设计用于感应负载的双向脉宽调制(PWM)电流控制,A353S-能够连续输出电流±1.3 A和工作电压为50 V。内部固定关断时间PWM电流控制电路可用于将最大负载电流调节到期望值。峰值负载电流限制由用户选择输入参考电压和外部感测电阻器来设置。固定关闭时间脉冲持续时间由用户选择的外部RC定时网络设置。内部电路保护包括滞后热关机、瞬态抑制二极管和交叉电流保护。不需要特殊的通电顺序。
在使能输入保持低的情况下,相位输入通过选择适当的源和汇驱动器对来控制负载电流极性。模式输入决定了pwm电流控制电路是在慢电流衰减模式下工作(仅选择源驱动器切换)还是在快速电流衰减模式(选定的源和汇切换)。用户可选择的消隐窗口可防止错误触发脉冲宽度调制电流控制电路。当使能输入保持在高位时,所有输出驱动程序都被禁用。提供睡眠模式以降低功耗。
当逻辑低应用于制动输入时,制动功能启用。此覆盖启用和阶段以关闭两个源驱动程序并同时打开两个接收器驱动程序。制动功能可用于动态制动电刷直流电动机。
A3953S-有两种电源包可供选择:一种是带铜散热片的16针双列直插式塑料包,另一种是带铜散热片的16针塑料SOIC。对于这两种封装类型,电源标签处于地电位,不需要电隔离。
特征
±1.3 A连续输出电流休眠(低电流50 V输出额定电压消耗)模式3 V至5.5 V逻辑电源电压内部瞬态内部PWM电流控制抑制二极管饱和阱驱动器(低于1A)内部热快速和慢速电流衰减模式关闭电路;汽车用交叉电流和紫外线防护。
功能描述
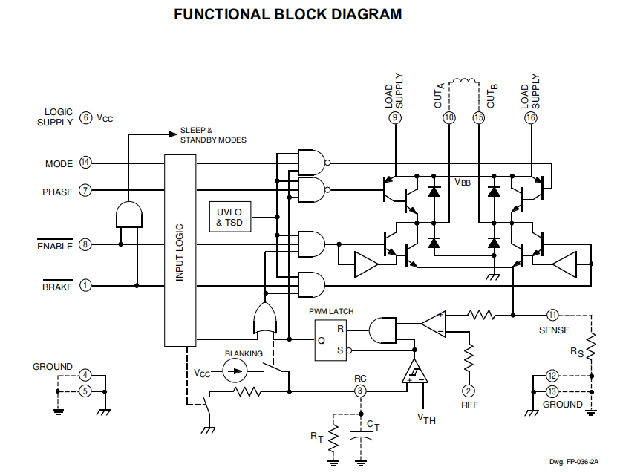
正向和反向操作期间的内部脉宽调制电流控制。A3953S-包含一个固定的非定时脉冲宽度调制(PWM)电流控制电路,可用于将负载电流限制在所需值。电流限制(ITRIP)的峰值通过选择外部电流感测电阻器来设置(RS)和参考输入电压(VREF)。内部电路将外部感测电阻器上的电压与参考输入端(REF)上的电压进行比较,导致跨导函数近似为:
其中iso是由于基极驱动电流引起的偏移量。
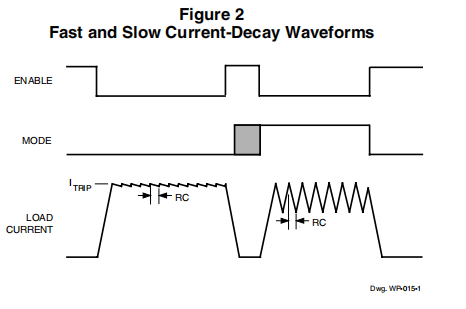
在正向或反向模式下,电流控制电路将负载电流限制如下:当负载电流达到itrip时,比较器将重置一个锁存器,该锁存器将关闭所选源驱动器或所选接收器和源驱动器对,具体取决于设备分别在慢速或快速电流衰减模式下工作。
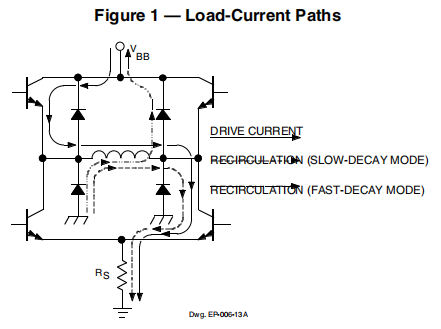
在慢电流衰减模式下,所选源驱动器被禁用;负载电感导致电流通过接收器驱动器和接地钳位二极管再循环。在快速电流衰减模式下,选定的接收器和源驱动器对被禁用;负载电感使电流通过接地钳位和反激二极管从地面流向负载电源。
用户选择外部电阻器(RT)和电容器(CT)来确定驱动器保持禁用状态的时间段(TOFF=RT x CT)(参见下面的“RC固定关闭时间”)。在rc间隔结束时,驱动程序被启用,允许负载电流再次增加。脉冲宽度调制周期重复,将峰值负载电流保持在所需值(见图2)。
制动操作-模式输入高。制动电路关闭两个源驱动器并打开两个接收器驱动器。对于直流电动机的应用,这会导致电动机的反电动势电压短路,从而产生动态制动电动机的电流流。如果反电动势电压很大,并且没有pwm电流限制,负载电流可以增加到接近堵转状态的值。为了限制电流,当达到itrip电平时,pwm电路将禁用传导接收器驱动器。储存在电机电感中的能量被释放到负载电源中,导致电机电流衰减。
在正向/反向操作的情况下,驱动程序在toff=rt x ct给定的时间后启用(见下面的“rc固定关闭时间”)。取决于反电动势电压(与电机的减速成比例),负载电流可能再次增加到ITRIP。如果是这样,则会重复进行脉宽调制周期,将峰值负载电流限制在所需值。
在制动期间,当模式输入高时,峰值电流极限可以近似为:
注意:因为储存在电机中的动能和负载惯性被转换成电流,从而为VBB电源的体积电容(电源输出和去耦电容)充电,必须注意确保电容足以吸收能量,而不超过连接到电机电源的任何设备的额定电压。
制动操作-模式输入低。在制动过程中,当模式输入低时,内部电流控制电路被禁用。因此,应注意确保电机的电流不超过设备的额定值。制动电流可以通过使用电流探头连接到电动机的一个引线上的示波器来测量,或者如果已知电动机的反电势电压,由:
钢筋混凝土固定关闭时间。内部的脉宽调制电流控制电路使用一次触发来控制驱动器保持关闭的时间。一次触发时间toff(固定关闭时间)由选择从rc定时端子到接地并联连接的外部电阻(rt)和电容(ct)来确定。固定截止时间,在CT值=470 pF到1500 pF和rT=12 K到100 K的范围内,近似为:
该电路的操作如下:当PWM锁存器被电流比较器复位时,RC端子上的电压将开始从大约0.60VCC衰减。当RC端子上的电压达到约100伏时,设置PWM锁存器,从而使驱动器(s)。
钢筋混凝土下料。除了确定pwm控制电路的固定关闭时间外,ct组件还设置比较器消隐时间。当内部电流控制电路(或相位、制动或启用输入)切换输出时,此功能将使比较器的输出为空白。比较器输出被屏蔽,以防止由于钳位二极管的反向恢复电流和/或与负载中的分布电容有关的开关瞬态而引起的假过电流检测。
在内部PWM操作期间,在TOFF时间结束时,比较器的输出被消隐,并且CT开始由大约0.22VCC由大约1毫安的内部电流源充电。比较器输出保持空白直到CT上的电压达到约0.60VCC。
当相位输入发生转换时,CT在交叉延迟时间(交叉延迟时间存在以防止源和汇驱动器同时导通)期间被放电到近地。在交叉延迟之后,CT由大约1毫安的内部电流源充电。比较器输出保持空白直到CT上的电压达到约0.60VCC。
当设备被禁用时,通过启用输入,CT被放电到接近地面。当设备被重新启动时,CT由大约1毫安的内部电流源充电。比较器输出保持空白直到CT上的电压达到大约0.60立方厘米。
对于3.3V操作,CT的最小建议值为680pF5%。对于5.0V操作,CT的最小建议值为470 pF 5%。±±这些值确保消隐时间足以避免在正常工作条件下比较器的误跳闸。为了实现负载电流的最佳调节,建议使用上述CT值,并可调整RT值以确定TOFF。
采用内部pwm电流控制电路的负载电流调节
当设备在慢电流衰减模式下工作时,有一个最低限度的限制,即pwm电流控制电路可以调节负载电流。该限制是最小占空比,它是用户选择的toff值和每次复位pwm锁存器时出现的最小开启时间脉冲ton(min)max的函数。如果电机不旋转(如在步进电机处于保持/制动模式时,当停顿时,或在启动时刷直流电机),电流调节的最坏情况值可以近似为:

当电机旋转时,产生的反电动势会影响上述关系。对于电刷直流电动机应用,电流调节得到改善。对于步进电机的应用,当电机旋转时,效果更为复杂。下面关于步进电机的章节将讨论这个问题。
以下程序可用于评估系统中最坏情况下的慢电流衰减内部脉宽调制负载电流调节:
将VREF设置为0伏。在负载连接且脉宽调制电流控制在慢电流衰减模式下工作的情况下,使用示波器测量斩波输出的低输出(吸合)时间。这是设备的典型最小开启时间(吨(分钟)类型)。然后应增加CT,直到吨(min)的测量值等于电特性表中规定的吨(min)max。当CT的新值设定后,应降低RT值,以便TOFF=RT x CT(CT的人为增加值)的值等于标称设计值。最坏情况下的负载电流调节可在系统运行条件下测量。
设备已启用内部电流控制电路将激活,并可用于限制慢电流衰减模式下的负载电流。
对于对使能输入进行pwm并要求内部限流电路在快速衰减模式下工作的应用,使能输入信号应反转并连接到模式输入。这可以防止设备在启用输入低时切换到睡眠模式。
相位调制。切换相位终端可选择启用哪一个接收器/源对,产生随占空比变化且始终保持连续的负载电流。这在双向电刷直流伺服电机应用中有额外的好处,因为相输入的占空比和应用于电机的平均电压之间的传递函数比启用pwm控制(在低电流水平下产生不连续电流)的情况下更为线性。有关更多信息,请参阅下面的“直流电机应用”。
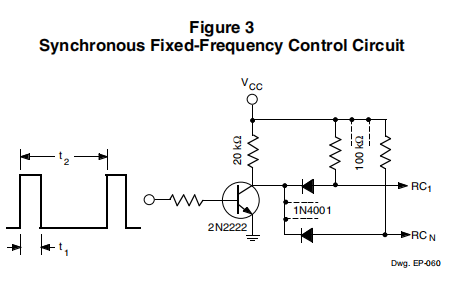
同步定频脉冲宽度调制。使用图3所示的简单电路,可以同步多个A3953S设备的内部PWM电流控制电路。555 ic可用于产生装置的复位脉冲/消隐信号(t1)和pwm周期(t2)。T1的值应该是至少1.5 ms。在这种配置中使用时,应省略RT和CT组件。由于没有与其转换同步的消隐功能,相位和使能输入不应采用此电路配置的pwm。
其他信息。应用于使能和模式终端的逻辑高将设备置于睡眠模式,以在不使用时最小化电流消耗。
内部产生的死区时间可防止切换相位或制动时出现交叉电流。
如果接头温度达到165°C(典型),热保护电路将关闭所有驱动器。这样做的目的只是为了防止设备因结温过高而发生故障,并不意味着允许输出短路。热关断电路的滞后约为15°C。
应用说明
电流感应。由于驱动器关闭延迟,实际峰值负载电流(IPEAK)将高于ITRIP的计算值。超调量可以近似为:

其中vbb为电机供电电压,vbemf为负载反电势电压,rload和lload分别为负载电阻和电感,tpwm(off)在电气特性表中规定。
基准端子具有±5μA的最大输入偏置电流。当确定设置基准电压值的外部电路的阻抗时,应该考虑该电流。
为了最小化由接地迹线i x r下降引起的电流传感不准确度,电流传感电阻器应具有到设备接地端子的单独回路。对于低值感测电阻器,印制线路板中的I x R降可能很大,应予以考虑。应避免使用插座,因为插座的接触电阻会导致RS有效值的变化。
通常,rs值越大,上述影响越小,但会导致感测电阻器的过热和功率损耗过大。选择的RS值不应导致绝对最大额定电压为1 V(0.4 V的VCC = 3.3 V操作),为感官终端,将超过。
电流感应比较器的功能一直到地面,允许该设备用于微步进、正弦和其他不同的电流剖面应用。
热因素。为了可靠地运行,建议将最大结温保持在110°C以下至125°C。通过将热电偶连接到器件的电源Tab/ButWin和测量TAB温度TTAB,可以最好地测量结温。然后可以使用公式近似地计算结温:

其中,VF可从给定ILOAD水平的电气规范表中选择。R的值在相应封装的封装热阻表中给出。
通过将一段印刷电路板铜(通常为6到18平方厘米)连接到设备的蝙蝠翼终端,蝙蝠翼封装的功耗可以提高20%到30%。
在高负载电流和/或高占空比下运行的应用中,可以通过添加与内部二极管并联的外部二极管来提高热性能。在内部pwm慢衰减应用中,只需要添加两个接地钳位二极管。对于内部快速衰减PWM,或外部相位或使能输入PWM应用,所有四个外部二极管应增加最大结温降低。
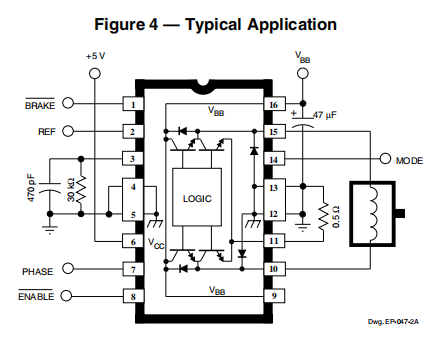
印刷电路板布局。负载电源端子VBB应与电解电容器分离(建议大于47μF),尽可能靠近设备。为了最小化系统接地i x r降对逻辑和参考输入信号的影响,系统接地应具有低电阻返回到电机电源电压。
固定关闭时间选择。随着toff值的增大,开关损耗减小,低电平负载电流调节改善,emi降低,pwm频率降低,纹波电流增大。可以选择toff值来优化这些参数。对于涉及可听噪声的应用,toff的典型值选择在15 ms到35 ms的范围内。
步进电机应用。该模式终端可用于优化微步进/正弦步进电机驱动应用中的器件性能。当负载电流增大时,采用慢衰减方式来限制器件的开关损耗和电机的铁损。这也提高了负载电流可以增加的最大速率(与快速衰减相比),因为在TOFF期间衰减速率很慢。当负载电流减小时,使用快速衰减模式将负载电流调节到所需水平。这可以防止步进电机的反电动势电压引起电流波形的拖尾。
在对负载施加恒定电流的步进电机应用中,慢衰减模式pwm通常用于限制装置中的开关损耗和电机中的铁损耗。
直流电机应用。在闭环系统中,直流电动机的速度可以通过相位或使能输入的pwm或通过改变参考输入电压(ref)来控制。在数字系统(微处理器控制)中,通常使用相或使能输入的pwm,从而避免产生可变模拟电压基准。在这种情况下,通常使用REF输入端的DC电压来限制最大负载电流。
在需要低速或零速精确定位的直流伺服应用中,通常选择相输入的pwm。这简化了伺服控制回路,因为相输入占空比和施加到电机的平均电压之间的传递函数比启用pwm控制(在低电流水平下产生不连续电流)的情况下更为线性。
采用双向直流伺服电机,相位端子可用于机械方向控制。与动态制动电机类似,旋转电机方向的突然变化产生反电动势产生的电流。产生的电流将取决于操作模式。如果不使用内部电流控制电路,则可以产生最大负载电流。
iload=(vbemf+vbb)/rload,其中vbemf与电机转速成比例。如果使用内部慢电流衰减控制电路,则可以通过ILoAD= VBEMF/RLADE来近似产生的最大负载电流。对于这两种情况,必须注意确保设备的最大额定值不超过。如果使用内部快速电流衰减控制电路,则负载电流将调节至以下给定值:
注意:在快速电流衰减模式下,当电机的方向突然改变时,电机中存储的动能和负载惯性将转换为向VBB供电体电容(电源输出和去耦电容)充电的电流。必须注意确保电容足以吸收能量,而不超过连接到电机电源的任何设备的额定电压。