特点和优点
▪ 低RDS(开)输出
▪ 自动电流衰减模式检测/选择
▪ 混合和慢电流衰减模式
▪ 低功耗同步整流
▪ 内部UVLO和热关机电路
▪ 交叉电流保护
说明
A3983是一个完整的微步马达驱动器,内置翻译,操作简单。它被设计为在全阶、半阶、四阶和八阶模式下操作双极步进电机,输出驱动容量高达35 V和±2 A。A3983包括一个固定关闭时间的电流调节器,能够在慢衰减模式或混合衰减模式下操作。
翻译是A3983易于实现的关键。只需在步进输入端输入一个脉冲就可以驱动马达一个微步。没有相序表、高频控制线或复杂的编程接口。A3983接口非常适合复杂微处理器不可用或负担过重的应用。
A3983中的斩波控制自动选择电流衰减模式(慢速或混合)。当在步进输入引脚处出现信号时,A3983确定该步进是否在每个电机相位中产生更高或更低的电流。如果更改为更高的电流,则衰减模式设置为慢速衰减。如果变化为较低电流,则电流衰减设置为混合(最初设置为快速衰减,持续时间等于固定关闭时间的31.25%,然后在剩余关闭时间内设置为慢速衰减)。电流衰减控制方案降低了电机的可听噪声,提高了步进精度,降低了功耗。
提供内部同步整流控制电路,以改善在脉宽调制操作期间的功耗。内部电路保护包括:滞后热关机、欠压锁定(UVLO)和交叉电流保护。不需要特殊的通电顺序。
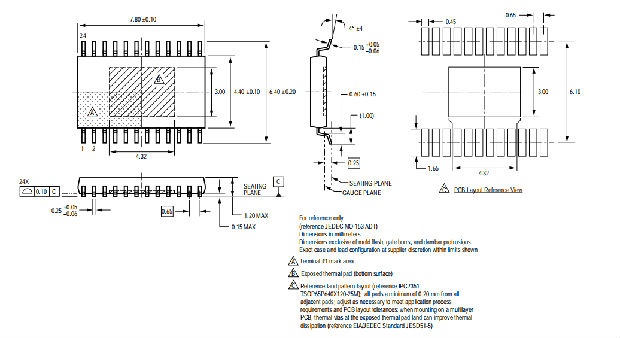
A3983以低剖面(最大高度1.2 mm)提供,24针TSSOP,带外露热垫(后缀LP)。不含铅,100%哑光镀锡引线框架。
选择指南

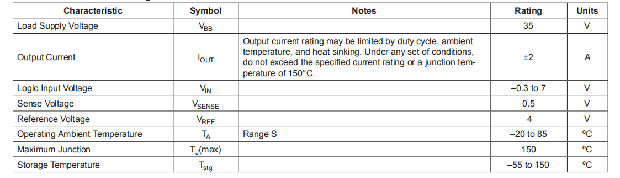
绝对最大额定值
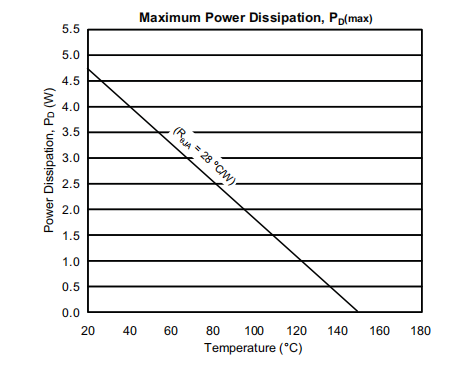
热特性

*在静止的空气中。Allegro网站上提供的其他热量信息。
功能描述
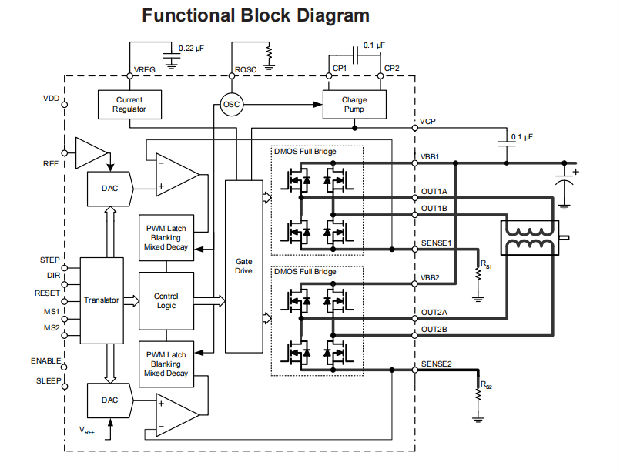
设备操作。A3983是一个完整的微步马达驱动器,带有一个内置的转换器,操作简单,控制线最少。它被设计成在全阶、半阶、四阶和十六阶模式下操作双极步进电机。两个输出全桥和所有N通道DMOS场效应晶体管中的电流通过固定的关断时间PMW(pulse width modulated)控制电路进行调节。在每个步骤中,每个全桥的电流由其外部电流检测电阻器(RS1或RS2)、参考电压(VREF)和其DAC的输出电压(依次由转换器的输出控制)的值设置。
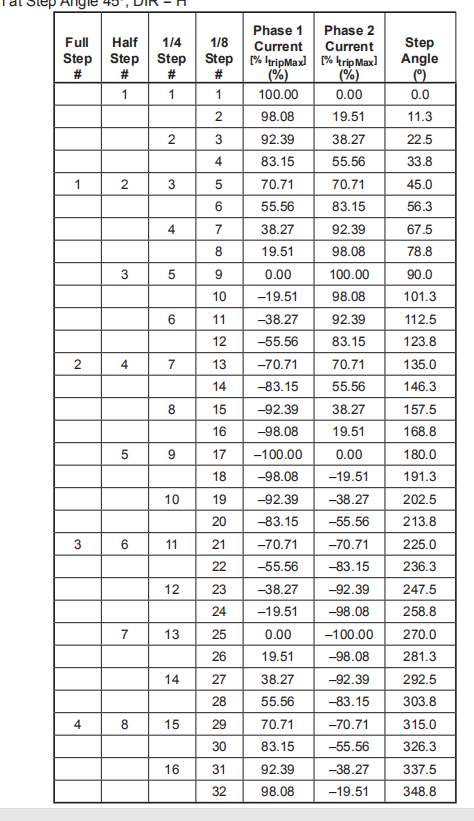
在通电或复位时,转换器将DAC和相电流极性设置为初始初始状态(如图2至图5所示),并将电流调节器设置为两个相的混合衰减模式。当阶跃输入上出现阶跃指令信号时,转换器自动将DAC排序到下一级和当前极性。(当前电平序列见表2)微步分辨率由输入MS1和MS2的组合效应设置,如表1所示。
步进时,如果DAC的新输出电平低于其以前的输出电平,则活动全桥的衰减模式设置为混合。如果dac的新输出电平高于或等于其先前的电平,则活动全桥的衰减模式设置为慢速。这种自动电流衰减选择通过减少由电机反电动势引起的电流波形失真来改善微步进性能。
复位输入(复位)。重置输入将转换器设置为预定义的初始状态(如图2至图5所示),并关闭所有DMOS输出。所有阶跃输入将被忽略,直到重置输入设置为高。
步骤输入(步骤)。步进输入上的一个从低到高的转换使翻译器按顺序排列,并使马达前进一个增量。转换器控制DAC的输入和每个绕组中的电流流向。增量的大小由输入MS1和MS2的组合状态决定。
微步选择(MS1和MS2)。选择微步格式,如表1所示。MS2具有100 kΩ下拉电阻。对这些输入所做的任何更改在下一步上升边缘之前都不会生效。
方向输入(DIR)。这决定了马达的旋转方向。低时,方向为顺时针,高时,方向为逆时针。对该输入的更改在下一步上升边缘之前不会生效。
内部脉宽调制电流控制。每个全桥都由一个固定的断开时间的PWM电流控制电路控制,该电路将负载电流限制在理想值ITRIP。最初,启用一对对角的源和汇DMO输出,电流流过电机绕组和电流检测电阻器RS。当跨过R的电压与DAC输出电压相等时,电流检测比较器重置PWM锁存器。然后,闩锁关闭源DMOS fet(在慢衰减模式下)或接收器和源DMOS fet(在混合衰减模式下)。
电流限制的最大值是通过选择RS和VREF引脚的电压来设置的。跨导函数由电流限制的最大值itrimax(A)近似,该值由:
其中RS是感测电阻器的电阻(Ω),V REF是REF引脚(V)上的输入电压。
DAC输出以精确的步骤将VREF输出减少到电流感应比较器,使得:

(每个步骤的%itrimpax见表2。)不超过SENSE1和SENSE2引脚的最大额定值(0.5 V)至关重要。
固定的休息时间。内部的脉冲宽度调制电流控制电路使用一个一次性电路来控制DMOS FET保持关闭的持续时间。一次性关闭时间tOFF由从ROSC正时引脚连接到接地的外部电阻器的选择决定。如果ROSC管脚连接到大于3v的外部电压,则tOFF默认为30μs。为此,ROSC管脚可以安全地连接到VDD管脚。tOFF(μs)的值约为:
空白。当内部电流控制电路切换输出时,此功能将使电流感应比较器的输出为空白。比较器输出被屏蔽,以防止由于钳位二极管的反向恢复电流和与负载电容相关的开关瞬态而导致的假过电流检测。空白时间tBLANK(μs)约为:
充油泵(CP1和CP2)。电荷泵用于产生大于VBB的栅极电源,用于驱动源端DMOS栅极。CP1和CP2之间应连接一个0.1μF陶瓷电容器。此外,VCP和VBB之间需要一个0.1μF的陶瓷电容器,作为高边DMOS门的储能器。
VREG(VREG)。该内部产生的电压用于操作接收器侧DMOS输出。VREG管脚必须与0.22μF陶瓷电容器分离接地。VREG由内部监控。在故障情况下,A3983的DMOS输出被禁用。
启用输入(启用)。此输入打开或关闭所有DMOS输出。当设置为逻辑高时,输出被禁用。当设置为逻辑低时,内部控制根据需要启用输出。转换器输入STEP、DIR、MS1和MS2以及内部排序逻辑都保持活动状态,与启用输入状态无关。
关闭。如果发生故障,温度过高(TJ过量)或欠压(在VCP上),A3983的DMOS输出被禁用,直到故障条件消除。通电时,UVLO(欠压锁定)电路禁用DMOS输出,并将转换器重置为初始状态。
睡眠模式(睡眠)。 为了在电机不使用时将功耗降到最低,该输入会禁用许多内部电路,包括输出DMOS FET、电流调节器和电荷泵。睡眠引脚上的逻辑低使A3983进入睡眠模式。逻辑高允许正常运行和启动(此时A3983驱动电机至初始微步位置)。当从睡眠模式出现时,为了使电荷泵稳定,在发出阶跃指令之前提供1毫秒的延迟。
混合衰变操作。这座桥可以在混合衰减模式,取决于步骤顺序,如图3至图5所示。当到达触发点时,A3983最初进入快速衰减模式,关闭时间为31.25%。托夫。在那之后,它切换到慢衰减模式为剩余的飞行时间。
同步整流。当一个脉冲宽度调制关闭周期由内部固定-关闭时间循环触发,负载电流根据控制逻辑选择的衰减模式循环。此同步整流功能在电流衰减期间打开适当的FET,并有效地使低DMOS RD(开)的体二极管短路。这大大降低了功耗,并且可以在许多应用中消除对外部肖特基二极管的需要。当检测到零电流水平时,关闭同步整流可防止负载电流反转。
应用程序布局
布局. 印刷电路板应使用重型接地平面。为了获得最佳的电气和热性能,A3983必须直接焊接到电路板上。A3983封装的底部是一个外露的衬垫,为增强散热提供了途径。热垫应直接焊接到PCB的外露表面上。热过孔用于将热量传递到PCB的其他层。
为了最小化地弹和偏移问题的影响,重要的是要有一个低阻抗的单点接地,称为星接地,位于非常靠近设备。通过将焊盘与A3983正下方的接地平面连接,该区域成为星形接地点的理想位置。低阻抗接地将防止在高电流运行期间接地反弹,并确保输入端子处的电源电压保持稳定。星型接地可以使用设备下面暴露的热垫创建,作为低阻抗接地点和热路径。
两个输入电容器应并联放置,并尽可能靠近设备电源引脚。陶瓷电容器(CIN1)应该比大容量电容器(CIN2)更靠近管脚。这是必要的,因为陶瓷电容器将负责输送高频电流元件。感测电阻器RSx的接地阻抗应非常低,因为它们必须携带大电流,同时支持通过电流感测比较器进行非常精确的电压测量。长的接地轨迹将导致额外的电压降,对比较器精确测量绕组电流的能力产生不利影响。SENSEx管脚与RSx电阻之间的距离非常短,与器件下方的星形接地之间的距离非常大,阻抗很低。如果可能,检测电路上不应存在其他部件。
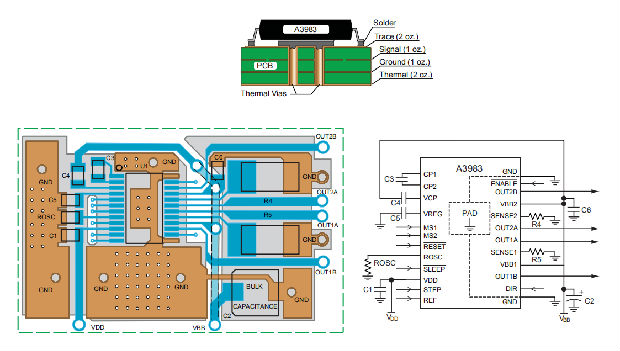
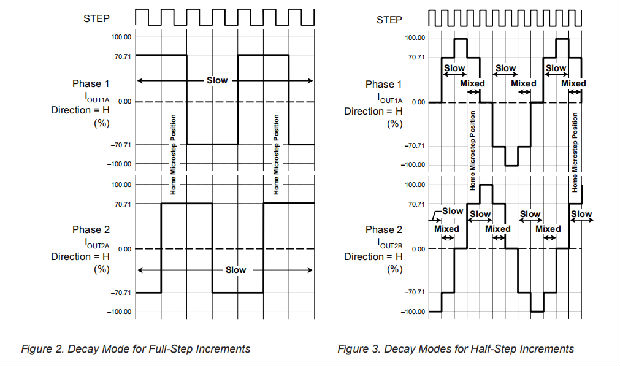
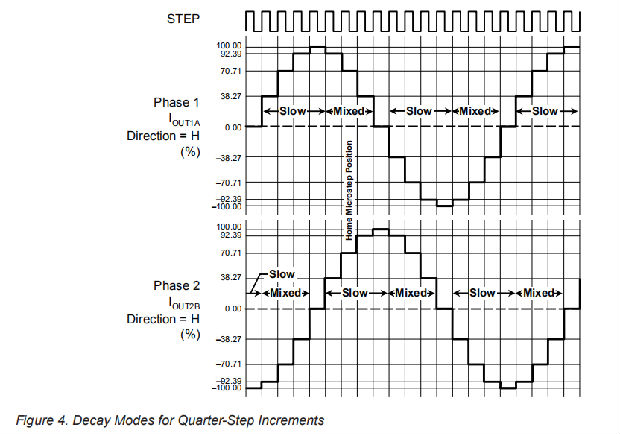
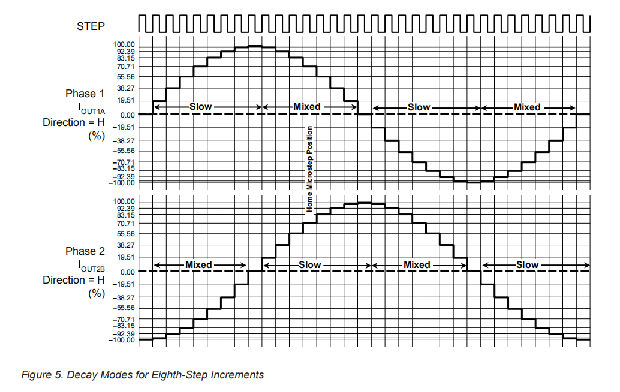
表2。步进顺序设置在步进角45°处的起始微步位置;DIR=H
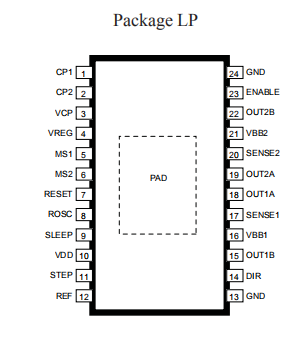
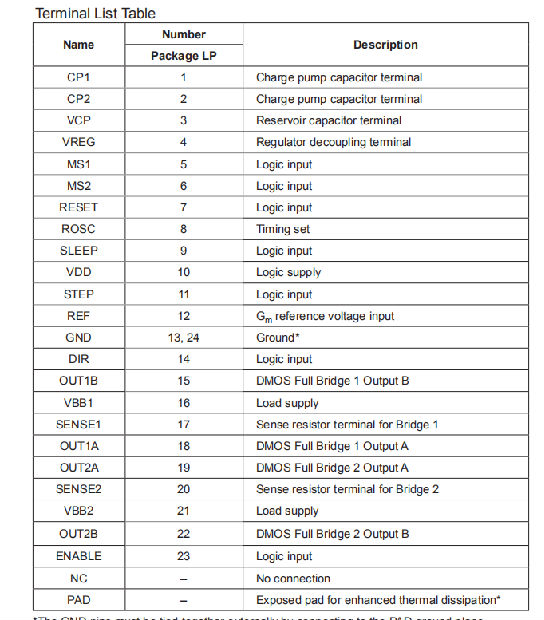
*接地引脚必须通过连接到设备下方的焊盘接地平面外部连接在一起。
低压包,24针TSSOP,带外露热垫