AD5161点击型号即可查看芯片规格书
特征
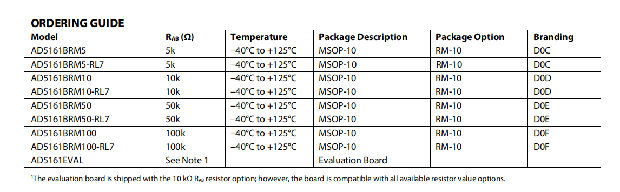
*256位端到端电阻5 kΩ、10 kΩ、50 kΩ、100 kΩ
*紧凑型MSOP-10(3 mm×4.9 mm)包装
*引脚选择SPI/I2C兼容接口
*额外包地址解码引脚AD0
*雨刮器寄存器的完全读/写
*打开预设到中刻度的电源
*单电源2.7 V至5.5 V
*低温系数45 ppm/℃
*低功耗,IDD=8微安
*宽工作温度–40°C至+125°C
*SDO输出允许多设备菊花链
*提供评估委员会
应用
*新设计中机械电位器的更换
*压力、温度、位置的传感器调整,
*化学和光学传感器
*射频放大器偏压
*汽车电子调整
*增益控制和偏移调整
概述
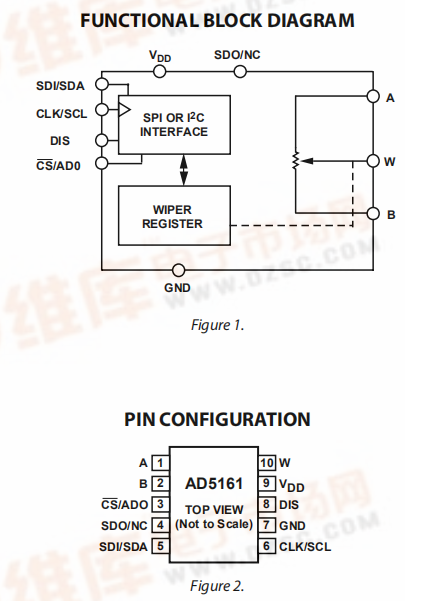
AD5161为256个位置调整应用提供了紧凑的3毫米×4.9毫米封装解决方案。这些器件执行与机械电位器或可变电阻器相同的电子调节功能,具有增强的分辨率、固态可靠性和优越的低温系数性能。
雨刮器设置可通过一个可选择插针的SPI进行控制或与I2C兼容的数字接口,也可用于读取雨刮器寄存器内容。当使用SPI模式时,设备可以菊花链(SDO到SDI),允许多个部件共享同一控制线。在I2C模式下,地址引脚AD0可用于在同一总线上放置最多两个设备。在同一模式下,命令位可用于将刮水器位置重置到中刻度或关闭装置进入零功耗状态。
在2.7伏至5.5伏电源下工作,耗电量小于5微安,可用于便携式电池供电应用。
注:术语数字电位计、虚拟现实和RDAC可以互换使用。
典型性能特征
测试电路
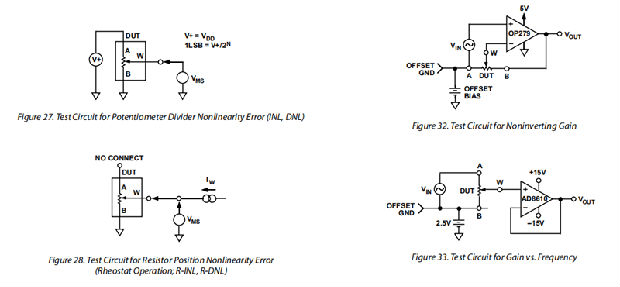
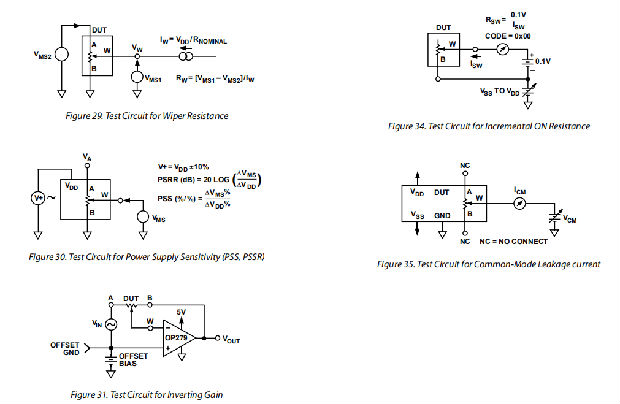
图27到图35说明了定义产品规格表中使用的试验条件。
SPI接口
I2C接口
S=启动条件
P=停止条件
A=确认
X=不在乎W=写
R=读取
RS=将雨刮器复位到中刻度80小时
SD=关机将雨刮器连接到B端子并断开A端子。它不改变雨刮器寄存器的内容。
D7、D6、D5、D4、D3、D2、D1、D0=数据位
操作
AD5161是一个256位数字控制可变电阻(VR)装置。
内部电源开启预设将雨刮器置于中刻度在通电过程中,简化了通电时的故障状态恢复。
可变电阻编程
变阻器操作
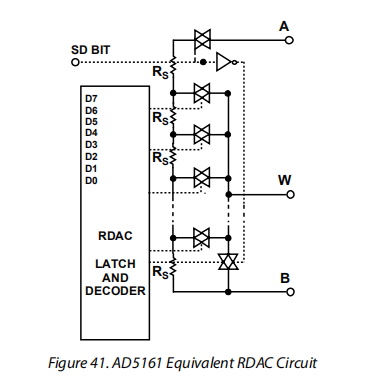
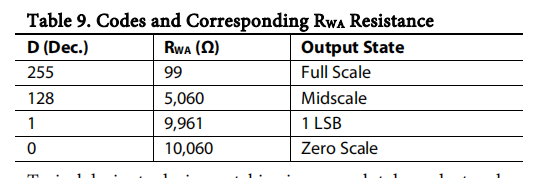
端子A和B之间的RDAC的标称电阻为5 kΩ、10 kΩ、50 kΩ和100 kΩ。零件号的最后两位或三位数字决定了标称电阻值,例如10 kΩ=10;50 kΩ=50。VR的标称电阻(R)有256个接触点,通过刮水器端子和B端子接触。RDAC锁存器中的8位数据被解码以选择256个可能设置中的一个。假设使用10 kΩ部件,则雨刮器的第一个连接从数据0x00的B端子开始。由于存在60Ω的雨刮器接触电阻,这种连接在端子W和B之间产生最小60Ω的电阻。第二个连接是第一个抽头点,对应于数据0x01为99Ω(R=R/256+R=39Ω+60Ω)。第三个连接是下一个抽头点,表示数据0x02为177Ω(2×39Ω+60Ω),以此类推。每增加一个LSB数据值,雨刮器就会向上移动电阻梯,直到最后一个抽头点达到9961Ω(R–1 LSB+R)。图41显示了等效RDAC电路的简化图,其中最后一个电阻串将无法访问;因此,除雨刮器电阻外,满标度下的标称电阻的LSB要小1。
确定W和B之间数字编程输出电阻的一般公式是:
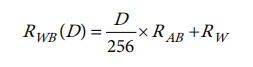
其中,D是加载在8位RDAC寄存器中的二进制代码的十进制等效值,R是端到端电阻,R是由内部开关的导通电阻产生的雨刮器电阻。
总之,如果R=10 kΩ且A端子开路,将为所示的RDAC锁存代码设置以下输出电阻R。
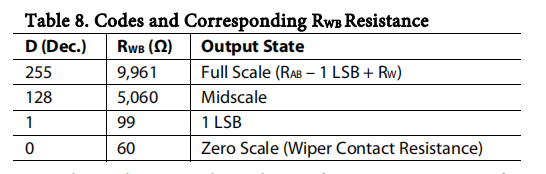
注意,在零刻度条件下,存在60Ω的有限雨刮器电阻。在这种状态下,应注意将W和B之间的电流限制在不超过20毫安的最大脉冲电流。否则,可能会导致内部开关触点退化或损坏。
与机械电位器类似,刮水器W和端子A之间的RDAC电阻也产生数字控制的互补电阻R。使用这些端子时,B端子可以打开。设置R的电阻值从电阻的最大值开始,并随着锁存器中加载的数据值的增加而减小。这个操作的一般方程式是:
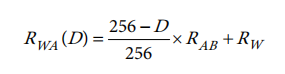
如果R=10 kΩ且B端子开路,将为所示的RDAC锁存代码设置以下输出电阻R。
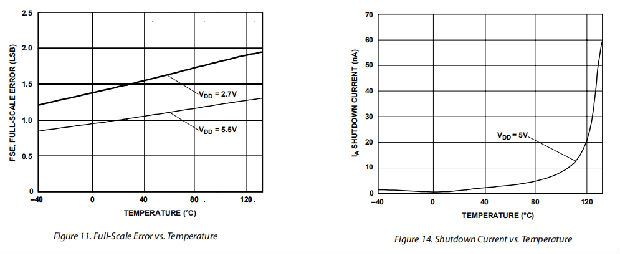
典型的设备对设备匹配取决于工艺批次,其变化可能高达±30%。由于电阻元件采用薄膜技术加工,因此R随温度的变化具有非常低的45 ppm/℃温度系数。
对电位计分压器编程
电压输出操作
数字电位器很容易在雨刮器到B和雨刮器到a的位置生成与a到B的输入电压成比例的分压器。与V到GND的极性(必须为正)不同,a-B、W-a和W-B之间的电压可以是任意极性。
如果忽略雨刮器电阻对近似值的影响,将A端子连接到5 V,B端子连接到接地,则会在雨刮器连接到B时产生输出电压,从0 V开始,直到小于5 V的1 LSB。每个LSB的电压等于施加在AB端子上的电压除以电位计分压器的256个位置。定义施加在端子A和B上的任何有效输入电压相对于接地的V输出电压的一般方程式为:
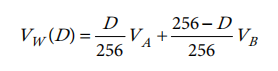
对于更精确的计算,包括雨刮器阻力V的影响,可以发现:
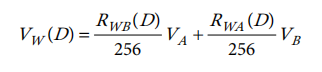
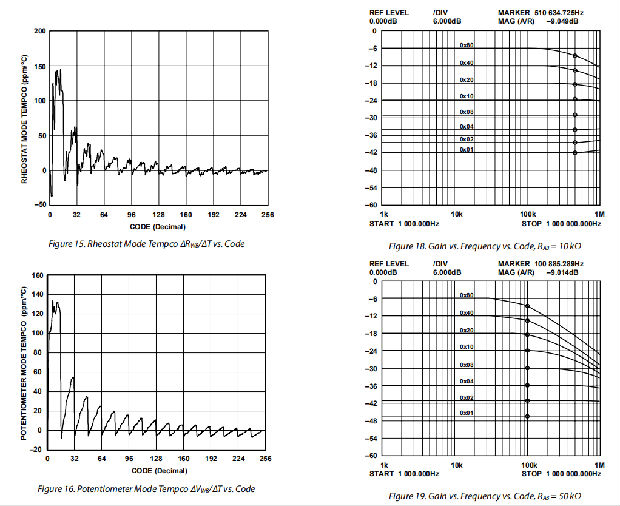
数字电位器在分压器模式下的操作会导致更精确的超温操作。与变阻器模式不同,输出电压主要取决于内部电阻R和R的比值,而不是绝对值。因此,温度漂移降低到15ppm/℃。
引脚选择数字接口
AD5161提供了可选接口的灵活性。当数字接口选择(DIS)引脚连接低时,SPI模式接通。当DIS引脚连接高时,IC模式接通。
SPI兼容3线串行总线(DIS=0)
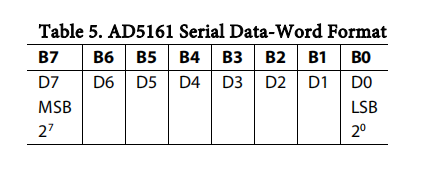
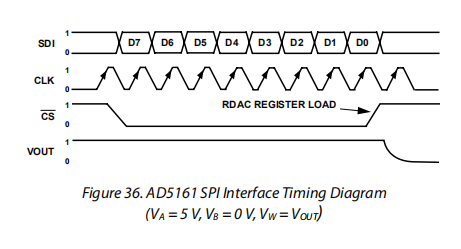
AD5161包含一个3线SPI兼容数字接口(SDI、CS和CLK)。必须先加载8位串行字MSB。单词的格式如表5所示。
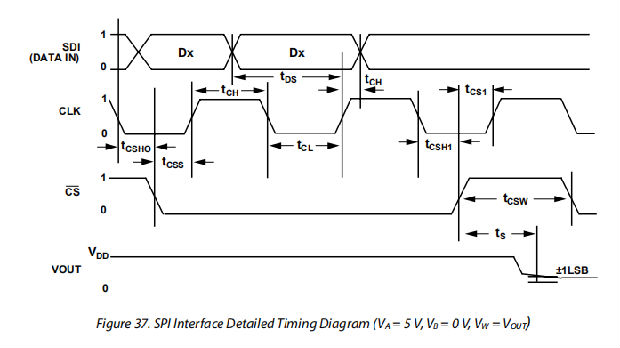
正边缘敏感CLK输入需要干净的转换,以避免将不正确的数据计时到串行输入寄存器中。标准逻辑族工作良好。如果使用机械开关进行产品评估,则应通过触发器或其他合适的方法。当CS低时,时钟将数据加载到每个正时钟边缘的串行寄存器中(见图36)。
规范表中的数据设置和数据保持时间确定了有效的计时要求。AD5161使用8位串行输入数据寄存器字,当CS线返回逻辑高电平时,该字被传输到内部RDAC寄存器。忽略多余的MSB位。
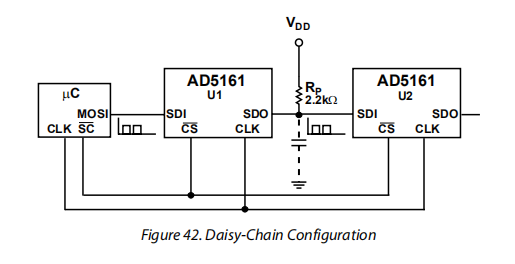
菊花链操作
串行数据输出(SDO)引脚包含一个开漏N通道FET。此输出需要一个上拉电阻器,以便将数据传输到下一个软件包的SDI引脚。这允许从单处理器串行数据线菊花链几个RDAC。上拉电阻端接电压可以大于V电源电压。建议在下列设备的SDI引脚上使用上拉电阻器时增加时钟周期,因为设备之间的菊花链节点SDO-SDI处的电容负载可能会导致后续设备的时间延迟。用户应该意识到这个潜在的问题,以便成功地实现数据传输(参见图42)。如果两个AD5161s是菊花链,则至少需要16位数据。前8位,符合格式如表5所示,转到U2,然后用同样的格式转到U1。在所有16位进入各自的串行寄存器。在此之后,将CS拉高以完成操作并加载RDAC闩锁。如果CS低位期间的数据字大于16位,则将丢弃任何附加的msb。
I2C兼容2线串行总线(DIS=1)
AD5161也可以通过一个与IC兼容的串行总线进行控制。RDAC作为从设备连接到此总线。
AD5161的第一个字节是从地址字节(见表6以及表7)。它有一个7位从机地址和一个R/W位。从机地址的六个msb是010110,以下位由设备的AD0 pin的状态决定。AD0允许用户在一条总线上放置最多两个与IC兼容的设备。
2线IC串行总线协议操作如下:
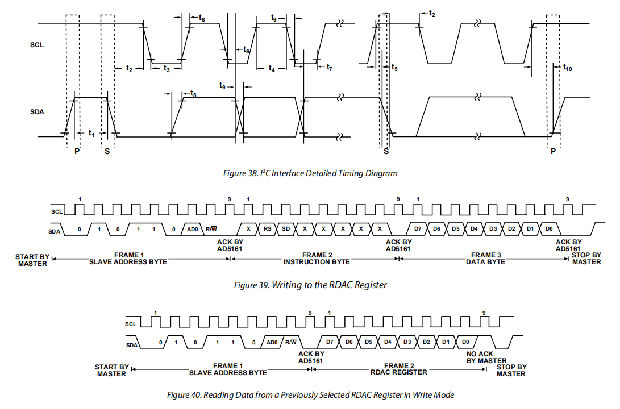
1、主机通过建立一个启动条件来启动数据传输,即当SCL高时,SDA线路上发生从高到低的转换(见图39)。下面的字节是从地址字节,它包括7位从机地址,后跟一个R/W位(该位决定从机设备读取还是写入数据)。
其地址对应于发送地址的从机通过在第九时钟脉冲期间将SDA线拉低来响应(这称为确认位)。在此阶段,总线上的所有其他设备保持空闲,而所选设备等待数据写入或读取它的串行寄存器。如果R/W位高,主机将读取从从设备。另一方面,如果R/W位较低,主设备将写入从设备。
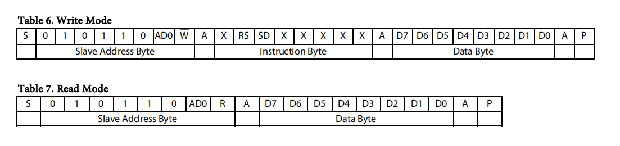
2、写操作包含读操作不包含的额外指令字节。这种写模式的指令字节跟随从地址字节。指令字节的第一位(MSB)是一个不需要关心的字节。
第二个MSB,RS,是中刻度重置。该位上的逻辑高将雨刮器移动到中心抽头,R=R。此功能有效地覆盖寄存器的内容,因此,当退出重置模式时,RDAC将保持在中刻度。
第三个MSB,SD,是一个关闭位。当雨刮器对端子B短路时,逻辑高导致端子A断路。此操作在变阻器模式下产生几乎0Ω,在电位计模式下产生0 V。需要注意的是,关机操作不会干扰寄存器的内容。关闭后,先前的设置将应用于RDAC。此外,在关机期间,可以对新设置进行编程。当零件从关闭状态返回时,相应的虚拟现实设置将应用于RDAC。指令字节中的其余位并不重要(见表6)。
3、在确认指令字节后,写入模式中的最后一个字节是数据字节。数据以9个时钟脉冲(8个数据位后跟一个确认位)的顺序通过串行总线传输。SDA线上的跃迁必须发生在SCL低期,并在SCL高期保持稳定(见表6)。
4、在读取模式下,数据字节紧跟在从机地址字节的确认之后。数据以9个时钟脉冲的顺序通过串行总线传输(与写入模式略有不同,其中有8个数据位后跟一个确认位)。同样,SDA线上的跃迁必须发生在SCL低期,并在SCL高期保持稳定(见图40)。
5、当所有数据位都已被读取或写入时,主机将建立一个停止条件。停止条件定义为当SCL高时SDA线上的从低到高的转换。在写入模式下,主机将在第十个时钟脉冲期间将SDA线拉高,以建立停止条件(见图39)。在读取模式下,主机将对第九个时钟脉冲发出“否”确认(即,SDA线路保持高电平)。然后,在第十个时钟脉冲变高以建立停止条件之前,主设备将使SDA线变低(见图40)。
重复写入功能使用户可以灵活地在仅寻址和指示一次零件后多次更新RDAC输出。在写入周期中,每个数据字节将更新RDAC输出。例如,在RDAC确认其从机地址和指令字节之后,RDAC输出将在这两个字节之后更新。如果另一个字节被写入RDAC,而它仍然被寻址到具有相同指令的特定从设备,则该字节将更新所选从设备的输出。如果需要不同的指令,写入模式必须以新的从机地址、指令和数据字节重新开始。同样,也允许RDAC的重复读取功能。
回读RDAC值
AD5161允许用户在读取模式下读取RDAC值。编程格式见表6和表7。
一条总线上有多个设备
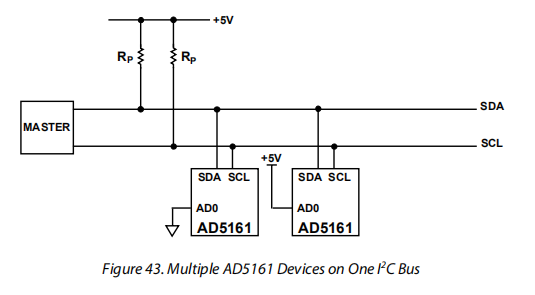
图43显示了同一串行总线上的两个AD5161设备。由于AD0管脚的状态不同,每个管脚都有不同的从机地址。这使得每个设备中的每个RDAC都可以独立地写入或读取。主设备输出总线驱动程序是完全集成电路兼容接口中的开漏下拉式。
双向接口电平变换
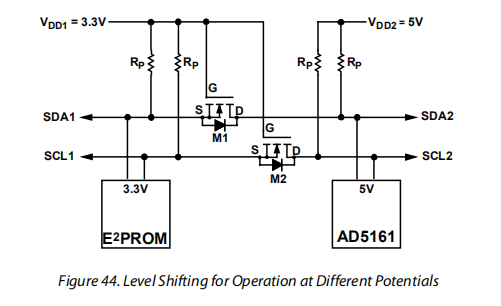
虽然大多数传统系统可以在一个电压下运行,但是可以在另一个电压下优化新组件。当两个系统在两个不同电压下运行同一信号时,需要适当的电平偏移。例如,可以使用3.3v的EPROM与5v数字电位器接口。为了实现双向通信,需要一种电平移位方案,以便数字电位器的设置可以存储到EPROM中并从EPROM中检索。图44显示了其中一个实现。M1和M2可以是任何N通道信号fet,或者如果V低于2.5v,则可以是低阈值fet,例如FDV301N。
ESD保护
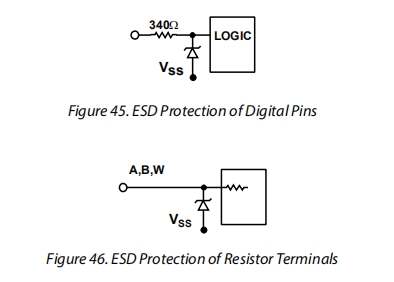
所有数字输入均采用串联输入电阻器和并联齐纳ESD结构进行保护,如图45和图46所示。这适用于数字输入引脚SDI/SDA、CLK/SCL和CS/AD0标准。
终端电压工作范围
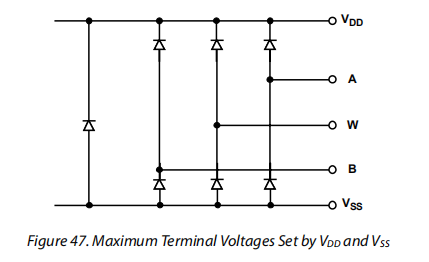
AD5161V和GND电源定义了3端数字电位器正常工作的边界条件。端子A、B和W上出现的超过V或GND的电源信号将被内部正向偏置二极管钳制(见图47)。
通电顺序
由于ESD保护二极管限制了端子A、B和W处的电压符合性(见图47),因此在向端子A、B和W施加任何电压之前,为V/GND供电是很重要的;否则,二极管将被正向偏置,从而使V无意中通电,并可能影响用户电路的其余部分。理想的通电顺序是:接地,V,数字输入,然后是V。只要在V/GND之后通电,V,V和数字输入的相对顺序并不重要。
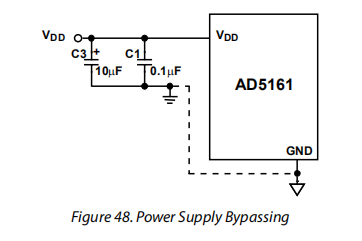
布局和电源旁路
采用紧凑、最小引线长度的布局设计是一个良好的实践。通向输入端的导线应尽可能直接,导线长度最小。接地路径应具有低电阻和低电感。
同样,为了获得最佳的稳定性,用高质量的电容器旁路电源也是一个很好的做法。应使用0.01μF至0.1μF的片状或片状陶瓷电容器绕过设备的电源线。还应在电源处使用低ESR 1μF至10μF的钽或电解电容器,以尽量减少任何瞬态干扰和低频波动(见图48)。请注意,数字地面也应远程连接到模拟地面的一个点,以尽量减少地面反弹。
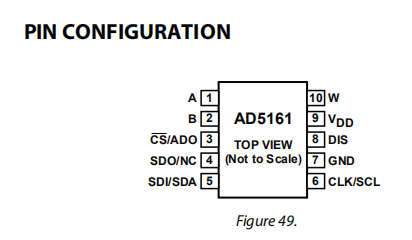
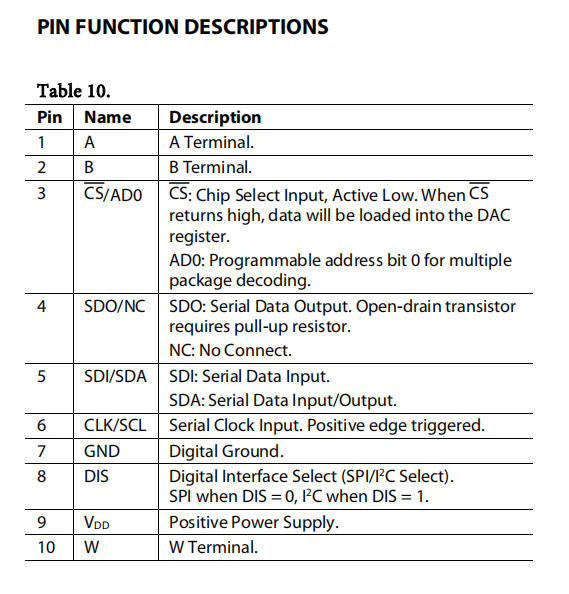
引脚配置和功能说明
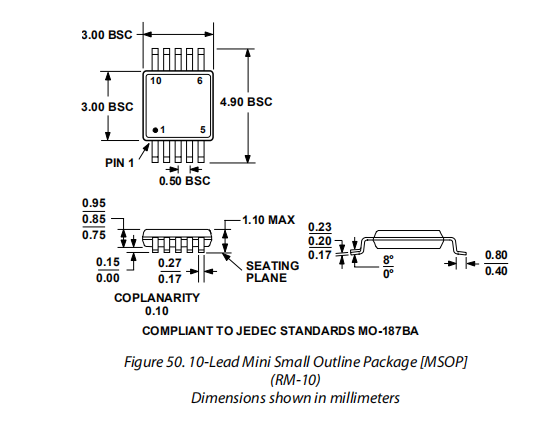
外形尺寸
AD5161包含2532个晶体管。模具尺寸:30.7 mil×76.8 mil=2358 sq.mil。
