3948点击型号即可查看芯片规格书
特征
±1.5 A,50 V连续输出额定值;低rDS(开)输出;可编程混合、快速和慢速电流衰减模式;串行接口控制芯片功能;低功耗同步整流;内部UVLO和热关机电路;交叉电流保护。
用于直流脉冲宽度调制(PWM)电流控制的设计电机,A3948SB和A3948SLB能够连续输出电流为±1.5 A,工作电压为50 V。内部固定关闭时间脉冲宽度调制电流控制定时电路可通过串行接口,可在缓慢、快速和混合电流衰减下运行模式。输出额定值为±2A的类似装置可用作A3958SB/SLB。
提供相位和使能输入端子,用于用外部控制直流电动机的速度和方向应用的脉宽调制控制信号。启用输入可以是通过串行端口编程以快速或慢速对电桥进行脉宽调制电流衰减。内部同步整流控制电路提供以减少在PWM操作期间的功耗。
内部电路保护包括热关机滞后和交叉电流保护。特殊通电不需要排序。
A3948SB/SLB有两种电源可供选择包装,24针塑料蘸有铜棒片(包装后缀“B”)和一个24导塑料SOIC,带有一个铜棒片(包后缀“LB”)。在这两种情况下,电源标签都在地上无需电隔离。
始终按完整的零件号订购:

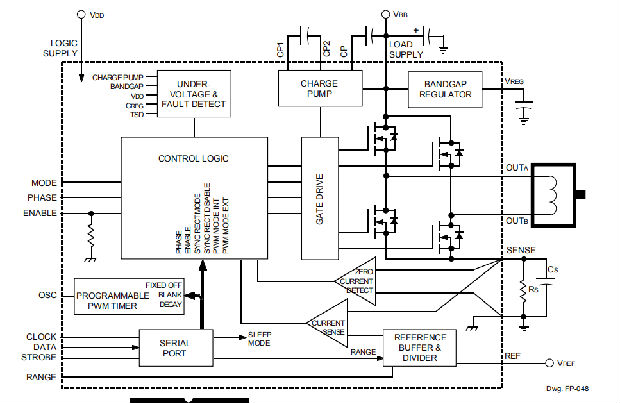
功能框图
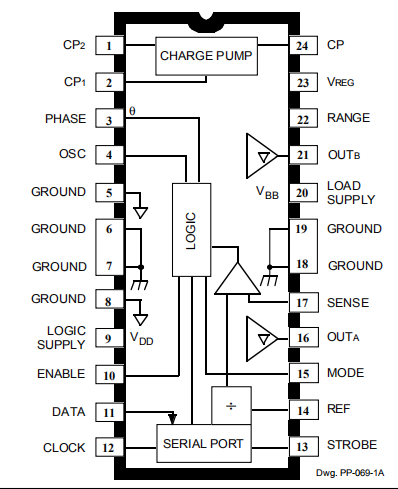
A3948SB(浸渍)
注意A3948SLB(SOIC)和A3948SB(DIP)不共享公共终端任务。
功能描述
串行接口。A3948通过3线(时钟、数据、频闪)串行端口控制。可编程功能允许根据电机驱动要求最大限度地灵活配置脉宽调制。串行数据从D19开始计时。
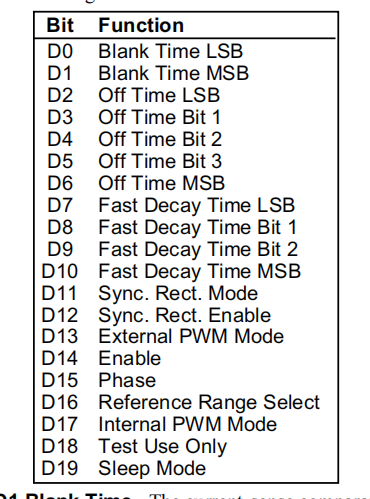
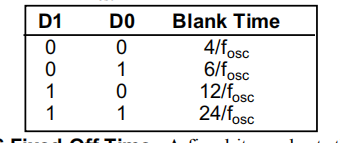
D0–D1空白时间。根据下表,当任何输出驱动器打开时,电流感应比较器被屏蔽。fosc是振荡器的输入频率。
D2–D6固定关闭时间。一个五位字设置内部PWM电流控制的固定关闭时间。关闭时间由定义:

式中N=0…31
例如,在振荡器频率为4mhz的情况下,关断时间可以从1.75μs调整到63.75μs,增量为2μs。
D7–D10快速衰减时间。一个四位字设置内部PWM控制电路的固定关闭时间的快速衰减部分。只有当选择了混合衰减模式(通过位D17和模式输入端子)时,这才有影响。对于tfd>toff,器件将在快衰减模式下有效工作。快速衰减部分定义为:

式中N=0…15
例如,在振荡器频率为4mhz的情况下,快速衰减时间将可从1.75μs调整到31.75μs,增量为2μs。
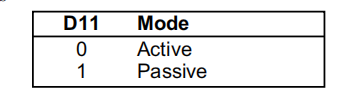
D11同步整流模式。激活模式通过在检测到零电流水平时关闭同步整流来防止负载电流反转。被动模式允许电流反向,但如果负载电流反向上升到VREF/RS设置的电流限制,则将关闭同步整流电路。
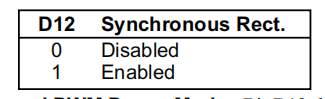
D12同步整流启用。
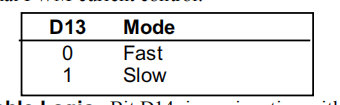
D13外部脉冲宽度调制衰减模式。位D13在使用外部PWM电流控制的启用斩波时确定电流衰减模式。
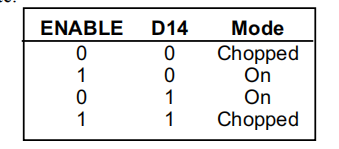
D14启用逻辑。位D14,与ENABLE,确定输出驱动程序是否处于斩波(关)(ENABLE=D14)或开启(ENABLE≠D14)状态。
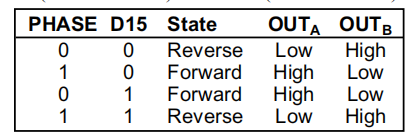
D15相位逻辑。位D15与PHASE结合,确定设备是在正向(PHASE≠D15)还是反向(PHASE=D15)状态下工作。
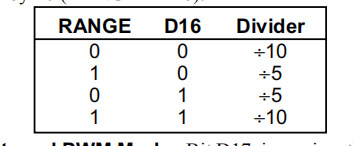
D16 Gm范围选择。位D16与RANGE一起确定VREF是除以5(RANGE≠D16)还是除以10(RANGE=D16)。
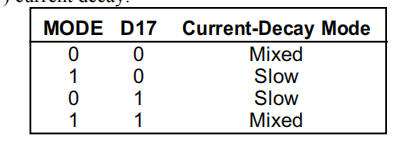
D17内部脉宽调制模式。位D17结合模式,选择慢(模式≠D17)或混合(模式=D17)电流衰减。
D18测试模式。位D18低(默认)在正常模式下操作设备。D18仅用于测试目的。用户不应更改此位。
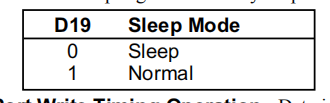
D19睡眠模式。位D19选择睡眠模式以在不使用时最小化功耗。这会使包括调节器和电荷泵在内的大部分内部电路失效。通电时,串行端口初始化为所有0。在尝试启用任何输出驱动程序之前,应将D19位编程为高电平1 ms。
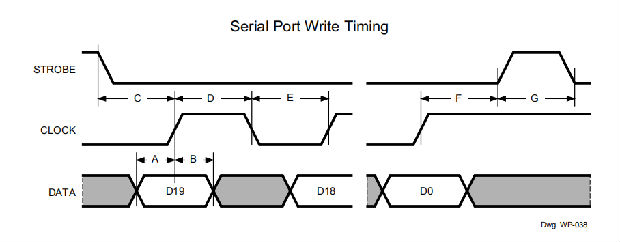
串行端口写入定时操作。数据已计时进入时钟上升沿的移位寄存器信号。正常情况下,频闪将保持在高位,仅启动写循环的下限。参考图表以下和这些最小定时的规范要求。
A、 数据设置时间......15纳秒
B、 数据保持时间......10纳秒
C、 设置闪光灯到时钟上升沿......50纳秒
D、 时钟高脉冲宽度......50纳秒
E、 时钟低脉冲宽度......50纳秒
F、 将时钟上升沿设置为选通......50纳秒
G、 选通脉冲宽度......50纳秒
VREG。该内部产生的电压用于操作接收器侧DMOS输出。VREG端子应与0.22μF电容器分离接地。VREG由内部监控,在出现故障情况时,设备输出被禁用。
充油泵。电荷泵用于产生大于VBB的栅极电源电压来驱动源端DMOS栅极。CP1和CP2之间应连接一个0.22μF的陶瓷电容器,用于泵送目的。0.22μF陶瓷电容器应连接在CP和VBB作为储液罐来操作高端DMOS设备。CP电压由内部监控,在故障情况下,设备的源输出被禁用。
关闭。如果发生故障(结温过高,或CP或VREG上电压过低),设备的输出将被禁用,直到故障条件消除。通电时,或在低VDD的情况下,UVLO电路禁用驱动器并将串行端口中的数据重置为所有零。在没有OSC信号的情况下,看门狗电路也会重置数据。
脉冲宽度调制定时器功能。脉冲宽度调制定时器通过串行端口(位D2–D10)可编程,以向控制电路提供关断时间脉冲宽度调制信号。在混合电流衰减模式中,关闭时间的第一部分在快速衰减中工作,直到达到快速衰减时间计数(串行位D7–D10),然后在关闭时间段的其余部分(位D2–D6)缓慢衰减。如果快速衰减时间设置得比关闭时间长,则该设备有效地在快速衰减模式下工作。结合模式,位D17选择混合衰减或慢衰减。
脉冲宽度调制空白定时器。当源驱动器打开时,由于钳位二极管的反向恢复电流和/或与负载中的分布电容有关的开关瞬态而发生电流尖峰。为了防止该电流尖峰错误地复位源使能锁存器,感测比较器被屏蔽。空白计时器在关闭时间计数器(见位D2–D6)之后运行,以提供可编程的空白功能。当ENABLE被切断或相位改变时,空白定时器被重置。对于外部PWM控制,相位变化或启用会触发消隐功能。
同步整流。当通过ENABLE chop命令或内部固定关闭时间周期触发一个PWM关闭周期时,负载电流将根据控制逻辑选择的衰减模式再循环。A3948同步整流功能将在电流衰减期间打开相反的一对DMO输出,并使用低rDS(开)驱动器有效地短路体二极管。这将大大降低功耗,并可以消除外部肖特基二极管的需要。
同步整流可配置为主动模式、被动模式或通过串行端口禁用(位D11和D12)。
在慢衰减模式下,主动或被动模式选择没有影响。启用同步校正后,慢衰减模式用作有效的制动模式。
现行法规。负载电流由内部固定关闭时间的PWM控制电路调节。当DMOS H桥的输出接通时,电机绕组中的电流增加,直到达到由外部感测电阻器(RS)、施加的模拟参考电压(VREF)、范围逻辑电平和串行数据位D16确定的跳闸值:
当范围=D16。。。。。。。。。。。ITRIP=VREF/10RS
当范围≠D16。。。。。。。。。。。。ITRIP=VREF/5RS
在触发点,检测比较器重置sourceenable锁存器,关闭源驱动程序。然后,负载电感使电流在串行端口编程的固定关闭时间段内循环。再循环期间的电流路径由慢/混合电流衰减模式(D17)和同步整流控制位(D11和D12)的配置确定。
注意,感应电压(VS)不得大于0.55 V(绝对最大额定值)。因此,如果参考分压器设置为5,则VREF不得大于2.75 V;如果参考分压器设置为10,则VREF不得大于5.5 V(绝对最大额定值)。
电流感应。为了最大限度地减小由接地跟踪红外下降引起的对ITRIP电流水平的不精确感测,感测电阻器应具有到设备接地端子的独立接地回路。对于低值感测电阻器,PCB感测电阻器的迹线中的红外压降可能很大,应予以考虑。应避免使用插座,因为插座的接触电阻会导致RS的变化。
RS的最大值为RS≤0.5/ITRIP。
刹车。制动功能通过串行端口位D13以慢衰减模式驱动装置,通过位D12启用同步整流,并通过D14和启用输入端子的组合进行斩波来实现。由于可以通过DMOS驱动器在任何方向驱动电流,只要断言启用斩波模式,这种配置就可以有效地使电机产生的BEMF短路。需要注意的是,内部的PWM电流控制电路在制动时不会限制电流,因为电流不会流过感测电阻器。最大制动电流可用VBEMF/RL近似。应注意确保在高速和高惯性负载的最坏制动情况下不会超过设备的最大额定值。
热保护。通常,当结温达到165°C时,电路会关闭所有驱动器。其目的仅在于保护装置不受过度连接温度导致的故障影响,不应意味着允许输出短路。热停堆具有大约15°C的滞后。
布局。印刷线路板应使用重型接地板。为了获得最佳的电气和热性能*,驱动器应直接焊接到电路板上。RS的接地侧应具有通向设备接地端子的单独路径。此路径在物理上应尽可能短,并且不应连接任何其他组件。建议在传感器和接地之间放置一个0.1μF的电容器,尽可能靠近设备;负载电源端子VBB应与放置在尽可能靠近设备的电解电容器(建议大于47μF)分离。
*第1页中规定的热阻和绝对最大允许的封装功耗是在典型的双面印刷电路板上以最小的铜接地面积测量的。另见应用注释29501.5,提高蝙蝠翼的功耗。
终端列表
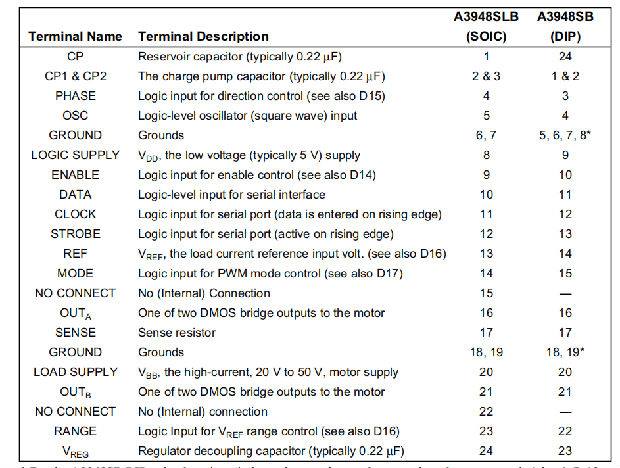
*仅对于A3948SB DIP,基板接地(插脚6、7、18和19)和插脚5和8处的接地之间存在不确定电阻。插脚5和8以及6、7、18或19必须在外部连接在一起。
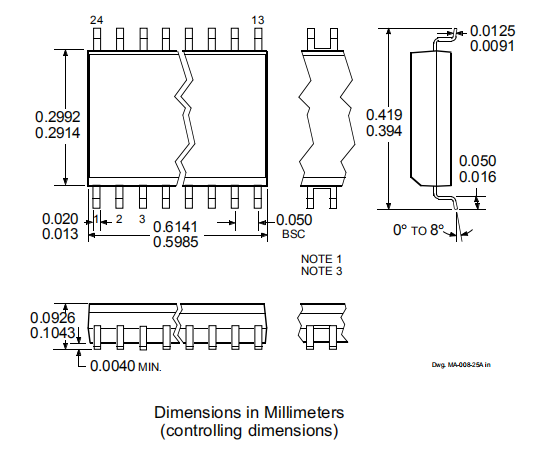
A3948SB型尺寸单位:英寸(控制尺寸)
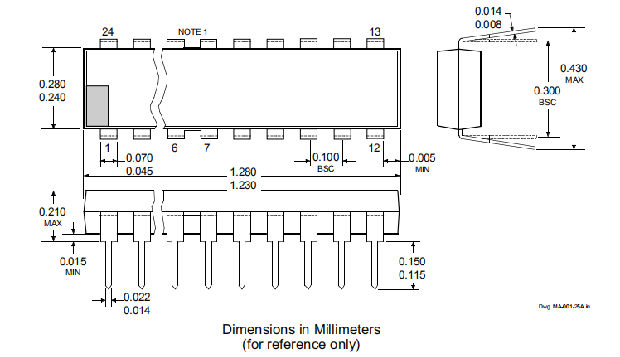
注:1、网状引线框架。导线6、7、18和19在内部是一体的。
2、在所示限制范围内,由供应商选择精确的车身和引线配置。
3、引线间距公差是非累积的。
4、铅的厚度在座面或座面以下测量。
5、以15个装置的标准棒/管提供。
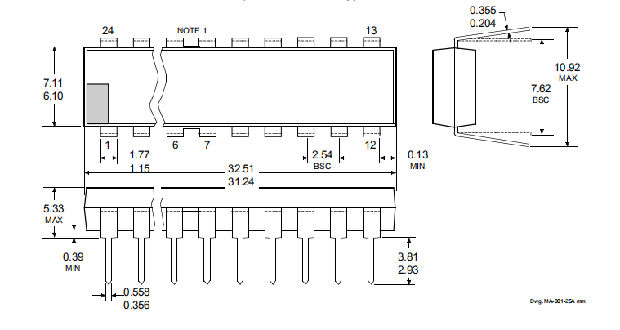
A3948SLB型尺寸单位:英寸(仅供参考)
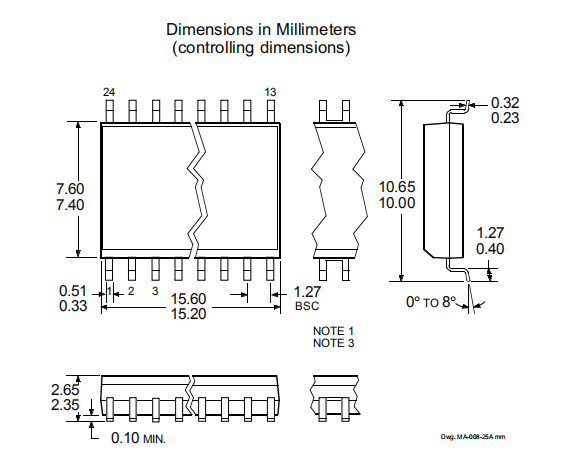
注:1、在所示限制范围内,由供应商选择精确的车身和引线配置。
2、引线间距公差是非累积的。
3、网状引线框架。导线6、7、18和19在内部是一体的。
4、以31个装置的标准棒/管提供,或在胶带和卷盘的零件号上加上“TR”。此处描述的产品是根据一项或多项美国专利或正在申请的美国专利制造的。
Allegro MicroSystems,Inc.保留随时为改进其产品的性能、可靠性或可制造性而偏离详细规范的权利。在下订单之前,提醒用户确认所依赖的信息是最新的。
