ADN8831点击型号即可查看芯片规格书
特征
两个集成零漂、轨对轨、斩波放大器;TEC电压电流运行监测;可编程TEC最大电压和电流可编程TEC电流加热和冷却极限;可配置的开关频率高达1兆赫功率效率:>90%;温度锁定指示;可选的内部或外部时钟源;多点操作的时钟相位调整;支持负温度系数(NTC)热敏电阻或正温度系数(PTC)电阻热探测器(RTD);5 V典型和可选3 V电源;待机和关机模式可用性;可调软启动功能;5 mm×5 mm 32引线LFCSP。
应用
热电冷却器温度控制;DWDM光收发模块;光纤放大器;光网络系统;需要TEC温度控制的仪表。
一般说明
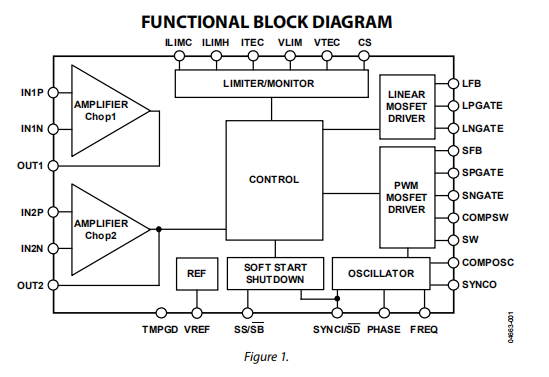
ADN8831是一个单片TEC控制器。它有两个集成,零漂移,轨对轨比较器和一个脉宽调制驱动器。独特的PWM驱动器与模拟驱动器一起工作,控制H桥中的外部选择mosfet。通过感应来自TEC的热探测器反馈,ADN8831可以驱动TEC来确定连接到TEC模块的激光二极管或无源元件的可编程温度。
ADN8831支持NTC热敏电阻或正温度系数(PTC)RTD。目标温度被设置为来自DAC或由参考电压源驱动的外部电阻分压器的模拟电压输入。
比例积分微分(PID)补偿网络有助于快速准确地稳定ADN8831热控制回路。An-695应用说明ADN8831 T中描述了一个可调PID补偿网络示例。ADN8831提供2.5 V的典型参考电压,用于热敏电阻温度传感或用于在冷却和加热模式下测量和限制TEC电压/电流。
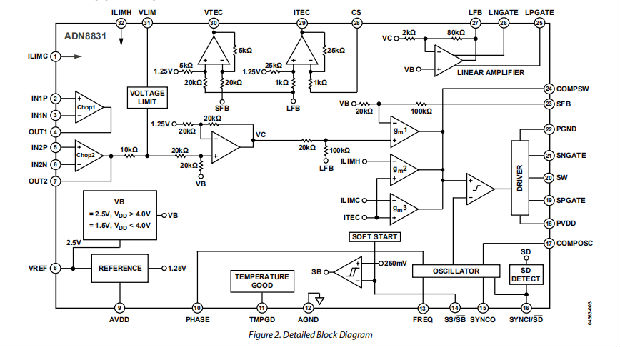
详细框图
绝对最大额定值
除非另有说明,否则在25°C下的绝对最大额定值。
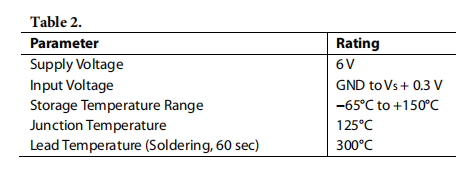
高于绝对最大额定值的应力可能会对设备造成永久性损坏。这仅是一个应力额定值;设备在本规范操作章节所述条件或以上任何其他条件下的功能操作并不意味着。长期暴露在绝对最大额定条件下可能会影响设备的可靠性。
热特性
θ是在最坏情况下指定的,即,表面贴装封装的电路板中焊接的器件。

典型性能特征
操作理论
ADN8831是一款单芯片TEC控制器,用于设置和稳定TEC温度。应用于ADN8831输入端的电压对应于目标TEC温度设定点(温度设置)。通过控制一个外部FET H桥,适当的电流被应用到TEC上,将热量泵送到或远离附着在TEC上的物体。目标温度由连接到TEC的热传感器测量,感测到的温度(电压)反馈到ADN8831,以完成TEC的闭合热控制回路。为了获得最佳的稳定性,热传感器必须靠近物体。在大多数激光二极管模块中,TEC和NTC热敏电阻已经安装在同一个封装中,用于调节激光二极管的温度。
ADN8831集成了两个自校正、自动调零放大器(Chop1和Chop2)。Chop1放大器通常采用热传感器输入,并将输入转换或调节为线性电压输出。输出1(引脚4)电压与目标温度成正比。输出1(引脚4)电压馈入补偿放大器(Chop2)并与温度设定值电压进行比较,从而产生与差值成比例的误差电压。使用Chop2放大器时,建议使用PID网络,如图12所示。
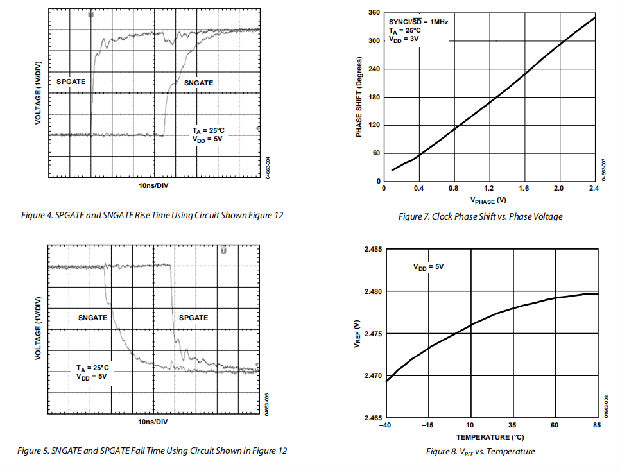
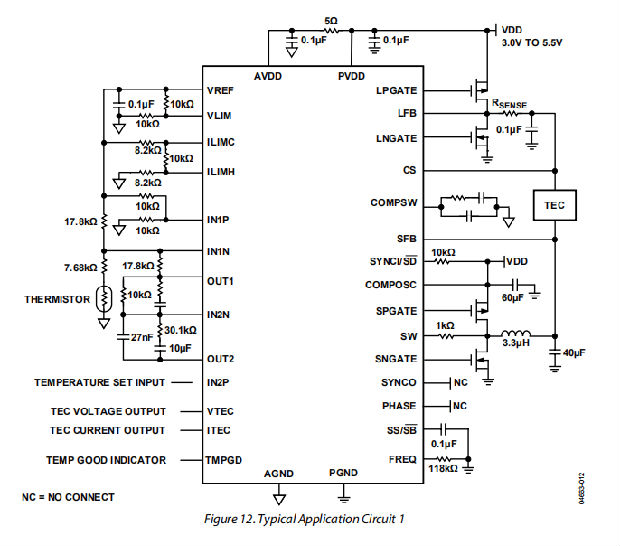
调整PID网络可优化TEC控制回路的阶跃响应。完成此操作后,可获得折衷的稳定时间和最大电流振铃。有关如何调整补偿网络的详细信息,请参阅PID补偿放大器(CHOP2)部分。TEC采用H桥结构差动驱动。ADN8831驱动外部MOSFET晶体管提供TEC电流。为了进一步提高系统的功率效率,H桥的一侧采用了PWM驱动器。只需要一个电感和一个电容器就可以滤除开关频率。H桥的另一边使用线性输出,不需要任何额外的电路。此专有配置允许ADN8831提供大于90%的效率。对于大多数应用,4.7μH电感、22μF电容和1 MHz的开关频率在TEC上保持低于0.5%的最坏输出电压纹波。
要使用VLIM(引脚31)和ILIMC(引脚1)/ILIMH(引脚32)设置流过TEC的最大电压和电流。更多细节见最大TEC电压限制部分和最大TEC电流限制部分。
振荡器时钟频率
ADN8831具有内部振荡器以产生输出级的开关频率。该振荡器可以设置为自由运行模式或与外部时钟信号同步。
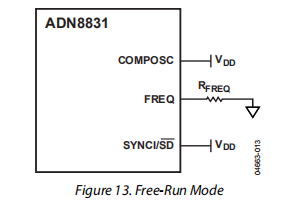
自由运行
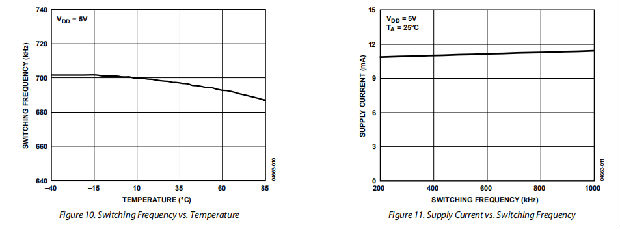
开关频率由一个从FREQ(引脚13)接地的电阻器设置。表5显示了一些常见开关频率的R。对于自由运行操作,请连接频率同步I/SD(插脚16)和组件(插脚17)至PVDD(插脚18)。
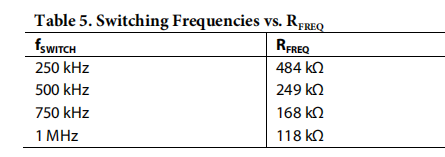
较高的开关频率降低了整个TEC的电压纹波。然而,由于晶体管栅极电容的更频繁的充放电,高开关频率在外部晶体管中产生更多的功耗。
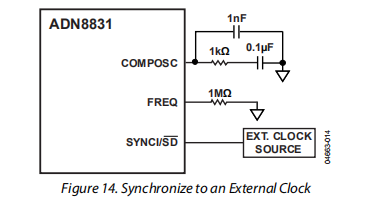
外部时钟操作
ADN8831的开关频率可以与外部时钟同步。将时钟信号连接到SYNCI/SD(引脚16),并将COMOSC(引脚17)连接到R-C网络。该网络补偿PLL以锁定外部时钟。
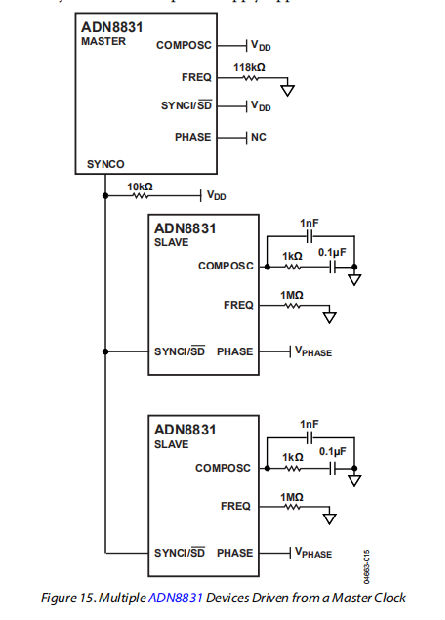
连接多个ADN8831设备
将SYNCO(引脚15)连接到另一个ADN8831的SYNCI/SD引脚,允许多个ADN8831设备使用单个时钟协同工作。可以从单个主ADN8831设备驱动多个ADN8831设备,方法是将主设备的SYNCO pin连接到每个从SYNCI/SD pin,或通过将每个设备的SYNCO pin连接到下一个设备的SYNCI/SD pin进行菊花链。当多个ADN8831设备以相同频率计时时,将调整相位以减少电源纹波。
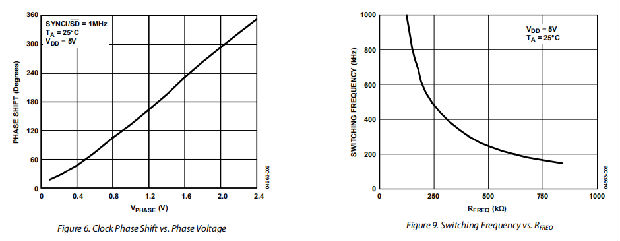
振荡器时钟相位
在相位(引脚10)处使用一个简单的电阻分频器调整振荡器时钟相位。相位调整允许两个或多个ADN8831设备在相同的时钟频率下工作,而不是同时切换所有输出。这样可以避免电源纹波过大的可能性。
为确保振荡器的正确工作,V应保持在100 mV至2.4 V的范围内。相位(引脚10)内部偏置为1.2 V。如果相位(引脚10)保持打开,则时钟相位设置为默认值180°。相位
温度锁定指示器
当OUT1(引脚4)电压达到IN2P(引脚5)温度设定点(温度设置)电压时,TMPGD(引脚11)输出逻辑高。TMPGD的检测范围为±25 mV,典型滞后为10 mV。这允许直接连接到微控制器或监控电路。
开机软启动
ADN8831可以编程为在指定的打开电源后的时间或SD管脚被拔出后的时间。这一特性被称为软启动,有助于逐渐增加PWM放大器的占空比。软启动时间由一个从SS(引脚14)接地的电容器设置。电容器值按以下公式计算:τ=150×式中:
式中:CSS是电容器的微法拉值;τSS是软启动时间,单位为毫秒;要将软启动时间设置为15 ms,CSS等于0.1μF。
关机模式
关机模式将ADN8831设置为超低电流状态。关机模式下的电流消耗通常为8微安。关机输入SD(引脚16)处于低激活状态。关闭设备,驱动SD到逻辑低。一旦应用逻辑高电平,ADN8331在软启动电路设置的时间延迟后被重新激活。有关更多详细信息,请参阅开机软启动部分。
待机模式
ADN8831有一个待机模式,可以关闭一个MOSFET驱动级。在待机模式下,ADN8831的电流消耗小于2毫安。备用输入SS/SB(引脚14)处于低激活状态。应用逻辑高后,ADN8331在延迟后重新激活。在待机模式下,只有SYNCO(引脚15)有时钟输出。所有其他功能块都已关闭。
TEC电压/电流监测器
TEC实时电压和电流分别在VTEC(Pin 30)和ITEC(Pin 29)处检测。
电压监测器
VTEC(引脚30)是一个模拟电压输出引脚,其电压与整个TEC的实际电压成比例。中心电压为1.25 V对应于穿过TEC的0 V。输出电压使用以下公式计算:

电流监测器
ITEC(引脚29)是一个模拟电压输出引脚,其电压与通过TEC的实际电流成比例。中心ITEC电压为1.25 V对应于通过TEC的0 A。
输出电压使用以下公式计算:

等效TEC电流的计算公式如下:
最大TEC电压限制
通过在VLIM(引脚31)处施加电压来设置最大TEC电压,以保护TEC。该电压可通过电阻分压器或DAC设置。电压限制器在双向TEC电压、冷却和加热电压下工作。
使用DAC
当电压源直接驱动VLIM(引脚31)时,冷却和加热电压限制设置在相同的水平。最大TEC电压使用以下公式计算:
其中:VTEC(MAX)为最大TEC电压;VVLIM是施加在VLIM(引脚31)上的电压。
使用电阻分压器
使用电阻分压器设置单独的电压限制。当ADN8831沿加热方向驱动TEC时,连接到VLIM(引脚31)的内部电流接收器电路吸取电流,从而降低VLIM(引脚31)处的电压。当TEC沿冷却方向驱动时,电流汇不激活;因此,TEC加热电压限制始终低于冷却电压限制。
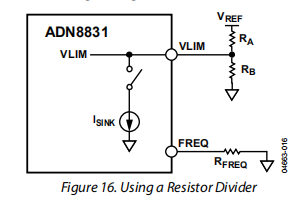
接收器电流由从频率(引脚13)连接到接地的电阻器设置。使用以下公式计算汇电流:
其中:ISINC是VLIM(引脚31)处的汇电流。RFREQ是连接在FREQ(引脚13)上的电阻器。
冷却和加热极限使用以下方程式:
最大TEC电流限制
为了保护TEC,通过在ILIMC(引脚1)和ILIMH(引脚32)上施加电压,在冷却和加热方向设置单独的最大TEC电流限制。最大TEC电流的计算公式如下:
应用程序信息
信号流
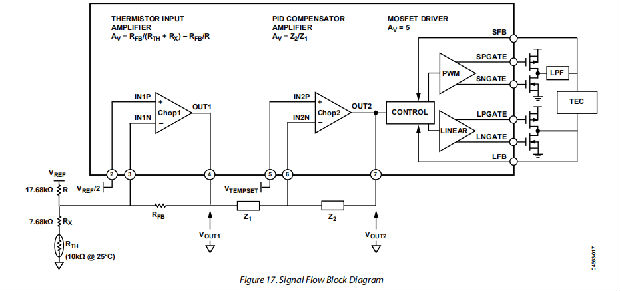
ADN8831集成了两个自动调零放大器,即Chop1放大器和Chop2放大器。这两个放大器都可以用作独立的放大器,因此,温度控制的实现可以有所不同。图17显示了通过ADN8831的信号流,以及使用Chop1放大器和Chop2放大器的温度控制回路的典型实现。
在图17中,Chop1放大器和Chop2放大器分别被配置为热敏电阻输入放大器和PID补偿放大器。热敏电阻输入放大器获得热敏电阻电压,然后输出到PID补偿放大器。然后,PID补偿放大器在频域上补偿环路响应。
输出2处补偿回路的输出被馈送至线性MOSFET栅极驱动器。LFB处的电压通过OUT2输入到PWM MOSFET栅极驱动器中。包括外部晶体管,差分输出部分的增益固定在5。有关输出驱动器的详细信息,请参阅MOSFET驱动器放大器部分。
热敏电阻设置
热敏电阻与温度呈非线性关系;在指定的温度范围内,将适当的R值与热敏电阻。首先,必须知道热敏电阻的电阻,其中:
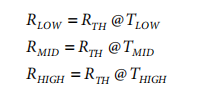
T低和大腿是温度范围的终点,TMID是平均值。在某些情况下,只有B常数可用,使用以下公式计算RTH:
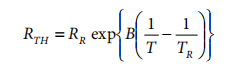
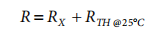
式中:RTH是T[K]处的阻力。RR是TR[K]处的电阻。RX的计算公式如下:

热敏电阻放大器(Chop1)
Chop1放大器可用作热敏电阻输入放大器。在图17中,输出电压是热敏电阻温度的函数。OUT1处的电压表示为:
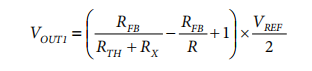
其中:RTH是热敏电阻。RX是一个补偿电阻。R使用以下公式计算:
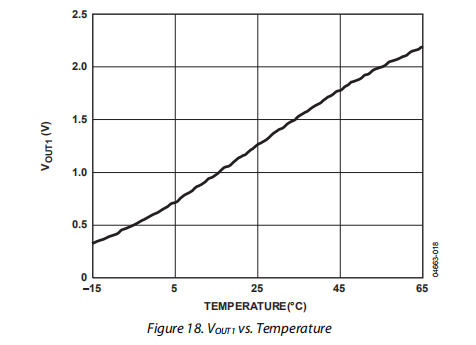
VOUT1在25°C时以VREF/2为中心。典型的如图17所示,平均温度与电压之比在+5°C至+45°C范围内,系数为-25 mV/℃。
PID补偿放大器(Chop2)
使用Chop2放大器作为PID补偿放大器。
OUT1处的电压输入PID补偿放大器。PID补偿放大器的频率响应由补偿网络决定。在IN2P处施加温度设定电压。在图17中,使用以下公式计算OUT2处的电压:

用户设置精确的补偿网络。这个网络从简单的积分器到PI、PID或任何其他类型的网络。用户还确定补偿类型和组件值,因为它们取决于对象和TEC的热响应。经验确定这些值的一种方法是向IN2P输入阶跃函数,从而改变目标温度,并调整补偿网络以最小化TEC温度的稳定时间。
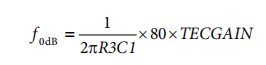
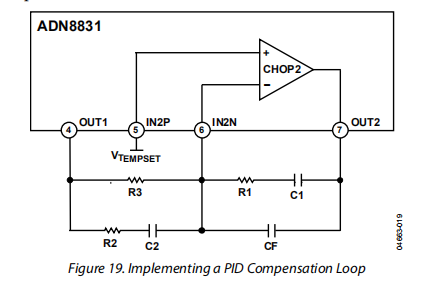
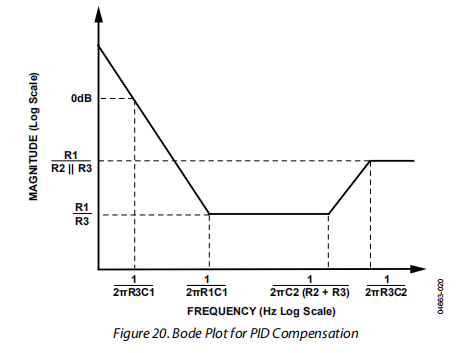
激光模块温度控制的典型补偿网络是由一个极低频极点和两个高频零点组成的PID回路。图19显示了一个用于实现PID补偿的简单网络。为了降低控制回路的噪声灵敏度,在高于零的频率处增加一个额外的极点。震级的波德图如图20所示。前馈放大器的单位增益交叉频率使用以下公式计算:
为了确保稳定性,单位增益交叉频率应低于TEC和热敏电阻的热时间常数。然而,这个热时间常数有时是不明确的,使其难以表征。关于环路稳定的文章有很多,讨论优化补偿网络的所有方法和权衡超出了本数据表的范围。
使用ADN8831-EVALZ板an-695,应用说明显示如何确定PID网络组件以获得稳定的TEC子系统性能。
MOSFET驱动放大器
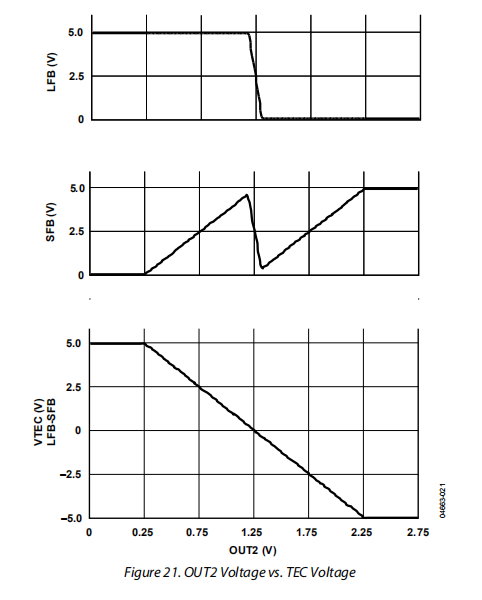
ADN8831有两个独立的MOSFET驱动器:开关输出或脉冲宽度调制(PWM)放大器和高增益线性放大器。每个放大器都有一对输出,驱动外部mosfet的栅极,进而驱动TEC,如图17所示。通过SFB(引脚23)和LFB(引脚27)监测TEC上的电压。虽然这两种MOSFET驱动器实现相同的结果,提供恒定的电压和大电流,但它们的操作是不同的。这两个输出的精确方程是:
其中:VOUT2是OUT2(引脚7)处的电压。VB由VDD确定为:
OUT2(引脚7)处的电压由补偿决定接收温度设定电压和热敏电阻的网络输入放大器提供的电压。VLFB的下限为0 V以及VDD的上限。图21显示了这些方程。
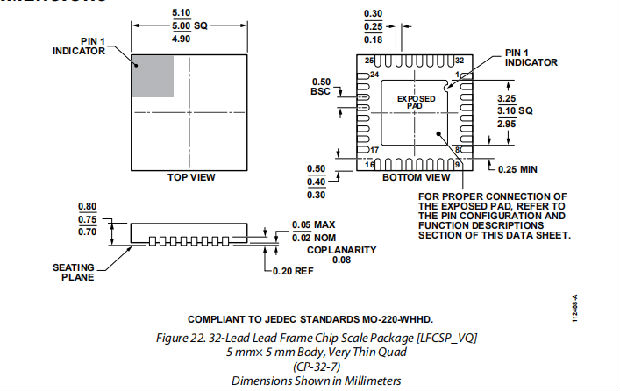
外形尺寸