HMC1055点击型号即可查看芯片规格书
1100点击型号即可查看芯片规格书
R1A点击型号即可查看芯片规格书
特征
3个精密传感器组件
X-Y轴2轴磁阻传感器地球磁场探测 用于Z轴地球的单轴磁阻传感器现场检测 用于60°倾斜补偿的2轴加速计 2.7至5.5伏供电范围 包括三轴罗盘参考设计
产品描述
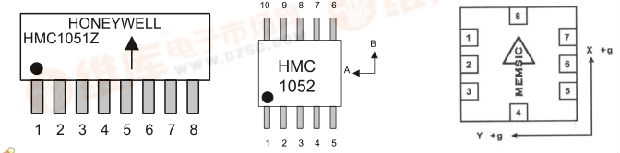
霍尼韦尔HMC1055三轴罗盘传感器组将流行的HMC1051Z单轴和HMC1052双轴磁阻传感器加2-单轴MEMSIC MXS3334UL加速度计配套元件。通过组合这三个传感器包,OEM指南针系统设计师将拥有需要创建自己的倾斜补偿块指南针设计使用这些经验证的组件。HMC1055芯片组包括三个传感器集成电路及应用说明传感器功能、参考设计和设计提示将指南针功能集成到其他产品中平台
 200228141041.png" />
200228141041.png" />
应用说明
HMC1055芯片组由三个传感器组成,这些传感器被封装成用于倾斜补偿电子器件的集成电路罗盘开发。这三个传感器由霍尼韦尔HMC1052双轴磁场传感器组成,一个霍尼韦尔HMC1051Z单轴磁传感器,和Memsic MXS3334UL双轴加速度计。传统上,指南针是用两轴磁传感器保持水平(垂直于重力轴)来完成的从南极到北极感应地球磁场的水平矢量分量。由罗盘包括第三轴磁传感器和两轴加速度计,用于测量俯仰和侧倾可以电子“万向节”和可以指向北极,无论水平。HMC1052双轴磁传感器包含两个各向异性磁(AMR)传感器元件单MSOP-10包。每个元件都是一个完整的惠斯通电桥传感器,可改变电桥的电阻磁电阻与其灵敏轴上的矢量磁场分量成比例。上的两座桥HMC1052的方向彼此正交,因此磁场的二维表示可以被测量。这些电桥有一个公共的正极电桥电源连接(Vb);并且与所有电桥接地连接连接在一起,形成完整的双轴磁传感器。每个电桥大约有1100欧姆负载电阻,因此每个电桥将从典型的数字电源中吸取几毫安的电流。这个电桥输出引脚将呈现与暴露磁场强度和桥上的电压供应量。因为地球的总磁场强度很小(~0.6高斯),地球磁场中每一个电桥的矢量分量甚至更小,只产生几毫伏标称电桥供电值。仪表放大器电路;与差分电桥输出接口,以及将传感器信号放大数百倍,然后将每个电桥电压输出。HMC1051Z是8针SIP封装中的附加磁传感器,用于将传感器硅芯片垂直放置相对于印刷电路板(PCB)位置的方向。将HMC1052平放(水平)在PCB和HMC1051Z垂直,地球磁场的所有三个矢量分量(X、Y和Z)都被感应到。通过磁场的Z轴分量,电子罗盘可以任意定向;并且通过倾斜传感器,执行倾斜补偿罗盘航向测量,就像PCB完全水平一样。
HMC1055型
先进的信息传感器产品
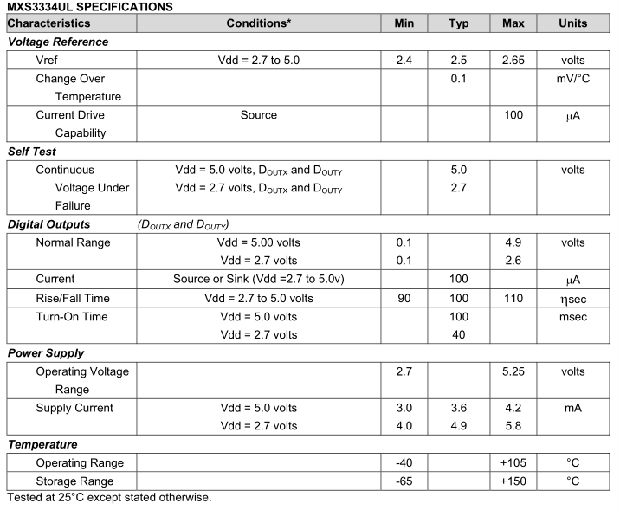
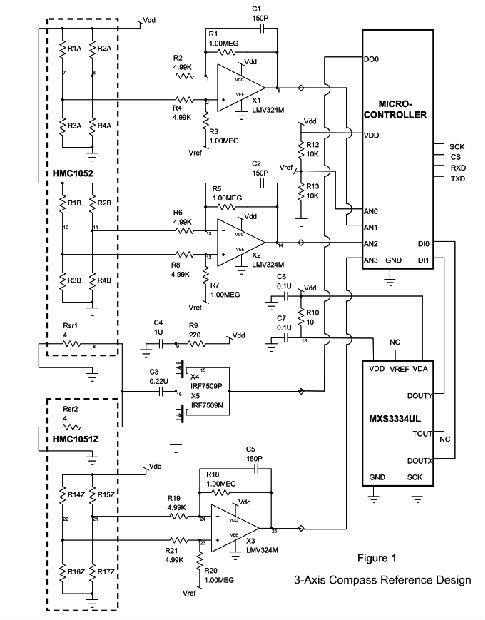
MXS3334UL是8针LCC封装中的双轴加速计,提供地球的引力场。当MXS3334UL保持水平并水平放置在PCB上时,两个数字输出提供50%占空比的100 Hz脉冲宽度调制(PWM)方波。因为加速度计是从水平到垂直倾斜或滚动,双工作循环和双工作循环将改变其工作的正负20%从50%中心点开始。图1中的参考设计显示了包含HMC1055的所有三个传感器元件的参考设计用于倾斜补偿电子罗盘的芯片组,由一个5.0伏的稳压电源(称为Vdd)工作。HMC1052传感器桥元件A和B称为R1A、R2A、R3A、R4A和R1B、R2B、R3B、R4B分别创建一个分压网络,将标称2.5伏电压放入后续放大器中阶段。HMC1051Z传感器电桥元件R14Z、R15Z、R16Z和R17Z也进行类似的分压方法到其放大级。
在本设计中,每个放大器级使用来自公共LMV324M四运算放大器的单个运算放大器(运放)-安培集成电路(IC)。例如,电阻器R1、R2、R3和R4加上电容器C1将运算放大器X1配置为电压增益约200的仪表放大器。这些仪表放大器电路接受电压传感器电桥的差异,并将信号放大,以便在微控制器上显示模拟到数字转换器(ADC)输入,表示为AN1、AN2和AN3。因为零磁场参考水平是2.5伏,每个仪表放大器电路从电阻分压器电路接收2.5伏参考电压(Vref)由R12和R13组成。例如,HMC1052桥a上的+500毫伏高斯地球场将产生2.5毫伏的电压差在传感器电桥输出引脚处(0.5高斯乘以1.0mV/V/高斯灵敏度额定值)。这是2.5毫伏乘以200,表示0.5伏偏移量,参考2.5伏Vref,表示AN1处的总电压+3.0伏。同样,任何桥B和HMC1051Z桥的正负磁场矢量转换为电压在AN2和AN3的陈述。
微控制器还直接从Doutx接收来自mxs334ul加速计的传感器输入,并且双倍于两个数字输入,表示为DI0和DI1。或者,MXS3334UL温度输出引脚(Tout)可以路由到另一个微控制器ADC输入以进一步补偿传感器输入的温度。供电从5.0伏Vdd电源直接连接至MXS3334UL至加速计VDA引脚,并通过10号端口连接至Vdd引脚欧姆电阻(R10)用于适度的数字噪声去耦。电容器C6和C7在加速计和整个罗盘电路。电子罗盘的设定/复位电路由mosfetx4和X5、电容器C3和C4以及电阻器R9。设置/复位电路的目的是重新校准磁传感器电桥中的磁矩当它们暴露在强磁场中时,如扬声器磁铁、磁化的手动工具或大电流导体,如焊接电缆或供电馈线。设置/复位电路由微控制器切换每个逻辑状态转换在HMC1052和HMC1051Z。
操作细节
在罗盘电路完全通电的情况下,传感器桥A在OUTA和OUTA之间产生电压差+然后放大200倍并呈现给微控制器模拟输入端AN1。同样,桥B和桥C创建一种电压差,放大200倍后显示给微控制器模拟输入端AN2和AN3。这些在AN1和AN2处的模拟电压可以被认为是磁场的“X”和“Y”矢量表示。这个第三个模拟电压(AN3)加上来自加速计的倾斜信息,被加到X和Y值中以产生倾斜补偿X和Y值,有时指定为X'和Y'。为了提取这些X、Y和Z值,AN1到AN3的电压将通过微控制器的板载模数转换器(ADC)。根据ADC的分辨率指南针的位置。通常,带有1度增量显示的圆规将具有10位或更大的ADC8位ADC更适合基本的8基数点(北、南、东、西和对角线点)指南针。单个微控制器的选择有大量不同的ADC实现,并且是ADC参考电压和指南针参考电压可以共享的实例。
AMR罗盘电路中最常被问到的问题是设定/复位带必须脉冲频率。这个对于大多数低成本的罗盘来说,答案并不常见;从每秒一次的范围到每个罗盘一次用户选择菜单。当设置电路在每个脉冲的基础上消耗很少的能量时,恒定的每个脉冲二流可以在不到一年的时间里消耗掉一块新的手表电池。在一个“设定”脉冲的另一个极端用户手动请求指南针航向,电池寿命影响可以忽略不计。从一个普通人从感觉的角度来看,设定的脉冲间隔应选择为用户能够承受不准确脉冲的最短时间指南针在指南针电路暴露于附近的大磁源后的航向。典型自动装置低成本罗盘的间隔可以是每10秒一次,也可以是每小时一次,具体取决于电池的电量能力。提供用户命令的“设置”功能可能是定期或自动设置的一种方便的替代方法日常工作。在便携式消费电子应用中,如指南针手表、掌上电脑和无线电话;选择适当的罗盘航向数据流对电路能耗有较大影响。例如,一个运动手表的航向每秒更新率可以使指南针电路保持在接近99%的关闭状态手表的寿命,每秒只有10毫秒的测量快照和每分钟一次的设定脉冲用于允许修正。HMC1052和HMC1051Z传感器的磁场感应带宽为5 MHz,因此最小快照测量时间主要由运算放大器的稳定时间加上样品得出-以及微控制器ADC的保持时间。在无线电话和掌上电脑的一些“游戏”应用中,更频繁的标题更新允许虚拟现实软件反应的传感器输入。通常,这些更新率遵循一个多世纪前的先例电影产业(“电影”)每秒更新20次或更多。在创造价值的同时在这些频繁更新之间的时间段内,有些用户可能只选择打开传感器网桥的电源排他性地优化电路的其余部分以降低功耗。
罗盘固件开发
要实现具有倾斜补偿的电子罗盘,必须开发微控制器固件来采集传感器向最终用户系统输入并将其解释为有意义的数据。通常固件可以是分为逻辑例程,如初始化、传感器输出采集和原始数据操作、标题计算、校准程序和输出格式。对于传感器输出数据采集,微控制器输入端AN0到AN3的模拟电压被数字化并结果是一个代表测量电压的“计数”数字。对于指南针,ADC的绝对意义计数缩小到传感器的毫秒高斯测量是不必要的,但是重要的是参考零高斯ADC计数电平。例如,8位ADC有512个计数(0到511个二进制数),那么计数255将是零偏移和零高斯值。实际上,由于传感器电桥(电桥偏移电压)的公差乘以放大器增益级加上放大器造成的任何偏移误差;以及来自硬铁效应的磁误差(磁化材料附近)。通常工厂或用户在清洁的磁性环境中进行的校准程序从中间ADC刻度获得计数的校正值。进一步调整每个磁修正值一旦指南针组件到达最终用户位置,强烈要求传感器轴移除磁性环境偏移。例如,测量AN0(Vref)的结果约为计数255,测量AN1、AN2和AN3的结果分别在331、262和205次计数中。下一个31、-5和20计数的校准值将被减去结果修正值分别为301、267和205。如果已知俯仰和横摇为零,那么(Z轴输出)值可以忽略,倾斜校正的X轴和Y轴值将是AN1的校正值和AN2减去AN0的电压参考值。计算得到arctan[y/x]或arctan[(267-255)/(301-255)]或者在磁北偏东14.6度。
先进的信息传感器产品航向计算
一旦磁传感器轴输出被收集并减去校准校正,下一步航向计算是收集来自MEMSIC mxs334ul加速度计输出的俯仰和侧倾数据。MXS3334UL在完全水平(零倾斜)条件下产生100Hz,50%占空比脉冲宽度调制(PWM)数字波形,其Doutx和Douty引脚对应于X和Y敏感轴。这些当各轴完全倾斜(±1g)时,输出引脚的占空比将从30%改变为70%。脉宽调制的标度输出是严格的重力,因此45度的倾斜会导致707毫-克或从50%的中心旋转±14.1%点占空比。MXS3334UL的正X轴方向朝向用户平台的前部,俯仰向下将导致减小的脉宽调制占空比,同时增大占空比。同样,Y轴箭头是90逆时针方向旋转,导致左滚对应于占空比降低,右滚对应于增加占空比。测量微控制器的俯仰和横摇数据相当简单,因为双发送和双逻辑信号可发送至微控制器数字输入引脚进行占空比测量。在固件开发或工厂校准时,应使用中断或看门狗定时器功能,以缩放100赫兹(10毫秒)的边缘。然后测量Doutx和Douty上升沿的下降沿(占空比计算)应该是时钟周期计数的过程。例如,一个1兆赫时钟微控制器每上升沿应计10000个周期,上升沿应计5000个周期下降沿代表50%的占空比或零度俯仰或侧倾。一旦测量每个轴输出的占空比并将其数学转换为重力值,这些如果用户需要真实的俯仰和侧倾角度,可以将这些值与内存映射表进行比较。例如,如果俯仰和横滚数据以一度增量已知,可以创建91点地图来匹配重力值(符号无关)和相应的度数指示。因为倾斜补偿指南针需要俯仰角和横滚角的正弦和余弦,重力数据的格式已经在0和1之间也不需要三角函数的内存映射。俯仰和侧倾的重力角已经合适了角度的正弦值和余弦值只是正弦值的1减去(余弦=1–正弦)。
方程式:
从原始X、Y和Y磁传感器输入加上螺距、然后滚动角。计算出X'和Y'后,罗盘航向可通过以下公式计算:方位角(航向)=反正切(Y’/X’)要执行弧切三角函数,需要实现内存映射。谢天谢地在每个90°象限重复,因此对于一度罗盘分辨率要求,90个弧的映射商-可以使用切线函数。如果需要0.1°分辨率,则需要900个位置,只有180个位置0.5°分辨率。此外,对于0°、90°、180°的零和最小情况,还需要特殊情况商检测,商计算前270°。计算航向后,可增加两个航向修正系数来处理偏角和平台角度误差。磁偏角是磁极和几何北极之间的差,以及根据用户指南针平台的纬度和经度(全局位置)而变化。如果你有权全球定位卫星(GPS)信息导致经纬度计算,然后是磁偏角可以计算角度或绘制内存映射以进行航向校正。如果传感器与用户平台的机械特性不完全一致。这些角度误差可以插入固件开发和/或工厂校准。
罗盘校准
在描述原始磁传感器数据的段落中,从输入端AN0到安三。固件校准程序将为“硬铁”的校准系数创建Xoff、Yoff和Xsf以及Ysf传感器处地球磁场的扭曲。通常这些畸变来自附近的磁化组件。软铁变形更复杂,不考虑导坑值,通常忽略低值成本比较应用程序。非磁化铁材料弯曲磁场引起的软铁变形要么离传感器很近,要么体积很大。把指南针放在远离铁质材料的地方是最好的减少错误。受益金额取决于含铁材料的数量及其接近罗盘平台。为了得出校准系数,传感器总成(平台)及其固定的端部平台(如手表/人、船,当罗盘电子设备收集到许多连续的读数时,至少转动一整圈。转弯的速度和速率取决于微控制器收集和处理X、Y和Z数据的速度在校准程序中。一个好的经验法则是每几度收集一次读数旋转进行几次旋转或保持旋转足够慢以收集正确转动率的读数。校准过程中的Xh和Yh读数是在Xoff和Yoff为零值,轴比例因数(Xsf和Ysf)单位值。然后,将收集的校准X和Y值制成表格,找出X和Y的最小值和最大值Y、 在校准会话结束时,Xmax、Ymax、Xmin和Ymin值将转换为以下值:
如果端部平台不能倒转,则Z轴数据通常不进行校正。便携式或手持应用程序,然后指南针组件可以颠倒,Zoff可以像Xoff和Yoff那样计算,但是只有两个参考点(直立和倒置)。Zoff的工厂值可能是唯一可能的值。如前所述,通过减去偏移量来创建校正的X、Y和Z计数值。规模因子值仅在从偏移校正轴计数减去Vref计数后使用。更多细节关于铁效应的校准,见白皮书“磁阻传感器在导航系统中的应用”由于每个传感器轴的传感器电桥偏移电压引起的偏移是Xoff、Yoff和Zoff计算的一部分。这些即使没有磁场干扰,也存在偏移。为了找到它们的真实值,设置和重置驱动电路可在每次转换后不久进行测量时切换。复位脉冲后,磁场部分当偏移量保持不变时,传感器电桥的极性将发生翻转。因此,在复位和设定的脉冲可以相加。总额的磁性部分将被抵消,只剩下一个双倍偏移量的值。然后,可以将结果除以2,得出桥偏移量。知道电桥偏移量的原因是偏移量会随温度漂移。用户是否需要最好的航向精度,每次遇到新的温度时应进行新的校准环境。有关罗盘设计的进一步考虑,请参阅应用说明AN-212、AN-213和AN-214。
