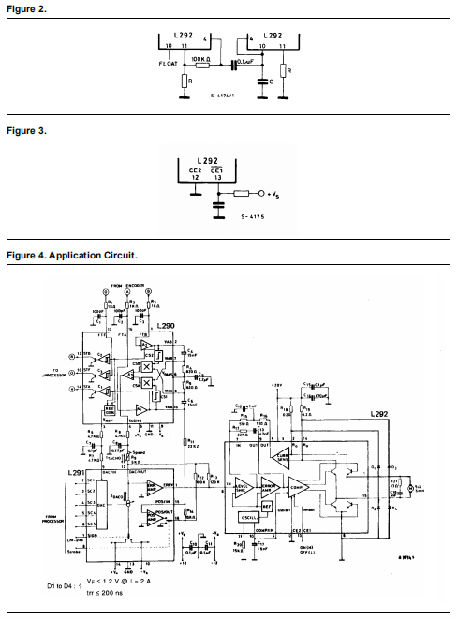
如果需要,可以使用图2中所示的网络来同步两个L292。最后,在L292上提供两个启用输入(引脚12和引脚13分别激活低电平和高电平)。因此输出级可通过引脚12高或引脚13低来抑制。输出也将是如果电源电压低于18V,则禁用。启用输入是以这种方式实现的,因为它们是由微处理机直接驱动的。当前可用的微处理器在通电期间可能会产生高达1.5V的峰值。这些输入可用于各种应用,如逻辑复位期间的电机抑制系统和上电复位(见图3)。
申请信息
添加此部分是为了帮助设计者最佳选择外部值组件。
RS1=RS2=RS(感应电阻)
 (电流感应放大器跨导)LM=电机电感,RM=电机电阻,IM=电机电流
(电流感应放大器跨导)LM=电机电感,RM=电机电阻,IM=电机电流
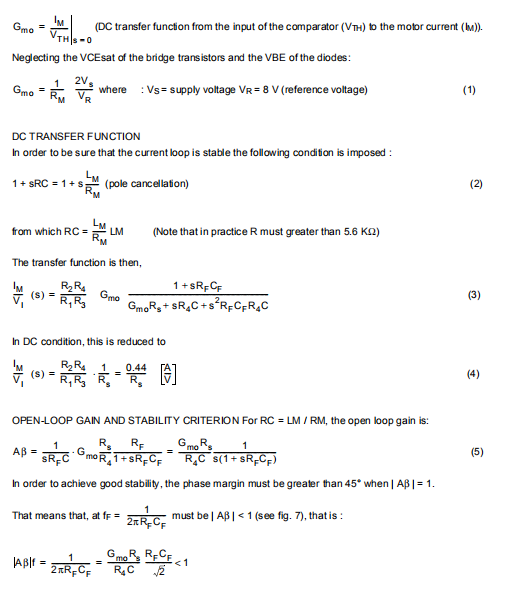
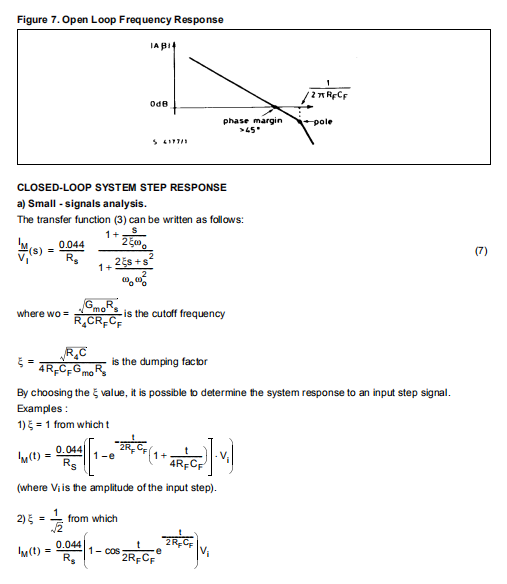
图8。小信号阶跃响应(标准化振幅与t/RFCF)。
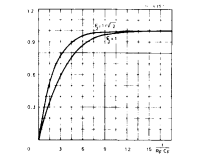
V7=200毫伏/分贝。
IM=100毫安/分压。
t=100μs/div,VI=1.5 Vp。
可以验证L292在整个电机电流上升期间在“闭环”条件下工作时间:误差放大器引脚7逆变输入处的电压锁定为参考电压VR,存在于同一放大器的非反相输入端。对于这个例子,前面的线性分析是正确的。减小ξ值,电流上升时间减小。但是为了一个好的稳定,从关系(6) ,ξ的最大值为: (相位裕度=45°)
(相位裕度=45°)
b) 大信号响应
大阶跃信号响应受摆率和电感负载的限制。在这种情况下,在电机电流上升的时间内,L292工作是开环状态。闭环系统带宽。x的一个好选择是值1/2。在这种情况下: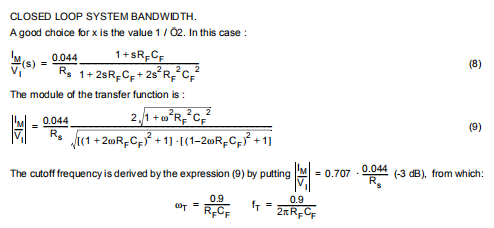
例子:
a) 数据
–电机特性:
LM=5分钟
RM=5瓦
LM/RM=1毫秒
–电压和电流特性:
Vs=20伏IM=2安VI=9.1伏
–闭环带宽:3 kHz
b) 计算
从关系(4):
