特征
•可配置为线性或PWM模式VCM电流生成
•VCM的高效PWM电流控制
•高级铃声补偿
•集成10位D/A转换器,用于VCM电流控制
•保护
–开路和短路检测
–欠压锁定(UVLO)
–热关机
–VCM驱动器的内部电流限制
–4千伏ESD-HBM
•I2C接口
•改善PWM到线性模式的设置时间与DRV201
•与DRV201相比,EMC性能有所提高
•改善PWM到线性模式的稳定时间与DRV201
•与DRV201相比,EMC性能有所提高
•工作温度范围:-40oC至85oC
•6球WCSP组件,间距0.4 mm
•最大模具尺寸:0.806 mm×1.49 mm
•最大包装高度:0.3 mm
应用
•手机自动对焦
•数码相机自动对焦
•虹膜和曝光控制
•安全摄像头
•网络和PC摄像头
•执行机构控制
说明
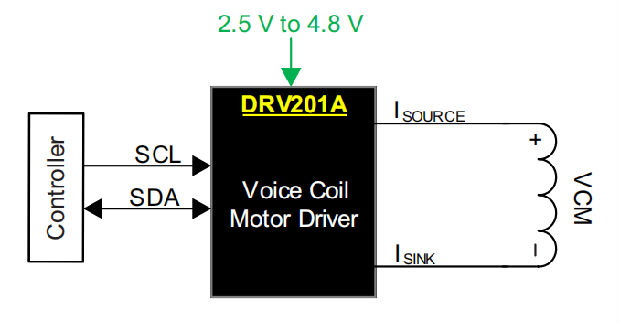
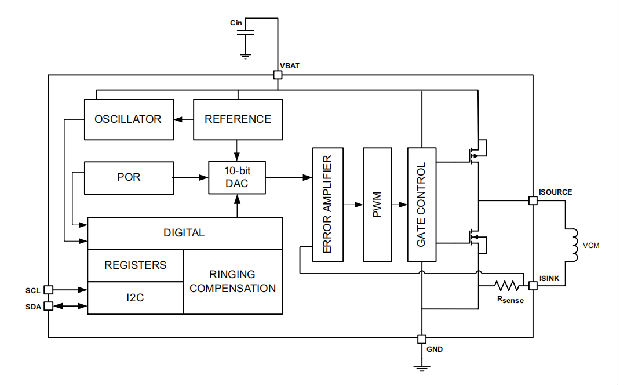
DRV201A是一款先进的音圈马达驱动器,用于相机自动对焦。它有一个集成的D/A转换器来设置VCM电流。VCM电流由固定频率的PWM控制器或线性模式驱动器控制。电流生成可以通过I2C寄存器选择。DRV201A有一个用于电流调节的集成感测电阻,电流可以通过I2C进行控制。
当改变VCM中的电流时,镜头振铃通过高级振铃补偿功能进行补偿。振铃补偿大大减少了自动对焦所需的时间。该装置还具有VCM短路和开路保护功能。
设备信息

(1)、有关所有可用的软件包,请参阅数据表末尾的订购附录。
简化示意图
典型特征
详细说明
概述
DRV201A用于相机模块中的高性能自动对焦。它用于控制音圈电机(VCM)中的电流。VCM中的电流产生磁场,迫使连接到弹簧上的透镜组移动。VCM电流和镜头位置可通过I2C接口控制,并可实现自动对焦功能。
DRV201A在两个方面比DRV201具有更高的性能水平。首先,在PWM和线性模式没有任何共振。这允许在PWM模式下获得聚焦后更快的图像捕获。另一个性能增强是在EMC性能方面。与DRV201相比,在PWM模式下工作时,转换明显减慢,导致传导和辐射噪声更低。
该设备通过支持高达400kbit/s数据速率的标准I2C接口连接到视频处理器或图像传感器。数字接口支持1.8 V至3.3 V的IO电平。所有引脚均具有4-kV HBM ESD额定值。
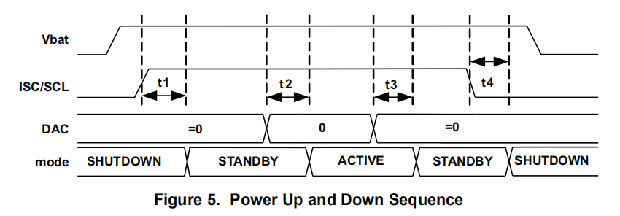
当SCL低至少0.5毫秒时,设备进入关机模式。如果SCL从低到高,驱动器在100μs内进入待机模式,默认寄存器值设置如图5所示。只要VCM U电流寄存器设置为零以外的值,则进入激活模式。
VCM电流可通过I2C接口和VCM U电流寄存器进行控制。当一个振铃镜头被连接到一个被阻尼的镜头位置时,一个振铃镜头被改变。每当VCM U电流寄存器中的电流值发生变化时,通过生成一个优化的斜坡来对机械振铃进行内部补偿。这使得一个快速的自动对焦算法和愉快的用户体验。
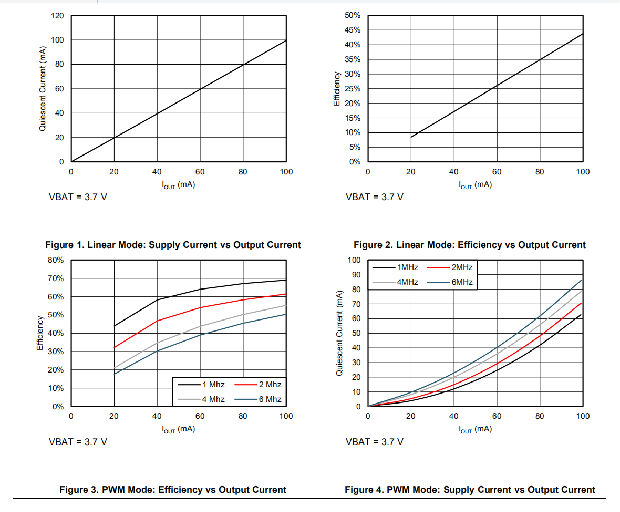
VCM中的电流可以通过线性或PWM控制产生。在线性模式下,高压侧PMOS配置为电流源,电流由VCM U电流控制寄存器设置。在PWM控制中,VCM由半桥驱动器驱动。通过PWM控制,VCM电流通过高压侧PMO连接VBAT和GND之间的VCM,然后通过感应电阻器和低压侧NMO释放到“自由转动”模式。PWM模式开关频率可通过控制寄存器从0.5 MHz到4 MHz进行选择。可使用模式寄存器中的PWM/LIN位选择PWM或线性模式。
功能框图
特性描述
VCM驱动器输出级操作
VCM中的电流可通过线性或PWM模式输出级进行控制。输出级在激活模式下启用,可通过VCM U电流控制寄存器进行控制,输出级模式从模式寄存器位PWM/LIN中选择。
在线性模式下,输出PMOS被配置为高压侧电流源,电流可以从VCM U电流寄存器进行控制。
在PWM控制中,VCM由半桥驱动器驱动。通过PWM控制,VCM电流通过高压侧PMO连接VBAT和GND之间的VCM,然后通过感应电阻器和低压侧NMO释放到“自由转动”模式。VCM中的电流由一个1Ω的感应电阻感测,该电阻连接到误差放大器输入端,另一个输入端由10位DAC输出端控制。PWM模式开关频率可通过控制寄存器从0.5 MHz到4 MHz进行选择。可使用模式寄存器中的PWM/LIN位选择PWM或线性模式。
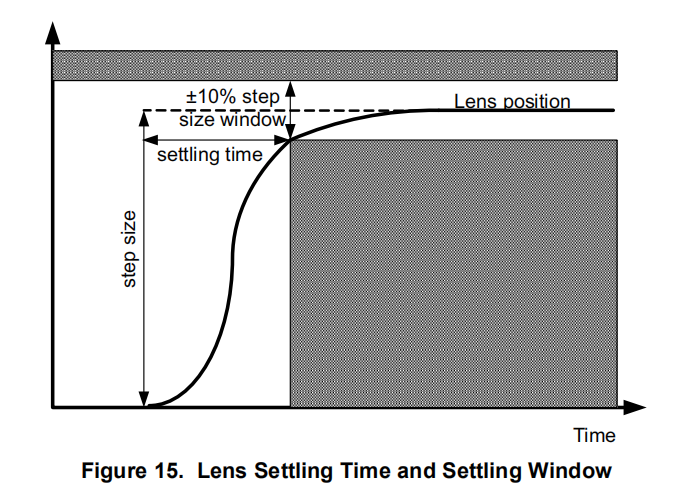
振铃补偿
VCM电流可通过I2C接口和VCM U电流寄存器进行控制。镜头组连接到一个弹簧,当电流改变时,该弹簧会在镜头位置产生阻尼响铃。每当VCM U电流寄存器中的电流值发生变化时,通过生成一个优化的斜坡来对机械振铃进行内部补偿。这使得一个快速的自动对焦算法和愉快的用户体验。
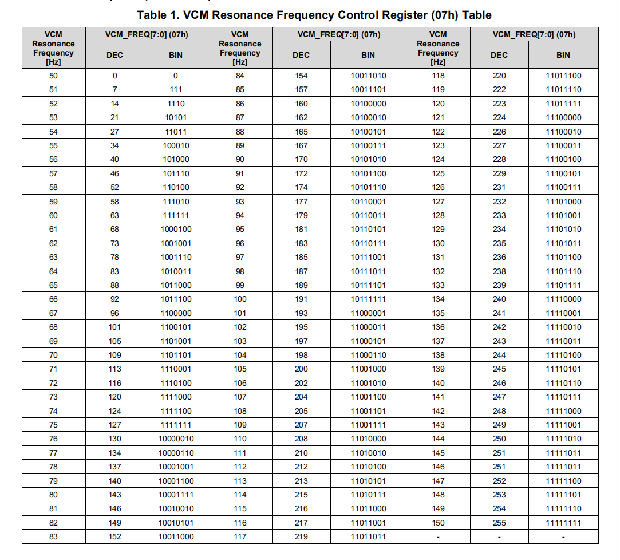
振铃补偿取决于VCM谐振频率,这可以通过VCM频率寄存器(07h)从50 Hz到150 Hz进行控制。表1显示了以1-Hz为步长的每个谐振频率的VCM_频率寄存器设置。如果有更精确的共振频率,控制值可以用方程式1计算。
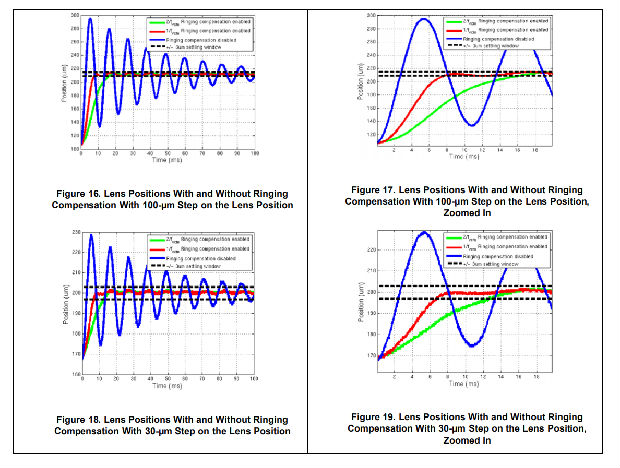
振铃补偿的设计方法是,当使用2/fVCM补偿时,它可以容忍VCM共振频率的±30%的频率变化,而对于1/fVCM则可以容忍±10%的变化,因此生产中只需要VCM的统计数据。
设备功能模式
操作模式
关闭:如果驾驶员检测到SCL的直流电平低于0.63V并持续至少0.5ms,驾驶员将进入关机模式。这是最低功率运行模式。只要驱动器在SCL中保持低,关闭引脚就会保持。
备用物品:如果SCL从低到高,驱动程序进入待机模式并设置默认寄存器值。在这种模式下,寄存器可以通过I2C接口写入。当VCM U电流寄存器设置为零时,设备将处于待机模式。如果设置了控制寄存器的第一位,则设备将从活动模式进入待机状态。在这种情况下,所有寄存器将重置为默认值。
如果发生以下任一故障,则从激活模式进入待机模式:过热保护故障(OTPF)、VCM短路(VCM)或VCM打开(VCMO)。当由于故障状态进入待机模式时,电流寄存器被清除。
激活:当VCM U电流控制通过I2C接口设置为零以外的值时,设备处于活动模式。在活动模式下,VCM驱动器输出级始终处于启用状态,从而导致更高的功耗。在设置控制寄存器中的第一个SW位、SCL拉低持续0.5毫秒、VCM U电流控制设置为零或发生以下任何故障之前,设备保持激活模式:过热保护故障(OTPF)、VCM短路(VCMS)或VCM开路(VCMO)。如果故障后进入激活模式,状态寄存器将自动清除。
编程
I2C总线操作
I2C总线是控制器和一系列从机终端之间的通信链路。该链路使用由串行时钟信号(SCL)和串行数据信号(SDA)组成的两线总线建立。在串行数据线是双向的,用于控制器和从机终端之间的数据通信的所有情况下,串行时钟都来自控制器。每个设备都有一个漏极开路输出,用于在串行数据线上传输数据。必须在串行数据线上安装一个外部上拉电阻器,以便在数据传输过程中将漏极输出拉高。
DRV201A拥有一个从I2C接口,支持高达400kbit/s的数据速率和自动增量寻址,并符合I2C标准3.0。
DRV201A支持四种不同的读操作和两种不同的写入操作:从定义位置进行单次读取、从当前位置进行单次读取、从定义位置开始的顺序读取、从当前位置开始的顺序读取、到定义位置的单次写入、从定义位置开始的顺序写入。下面介绍所有不同的读写操作。
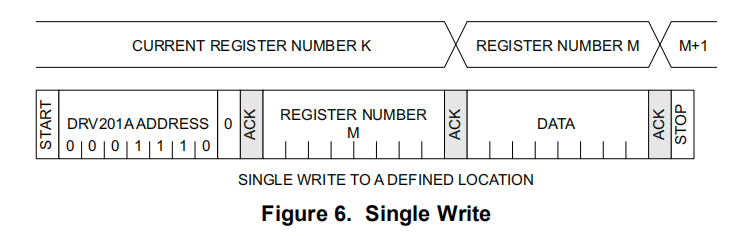
单次写入指定位置
图6显示了对已定义寄存器的单次写入的格式。首先,主机发出一个启动条件,后跟一个7位I2C地址。接下来,主机写入一个0来执行写操作。从机接收到应答后,主设备通过总线写入8位寄存器号。在第二次确认之后,DRV201A将I2C寄存器设置为一个定义的值,主机通过总线写入8位数据值。在接收到第三个确认后,DRV201A自动将内部I2C寄存器编号增加一个,主设备发出停止条件。此操作结束寄存器写入。
从定义位置和当前位置进行单次读取
图7显示了从一个定义的位置读取的格式。首先,主机发出一个启动条件,后跟一个7位I2C地址。接下来,主机写入一个0来执行写操作。从机接收到应答后,主设备通过总线写入8位寄存器号。在第二次确认之后,DRV201A将内部I2C寄存器编号设置为定义的值。然后主机发出一个重复启动条件和一个7位I2C地址,然后是一个地址来执行读取操作。在接收到第三个确认后,主设备将总线释放到DRV201A。然后DRV201A通过总线从寄存器写入8位数据值。主机确认接收到这个字节并发出停止条件。此操作结束寄存器读取。
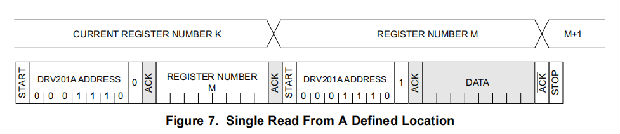
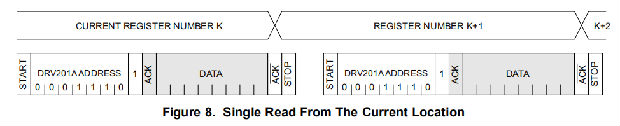
图8显示了从当前位置进行的单个读取。如果在没有首先定义寄存器号的情况下发出read命令,DRV201A从设备存储器中写出当前寄存器中的数据。
顺序读写
顺序读写允许对DRV201A寄存器进行简单而快速的访问。图9显示了从一个已定义位置的顺序读取。如果主机在给出ACK后没有发出停止条件,DRV201A会自动递增寄存器号并从下一个寄存器写入数据。

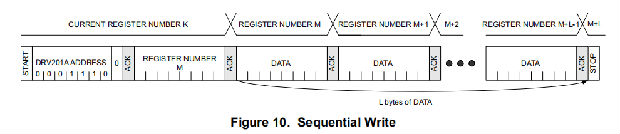
图10显示了顺序写入。如果主机在给出ACK后没有发出停止条件,DRV201A会自动将它的寄存器递增一个,主机可以写入下一个寄存器。
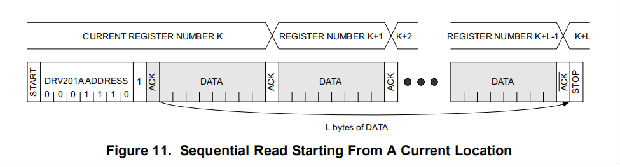
如果在没有先写入寄存器值的情况下开始读取,那么DRV201A将从当前位置写入数据。如果主机在给出ACK后没有发出停止条件,DRV201A会自动递增I2C寄存器并写出数据。这会一直持续到主机发出停止条件。如图11所示。
IC设备地址、启动和停止条件2
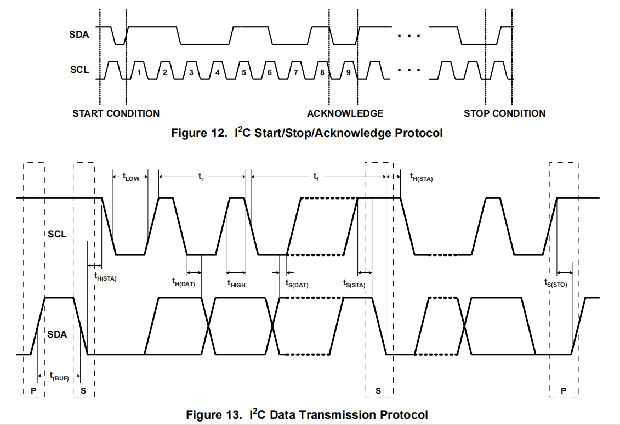
数据传输由控制器的起始位启动,如图12所示。当SDA线在SCL信号的高部分从高转换到低时,可以识别启动条件。接收到起始位后,设备将接收SDA输入上的串行数据,并检查有效的地址和控制信息。SDA数据由DRV201A锁存在SCL线的上升沿。如果为设备设置了适当的设备地址位,DRV201A在第8位被锁存后,通过将SDA线拉低到下一下降沿发出ACK。SDA保持在低水平,直到SCL线的下一个下降沿。
数据传输通过接收停止条件或接收发送到设备的数据字来完成。停止条件被认为是在SCL信号的高部分期间SDA输入的从低到高的转换。SDA线的所有其他跃迁必须在SCL信号的低部分发生。在接收到有效地址、子地址和数据字后发出确认。参考图13。
应用与实施
注意
以下应用章节中的信息不是TI组件规范的一部分,TI不保证其准确性或完整性。TI的客户负责确定组件的适用性。客户应验证和测试其设计实现,以确认系统功能。
申请信息
DRV201A设备是一种音圈电机驱动器,专为相机自动对焦控制而设计。该设备允许对VCM进行高效的PWM电流控制,同时减少镜头振铃,从而显著缩短镜头自动对焦所需的时间。以下设计是DRV201A设备的一个常见应用。
VCM机械振铃频率
振铃补偿取决于VCM谐振频率,这可以通过VCM频率寄存器(07h)从50 Hz到150 Hz进行控制。振铃补偿的VCM机械振铃频率可使用公式3选择。公式给出了VCM_FREQ[7:0]寄存器值(十进制),该值应四舍五入到最接近的整数。
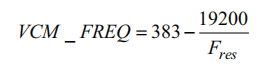
默认VCM机械振铃频率为76.4赫兹。

典型应用
应用曲线
电源建议
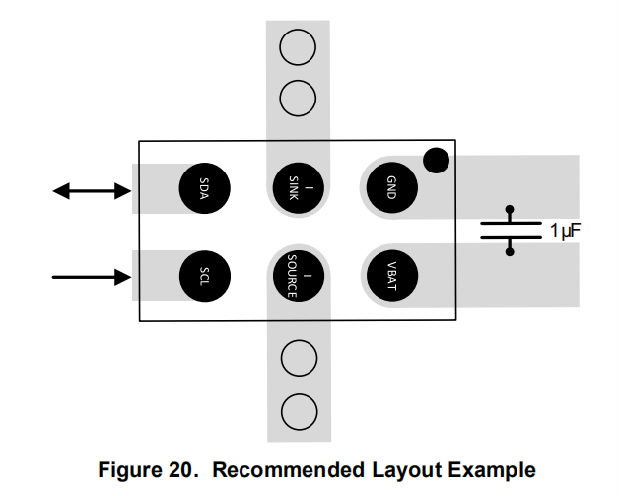
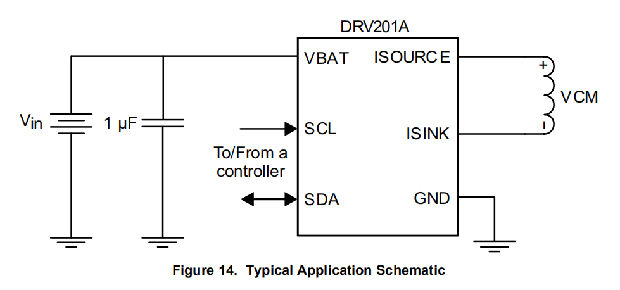
DRV201A设备设计为在2.5至4.8 V的输入电压供应VBAT下工作。用户必须在VBAT和GND引脚附近放置至少一个额定电压至少为6.3 V的1-uF陶瓷旁路电容器。
布局
布局指南
应使用低ESR陶瓷旁路电容器将VBAT引脚旁路至GND,建议值至少为1-μF,额定值至少为6.3V。将该电容器放置在尽可能靠近VBAT和GND引脚的地方,并将其与设备GND引脚进行粗线或接地平面连接。
布局示例