特征
*用于A8902CLBA销更换的销
*启动换向电路
*无传感器换向电路
*选择外部扇区数据转速表信号
*外部速度控制选项
*振荡器工作频率高达20 MHz
*可编程过电流限制
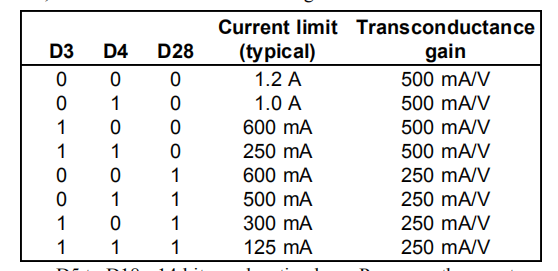
*跨导增益选项:500毫安/伏或250毫安/伏
*可编程看门狗定时器
*方向控制
*串行端口接口
*TTL兼容输入
*实时输出系统诊断数据
*通过串行口或外部终端进行动态制动
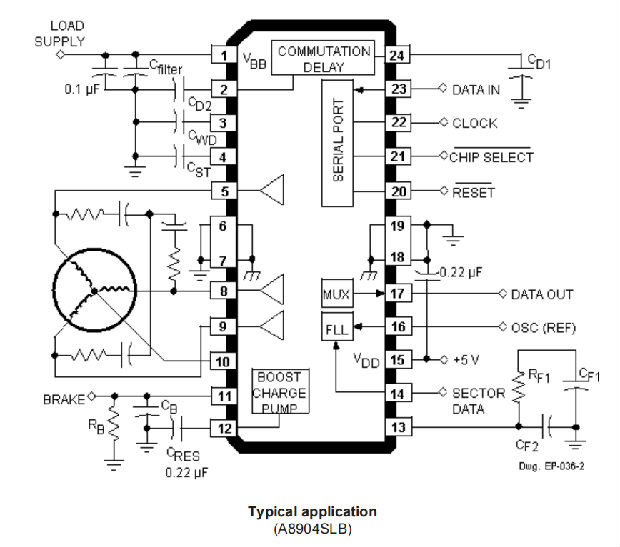
A8904SLB和A8904SLP是三相无刷直流电动机控制器/驱动器设计用于需要精确控制高速电机的应用。三个半桥输出是低导通电阻n通道DMOS器件,能够驱动高达1.2款A、 A8904提供完整、可靠、独立的反电动势感应、电机启动和运行算法。可编程数字锁相环速度控制电路和线性电流控制电路一起提供精确的电机速度调节。
串行端口允许用户对操作,例如速度控制参数、启动电流限制、睡眠模式、方向和诊断模式。
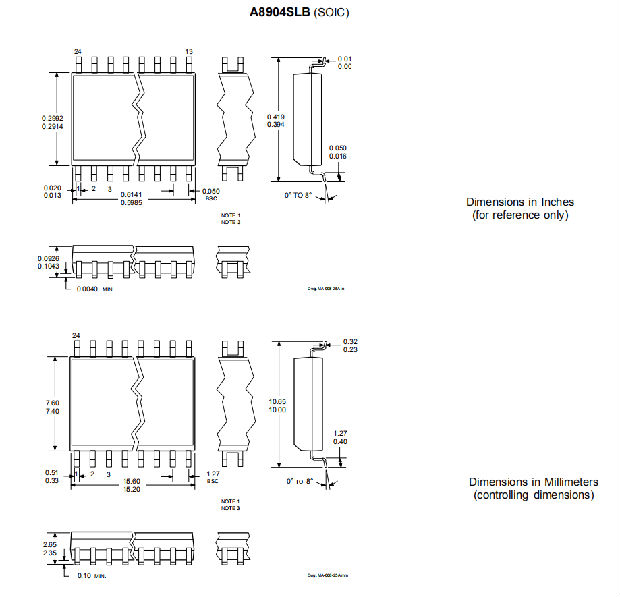
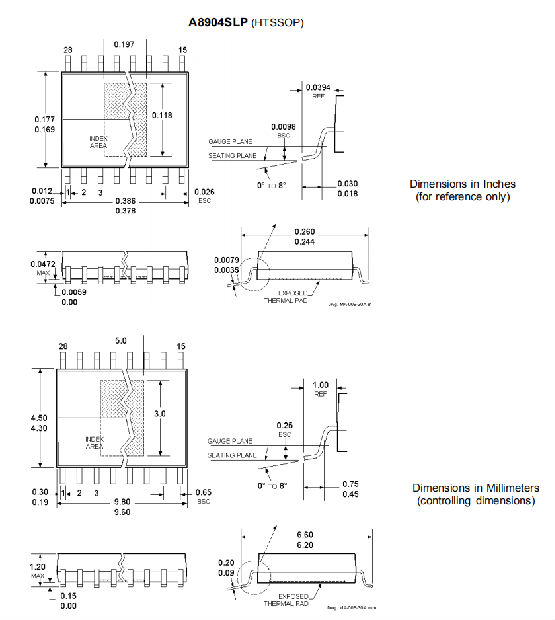
A8904采用Allegro的BCD(双极CMOS DMO)制作过程,一种先进的混合信号技术,结合了双极、模拟和数字CMOS以及DMOS功率器件。A8904SLB采用24引线宽体SOIC蝙蝠翼组件。A8904SLP采用薄(<1.2款mm),28铅SSOP封装,带外露热垫。每种包装类型都有无铅版本(100%哑光锡引线框架)。
始终按完整的零件号订购:
功能框图
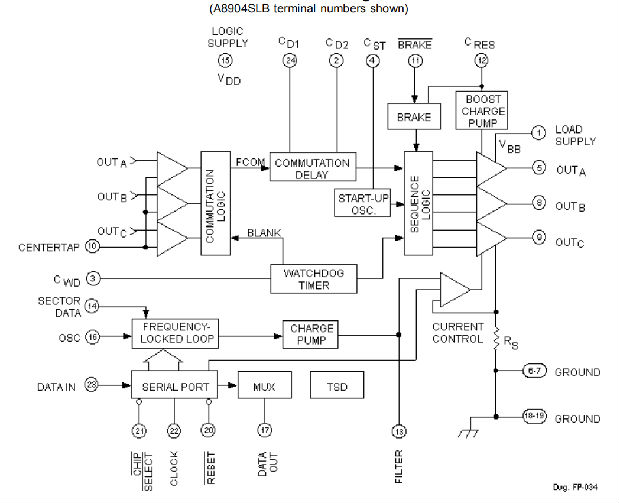
功能描述
操作概述。 每一个电旋转包含六个状态,控制三个半桥输出。通过自适应换相电路实现了从状态到状态的优化切换。在任何状态下,一个输出高,一个低,另一个高阻抗。高阻抗输出端的反电动势被感测并与中心抽头的电压进行比较,当两个信号相等时,FCOM信号切换。然后在序列器转换到下一个状态之前引入控制延迟。
采用线性电流模式控制,在保持极低电噪声排放的同时,对电机转速进行精确控制。速度控制是通过频率锁定环来实现的,频率锁定环处理感应到的定子相位反电动势信号,最终产生转速信号。然后将转速表信号与所需的编程速度进行比较,以产生误差。然后,误差信号被用于线性控制通过低侧DMOS电源设备的电流,以获得正确的速度。
可以引入替代控制方案,为用户提供最大的灵活性和针对每个应用程序的优化。应用于扇区数据输入的外部转速表信号以及内部速度参考可用于高精度速度控制。作为另一种选择,用户可以通过直接驱动滤波器终端来引入外部速度控制。
启动程序是解决方案中固有的,以确保可靠的启动。在启动过程中,扬克特性允许快速过渡到过滤器终端的标称工作条件。当使用外部速度控制时,此功能也可用。
动态制动可以通过外部制动终端或通过串行端口中的制动位引入。
串行端口允许用户编程各种特性和操作模式,例如电机速度、内部或外部速度控制、内部或外部速度参考、电流限制、睡眠模式、方向、充电电流(用于消隐脉冲)、电机极、跨导增益和各种诊断输出。
全装置保护包括可编程过电流限制、热关机和逻辑电源欠压关机。
电源输出。 A8904的功率输出是n通道DMOS晶体管,总源极加上接收器rDS(on)通常为1Ω。内部电荷泵在负载电源上方提供电压轨,用于驱动高侧DMOS栅极。本征接地钳位和反激二极管在切换电感负载时提供保护。这些二极管还将在断电情况下校正电机反电动势。如有必要,可通过在电源和负载电源(VBB)之间连接外部肖特基功率二极管或串联传递FET来提供瞬态电压电源。这种场效应晶体管或二极管有效地隔离了通过电源的低阻抗路径。滤波器电容器还需要“保持”整流信号,并连接在负载电源和接地之间。
反电动势感应电动机起动和运行算法。A8904提供了一个完整的自给式反电动势感应,启动和运行换向方案。具有六种状态的状态机(在下表中显示了正向和反向)控制三个半桥输出。在每个状态下,一个输出为高(源电流),一个输出为低(下沉电流),一个输出为关(高阻抗或“Z”)。在关闭的输出端感应到电机反电动势。
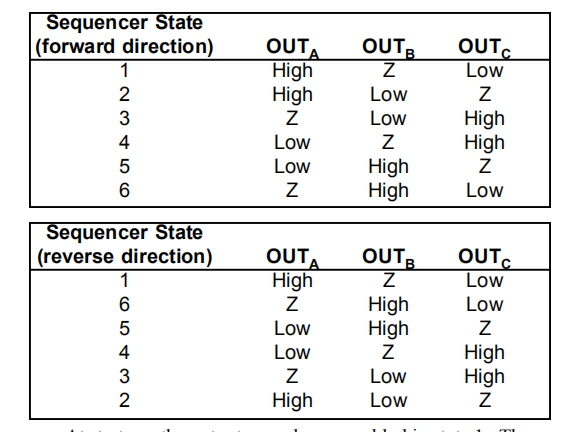
启动时,输出始终在状态1下启用。通过比较输出电压和电机中心抽头电压,在关闭输出时检查反电动势。然后,电机将向前、向后或保持静止(如果处于零扭矩位置)。
如果电机在初始启动状态下不移动,则启动振荡器会自动对输出进行交换。当检测到合适的反电动势信号时,启动振荡器被覆盖,并产生相应的定时时钟,提供同步反电动势换流。启动振荡器周期由:

其中CST是启动电容器。
如果电机移动,反电动势检测和方向电路将等待反电动势过零(通过中心抽头的输出过零)的正确极性。如果没有检测到反电动势的正确极性,则看门狗电路将对输出进行整流,直到检测到正确的反电动势。正确的反电动势感应由FCOM信号指示,该信号在反电动势完成过零时切换(见下面的波形)。数据输出终端提供FCOM。
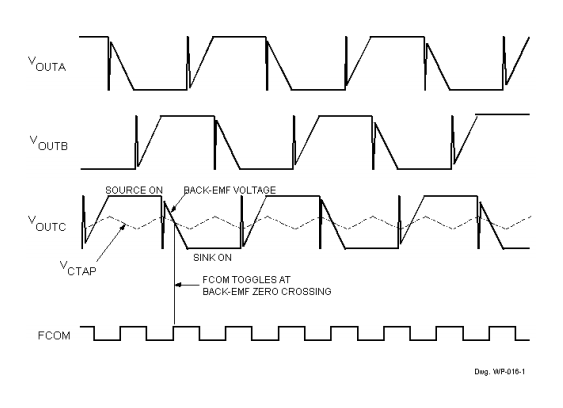
自适应换相延迟电路利用真反电势过零点,在适当的时间推进状态定序器(换相器),使电机同步运行。
自适应换相延迟。自适应换相延迟电路利用反电势过零指示信号(FCOM)来确定输出驱动器有效同步切换的最佳换相时间。当FCOM信号改变状态时,其中一个延迟电容器(CD1或CD2)以大约两倍于充电电流的速率放电。当电容器到达2.5条V阈值,发生换相。在此放电期间,另一个延迟电容器正在充电,以预期下一个FCOM状态变化。此外,充电中断由消隐持续时间设置(见下面的波形、VCWD和下一节)。这个额外的充电延迟导致换相发生在FCOM通断持续时间的50%以下,以补偿由绕组电感引起的延迟。
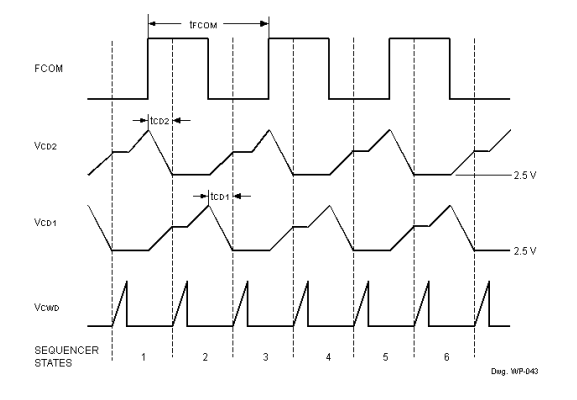
换相电容器(CD1)正常运行期间的典型三角电压变化范围为1.5条V和2.0条五、 换相电容值可由以下公式确定:
其中VCD=1.5条五、 ICD=20微安,t=(60/rpm)/(电机极x 3),每个状态的持续时间。
为避免电容器向供电轨充电,选择的值应提供足够的裕度,并考虑电容器容限、充电电流等的影响。
空白和看门狗计时功能。消隐和看门狗定时函数由一个定时电容CWD导出。
在正常换流过程中,在每个新的定序器状态开始时,产生一个消隐信号,直到看门狗电容器CWD充电到阈值VTL(见下面的波形)。该消隐信号禁止反电动势比较器在顺序状态转换期间因感应能量放电和电压稳定瞬态而跳闸。此消隐信号的持续时间取决于CWD电容器的大小和编程的充电电流ICWD(通过D2627)。该消隐脉冲还中断了换向延迟电容器CD1的充电。
选择CWD最小充电电流的能力在启动期间特别有用,因为二极管再循环电流的持续时间最高。在电机转速较高的应用中,可以增加充电电流,以使消隐周期不会明显侵入每个定序器状态的周期,并且不会导致换相点的不平衡。
建议在实际应用电路中选择CWD值,A8904进入阶跃模式。应重新选择CST(仅用于此测试),介于4.7条μF和10μF,使得电机在两个步骤之间停止,并且可以测量最大二极管导通时间。CWD的值可以确定为:

式中,td=测量的二极管传导,ICWD=启动时的充电电流,VTL=250 mV。
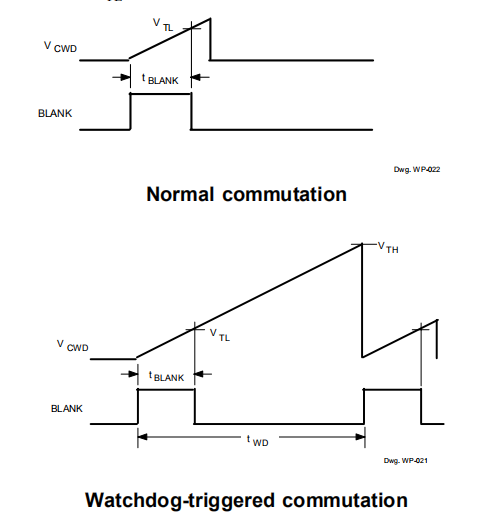
当看门狗电容器CWD充电至VTL阈值后,如果检测到反电动势信号的正确极性,反电动势检测电路将CWD放电至零伏(参见上面的波形),电路准备好检测下一个反电动势过零。
如果在消隐周期tBLANK和看门狗周期tWD之间没有检测到反电动势的正确极性,则反电动势检测电路不允许看门狗电容器CWD放电,并且看门狗电路将输出转换到下一个定序器状态(见上面的波形)。此操作模式继续,直到检测到合适的反电动势信号。此功能有助于防止过度反向旋转,并有助于与移动主轴重新同步(或启动)。
看门狗触发换向的持续时间由以下因素决定:

其中ICWD=正常充电电流。
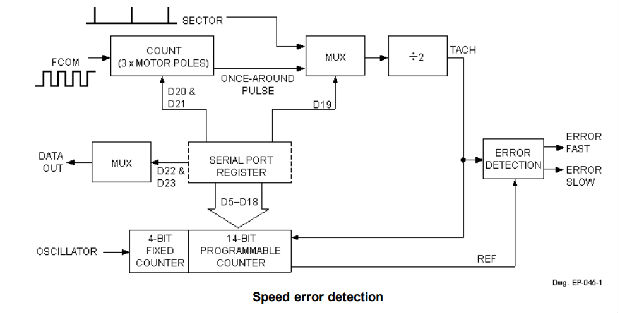
速度控制.电机的实际速度是通过内部感应后emf或通过扇区数据终端通过外部方案来测量的。从这些信号中产生转速信号,然后将其与所需转速进行比较,所需转速被编程到14位计数器中(见下图和波形-假设采用内部方案)。由此产生的误差信号,误差,然后用于充电或放电的滤波器终端电容器,这取决于电机运行是否太慢或太快。滤波器端电压用于线性驱动低边mosfet以匹配期望的速度。
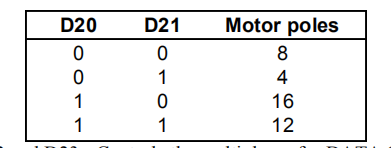
检测到的每个反电动势信号都会导致FCOM信号的状态改变。每机械旋转一周的FCOM转换次数等于极数乘以3。例如,对于四极电机(如下页所示),FCOM转换的次数将等于每机械旋转12次。极数通过串行端口位D20和D21编程。每转一圈有六个电状态,因此,在本例中,每转一圈有12个换相或两个电旋转。
转速表信号每机械转速改变一次状态,并提供有关实际电机转速的信息,也用于触发包含所需电机转速信息的REF计数器。或者,可以使用外部转速表信号,其解释在扇区模式部分中给出。
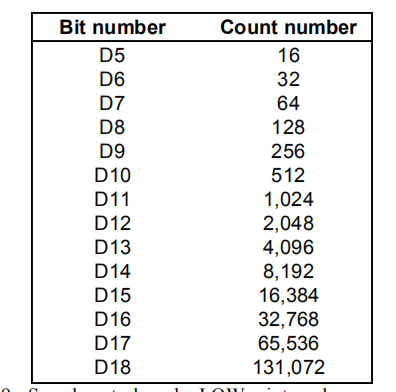
REF的持续时间是通过对计数器进行编程来设置的,以根据以下内容计算所需的振荡器周期数:
总计数=60 x fOSC/所需电机转速(rpm)
其中,总计数(振荡器周期数)等于通过串行端口中的位D5到D18选择的计数数之和,并且fOSC对应于振荡器频率。
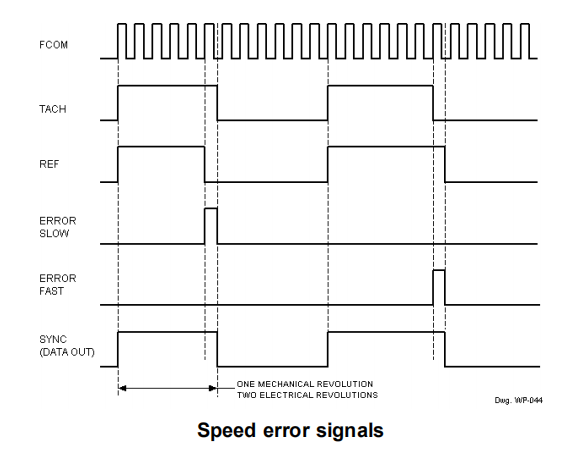
速度误差信号
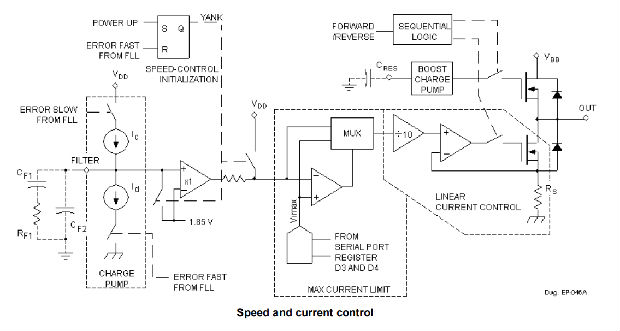
通过积分转速表和参考信号之间的差异产生速度误差信号。如果转速表信号在REF信号之前变低,则产生快速误差;如果转速表信号在REF信号之后变低,则产生慢速误差。产生的错误信号使适当的电流源(见下页的图表)能够对滤波器端子上的滤波器元件进行充电或放电。
然后,滤波器电压用于通过跨导级在绕组中提供线性电流控制(见下页的图表)。通过内部感测电阻器RS感测输出电流。感测电阻器上的电压与滤波器端子上电压的十分之一减去滤波器阈值电压的最小值或最大电流限制参考值进行比较。
或者,可以通过禁用频率锁定环路电路(D24=1)引入滤波器终端的外部控制。
跨导函数定义为:

其中RS名义上为200 mΩ,VFILTERTH大约是1.85分五、 G=1,当D28=0,增益=500毫安/伏或G=2,当D28=1,增益=250毫安/伏。
整个系统的闭环控制响应是通过在滤波端引入的滤波元件来形成的。
将电流钳制到串行端口(D3和D4)定义的水平可提供输出电流限制保护。这种特性在遇到高瞬变电流时特别有用,例如,在启动过程中。一旦达到正常运行条件,可适当降低电流限制。请注意,电流限制是根据所选的gm值缩放的。
扇区模式。外部转速表信号,如扇形或指数脉冲,可用于产生转速表信号,而不是内部产生的一次性方案。外部信号应用于扇区数据终端,必须对串行端口位(D19=1)进行编程以启用此功能。
在使用内部和外部转速表信号的应用中,当数据输出的同步信号较低时,仅在模式之间切换是很重要的。这可以确保在转换过程中处理的速度控制信息不会损坏。同步是通过数据输出多路复用器,这是由D22和D23控制。
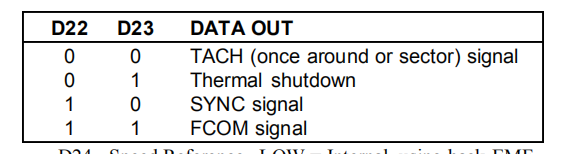
数据输出。数据输出终端是由串行端口的D22和D23控制的2位输入多路复用器的输出。可用数据包括转速信号(内部或外部生成)、同步信号、FCOM信号和热关机(低=A8904在热限值内运行,高=已发生热关机)。
速度循环初始化(YANK)。为确保从启动状态快速过渡到正常工作状态,通过内部YANK命令将滤波器端子拉至滤波器阈值电压VFILTERTH,并将初始输出电流设置为所选的最大电流限制。这种情况一直保持到电机达到正确的速度,并产生第一个错误快速信号,从而消除扬克和允许线性电流控制。
当使用外部速度控制方案(D24=1)时,YANK功能也被激活。为了确保通过内部速度控制在启动时释放扬克,必须确保速度参考设定为低于电机设计运行速度的速度。请注意,当串行端口被编程为最初运行时,速度的默认条件被设置为最慢的条件,因此这将保证YANK被释放。在使用外部速度控制时,重要的是,至少在串行端口中编程极数、速度控制模式和速度参考。
前进/后退。方向控制通过串行端口中的D25进行管理。
串行端口。控制特性和诊断数据选择通过29位串行端口传送到A8904。参见第6页的串行端口时序图。当芯片选择低时,数据被写入时钟正边缘的串行端口,并首先输入MSB(D28)。在写入周期结束时,芯片选择变高,串行端口被禁用,不能再传输数据。此外,写入串行端口的数据被锁定并激活。
如果发送小于29位的字,则未编程的未使用的最高有效位将重置为零。在现有A8902-A应用程序中使用A8904时不存在兼容性问题,因为五个msb重置为零,这是A8902-A操作的默认条件。在A8902-A应用中使用A8904时,唯一要考虑的是确保芯片选择的最短高时间至少为500 ns。
D0-睡眠/运行模式;低=睡眠,高=运行。此位允许设备在不使用时断电。
D1-步进模式;低=正常操作,高=仅步进。当处于仅步进模式时,反电动势换流电路被禁用,启动振荡器对电源输出进行换流。此模式用于设备和系统测试。
D2-制动;低=运行,高=制动。
D3、D4和D28-输出电流限制由D3&D4设置;D28设置跨导增益。
D5到D18-14位字,低电平有效。编程计数以产生相应的REF信号,该信号指示所需的电机转速。
D19-速度控制模式;低=内部,一次环绕速度信号,高=外部扇区数据。
D20和D21-编程一次循环FCOM计数器的电机极数。
D22和D23-控制多路复用器以输出数据。有关状态定义,请参见数据输出部分。
D24-速度参考。低=内部,使用反电动势技术,高=外部(内部控制禁用)。
D25-方向。低=前进,高=后退。
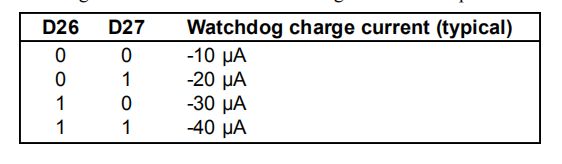
D26和D27-为看门狗电容器编程充电电流。此功能用于调整消隐时间和看门狗换向时间。
D28-编程跨导增益。低=500毫安/伏,高=250毫安/伏。
重置。当复位终端被拉低时,所有串行端口位被复位为低,并且部件在睡眠模式下工作。
欠压锁定,VDD。当发生欠压情况时,所有串行端口位重置为低,并且部件在睡眠模式下工作。
充油泵。电荷泵需要在负载电源上方提供一个电压轨,用于驱动高侧DMOS门。此外,电荷泵供电电容器CRES也在断电时为制动控制电路供电。CRES应为220 nF。
刹车。A8904的动态制动功能使三个电机绕组对地短路。这是通过关闭三个源驱动程序并打开三个接收器驱动程序来实现的。制动器的激活可以通过制动器输入或通过串行端口中的D2位来实现。
在制动过程中,电机有效地充当三个正弦波电压发生器,120°异相,其中每个绕组产生的电压与电机速度和常数成正比。通过任何接收器驱动器的电流只是产生的电压除以中心抽头到输出电阻再加上接收器驱动器电阻。当电机在制动过程中趋于减速时,产生的电压和相应的电流都会降低。
当选择要在制动应用的地方使用的电机时,重要的是确定应用的特性,以确保在制动应用时,汇极驱动器中的峰值电流不超过3A,从峰值电流到驱动器最大电流极限的时间不超过800 ms。另一个考虑因素是溶液的热量,在这种情况下,反复的旋转和制动循环可能导致结温过高。
制动电路的供电电压来自电荷泵供电电容器CRES。当CRES选择为220 nF时,断电后制动电路将工作至少100 ms。
在诸如磁盘驱动器的某些应用中,希望包括制动延迟,以允许诸如磁盘头的敏感电路在激活主轴电机制动器之前缩回。制动延迟可以简单地通过使用外部RC和二极管来控制制动端子来实现。
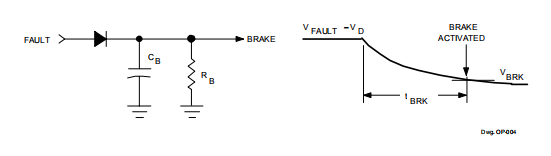
制动延迟可通过以下等式设定:

中心抽头。一旦制动器启动,三个水槽驱动器将保持激活状态,直到供电轨降至工作范围以下。建议在重新启动之前重置零件。建议将电机的中心抽头连接连接到中心抽头端子。如果电机的中心抽头未连接到中心抽头端子,则A8904通过连接在每个输出和中心抽头之间的一系列10 kΩ电阻器在内部模拟电机的中心抽头电压。这种技术不能提供理想的换相点。
外部组件选择。所有电容器的额定值应至少为25 V,电介质应为X7R,除了启动电容器CST(可以是Z5U电介质或等效介质)和输入电容器Cfilter(应该是大于100μF、35 V、Iripple>100毫安的电解类型)外。如果溶液的环境温度高于70°C,则C过滤器的额定温度应为105°C。
所有电阻至少为1/8 W,公差为±5%。在存在电磁干扰的噪声敏感系统中,或为了稳定某些电机的电流波形,可能需要在电机绕组上添加RC缓冲器,如下页的应用电路所示。如果选择了正确的看门狗电容器进行最佳消隐并实施了良好的布局实践,则A8904解决方案应相对不受开关电压尖峰等的影响。
在工作频率范围内,电流脉冲从负载电源中抽出,是电容电抗而不是ESR控制输入滤波器Cfilter的总阻抗。因此,可以通过简单地增加Cfilter的值来进一步减少传导电磁辐射。在极为敏感的系统中,可能需要引入与负载电源线串联的差模电感。
布局考虑。HTSSOP部分(A8904SLP)有三个独立的接地连接,模拟、数字和电源必须在外部连接在一起。应使用一个接地板为电源开关提供散热,并减少潜在的噪声拾取感应回路和辐射发射。地平面应覆盖A8904下方的区域,并超出轮廓,形成一个围绕所有外部组件的平面。HTSSOP部件的外露热垫应与地平面连接。
滤波器元件,特别是滤波器、定时和延迟电容器应尽可能靠近设备端子。为了减少杂散电感和防止潜在的数据损坏,到串行端口和振荡器的记录道也必须尽可能短和宽。此外,这些轨迹应远离任何噪声信号。
注:
1、网状引线框架。导线6、7、18和19在内部是一体的。
2、 引线间距公差是非累积的。
3、 在所示限制范围内,由供应商选择精确的车身和引线配置。
4、 以31个装置的标准棒/管提供,或在零件号上加上“TR”用于磁带和卷盘。
注:
1、在所示范围内,由供应商选择精确的主体和引线配置。
2、 引线间距公差是非累积的。
3、 以49个装置的标准棒/管提供,或在胶带和卷盘的零件号上加上“TR”。
