AD600点击型号即可查看芯片规格书
125点击型号即可查看芯片规格书
625点击型号即可查看芯片规格书
特征:具有独立增益控制线性in-db增益响应的2通道;2增益范围;AD600:0分贝至40分贝;AD602:–10分贝至+30分贝;精确绝对增益:?0.3dB;低输入噪声:1.4nV/√Hz;低失真:–60 dBc THD,输出±1 V;高带宽:直流至35兆赫(-3分贝);稳定群时延:±2ns;低功率:每个放大器125兆瓦(最大);每个放大器的信号选通功能;驱动高速ADC;提供符合MIL-STD-883标准和DESC版本。
应用:超声波和声纳时间增益控制;高性能音频和射频agc系统;信号测量。
一般说明
AD600/AD602双通道、低噪声、可变增益放大器经优化可用于超声成像系统,但适用于任何需要精确增益、低噪声和失真以及宽带宽的应用。每个独立信道在ad600中提供0分贝到+40分贝的增益,在ad602中提供-10分贝到+30分贝的增益。ad602的较低增益导致在输出处改善信噪比(snr)。然而,这两种产品的输入噪声频谱密度相同,均为1.4nv/√hz。分贝增益与控制电压成正比,校准准确,电源和温度稳定。
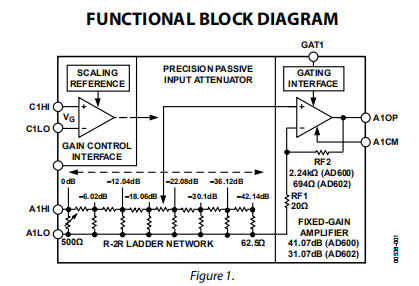
为了实现困难的性能目标,开发了一种专用电路形式,即X-AMP。x-amp的每个通道包括一个0分贝至-42.14分贝的可变衰减器和一个高速固定增益放大器。这样,放大器就不必处理大的输入,而且可以利用负反馈精确地定义增益和动态。衰减器实现为一个7级r-2r梯形网络,输入电阻为100Ω,激光微调为±2%。抽头点之间的衰减为6.02db;增益控制电路在这些抽头之间提供连续插值。得到的控制函数是线性的,单位为分贝。
增益控制接口是全差分的,提供~15 MΩ的输入电阻和32 dB/V(即31.25 mV/dB)的标度因数,由内部电压基准定义。该接口的响应时间小于1μs。每个通道还具有独立的选通设施,可选择性地阻止信号传输,并将直流输出电平设置在输出接地的几毫伏范围内。选通控制输入与TTL和CMOS兼容。
AD600的最大增益为41.07分贝,AD602的最大增益为31.07分贝;两种型号的-3分贝带宽名义上为35兆赫,基本上与增益无关。对于1 v rms输出和1 mhz噪声带宽,ad600的snr通常为76 db,对于ad602的snr通常为86 db。从100 kHz到10 MHz,振幅响应在±0.5 dB范围内平坦;在此频率范围内,在所有增益设置下,群延迟变化小于±2 ns。
每个放大通道可驱动100Ω负载阻抗,失真小。例如,在500Ω负载下,规定的峰值输出最小为±2.5 V,在100Ω负载下为±1 V。对于并联的200Ω负载(5 pF),10 MHz下±1 V正弦输出的总谐波失真通常为-60 dBc。
AD600J/AD602J指定在0°C至70°C的温度下工作,可用于16引线PDIP(N)和16引线SOIC U W封装。AD600A/AD602A规定在-40°C至+85°C的温度范围内运行,可在16铅CeRDIP(Q)和16铅SOIC U W封装中使用。AD600S/AD602S规定在-55°C至+125°C的温度范围内工作,可在16线中使用CERDIP(Q)封装,符合MIL-STD-883标准。AD600S/AD602S也可在DESC SMD 5962-94572下获得。
操作理论
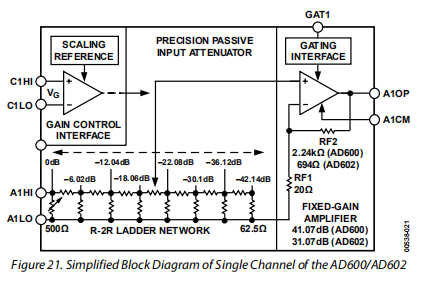
AD600/AD602具有相同的总体设计和功能。它们包括两个固定增益放大器,每个放大器前面都有一个0分贝到42.14分贝的电压控制衰减器,带有独立的控制接口,每个衰减器的标度因数为32分贝/伏特。AD600放大器经过激光微调,增益为41.07分贝(×113),提供-1.07分贝至+41.07分贝(0分贝至+40分贝重叠)的控制范围。AD602放大器具有31.07分贝(×35.8)的增益,并且提供-11.07分贝到+31.07分贝(带重叠的-10分贝到+30分贝)的总增益。
这种拓扑结构的优点是放大器可以利用负反馈来提高增益的精度。此外,由于放大器不必在其输入端处理大信号,失真可能非常低。这种方法的另一个特点是,小信号增益和相位响应,以及脉冲响应,本质上与增益无关。
图21是一个通道的简化示意图。输入衰减器是一个7级R-2R梯形网络,使用标称R=62.5Ω的未经修剪的电阻,其特性电阻为125Ω±20%。输入端包括一个并联电阻,并对其进行激光修整,以建立更精确的100Ω±2%的输入电阻,与外部电阻或电容器一起使用时,确保精确操作(增益和HP转角频率)。
当使用推荐的±5 V电源时,输入A1HI处的标称最大信号为1 V rms(±1.4 V峰值);尽管允许在高频失真和馈通有所增加的情况下运行到±2 V峰值。每个衰减器都有一个单独的信号lo连接,用于抑制输入和输出接地之间的电压共模。包括电路以提供高达±100 mV的抑制。
应用于梯形网络输入端的信号每段衰减6.02分贝;因此,对每个抽头的衰减依次为0分贝、6.02分贝、12.04分贝、18.06分贝、24.08分贝、30.1分贝、36.12分贝和42.14分贝。采用独特的电路技术在这些抽头点之间进行插值,如图21中的滑块所示,提供从0分贝到42.14分贝的连续衰减。
要了解AD600,它有助于思考从左到右移动滑块的机械方式;事实上,它是电压控制的。稍后将讨论控制接口的详细信息。注意,增益始终是精确确定的,并且增益和确定滑块位置的控制参数之间自动保证线性分贝关系。实际上,增益偏离理想规律的峰值约为±0.2db(见图28)。
注意,信号输入不是完全差分的。a1lo、a1cm(用于ch1)、a2lo和a2cm(用于ch2)提供对输入和输出接地的单独访问。这就认识到,即使在使用接地平面时,这些节点上的电压也会出现微小的差异。A1LO和A2LO必须直接连接到输入接地。这些连接中的显著阻抗降低了增益精度。A1cm和A2cm应连接到负载接地。
噪声性能
使用这种方法的一个重要原因是可以获得优越的噪声性能。衰减器内分接头处的标称电阻为41.7Ω(125Ω的三分之一),在27°C时,其约翰逊噪声谱密度(NSD)为0.84 nV/√Hz(即,√4ktr),占总输入噪声的很大一部分。放大器的第一级再贡献1.12nv/√hz,总输入噪声为1.4nv/√hz。
0分贝抽头处的噪声取决于输入是短路还是开路。短路时,最小NSD为1.12 nV/√Hz。打开时,第一个抽头100Ω的电阻产生1.29 nV/√Hz,因此噪声增加到1.71 nV/√Hz。如果AD600之前有一个900Ω的电阻器,以允许在输入端操作,最大值为±10 V rms,则最后一次计算将非常重要。然而,在大多数情况下,源的低阻抗限制了最大噪声电阻。
从前面可以明显看出,在梯形网络的设计中使用低电阻以实现低噪声是必要的。在某些应用程序中,这可能不方便,需要使用外部缓冲区或前置放大器。然而,很少有放大器在最大输入电平下将所需的低噪声和低失真结合起来,实现这一性能所需的功耗相当高(因为需要在处理大输入的同时保持非常低的电阻值)。另一方面,提供高输入阻抗的缓冲器几乎没有价值,因为通常的原因是高电阻源的负载最小化-与低噪声不兼容。
除了刚才提到的微小变化外,输出端的信噪比基本上与衰减器设置无关,因为最大未失真输出为1V rms,并且AD600输出端的NSD固定在113×114 nV/√Hz或158 nV/√Hz。因此,在1兆赫带宽中,输出信噪比为76分贝。AD600/AD602的输入NSD是相同的,但由于AD602的固定放大器的增益降低了10分贝,其输出信噪比提高了10分贝,或在1兆赫带宽中为86分贝。
增益控制接口
衰减通过差分高阻抗(15 MΩ)输入进行控制,标度因数为每伏32分贝,即31.25毫伏/分贝。两个放大器都有自己的控制接口。内部带隙基准确保了在电源和温度变化方面的标度稳定性,并且是两个通道共用的唯一电路。
当差分输入电压v=0 v时,衰减器滑块居中,提供+21.07 db的衰减,从而产生+20 db(–21.07 db++41.07 db)的总增益。当控制输入为-625毫伏时,增益降低+20分贝(=0.625×+32)至0分贝;当设置为+625毫伏时,增益增加+20分贝至+40分贝。当该接口在任一方向过驱动时,增益分别接近-1.07db(--42.14db++41.07db)或+41.07db(=0++41.07db)。
AD600的增益可以通过:Gain(dB) = 32 VG+ 20 (1)
其中V以伏特为单位:G;对于AD602,表达式是: Gain(dB) = 32 VG+ 10 (2)
在-625 mV dc到+625 mV dc的范围内为V指定操作。高阻抗增益控制输入确保在多通道应用中驱动多个放大器时的最小负载。差分输入配置在为各种控制方案选择适当的信号电平和极性方面提供了灵活性。
例如,增益控制输入可以差分地馈送到输入端,或者通过简单地将未使用的输入端接地来单端馈送。在另一示例中,如果增益由仅提供正的接地参考输出的dac控制,则增益控制lo管脚(c1lo或c2lo)应偏置到625 mv的固定偏移,以在增益控制hi(c1hi或c2hi)为零时将增益设置为0 db,并在1.25 v时将增益设置为40 db。
包括分压器以实现其他比例因子是一件简单的事情。当使用fs输出为2.55 v(10 mv/位)的8位dac时,1.6分频比(产生6.25 mv/位)导致增益设置分辨率为0.2 db/位。在本数据表的后面,当存在用于增益控制的各种选项时,级联ad600或ad602的两个部分(参见实现80 db增益范围部分)。
信号选通输入
AD600/AD602的每个放大器部分配备信号选通功能,由TTL或CMOS逻辑输入(GAT1或GAT2)控制。这些输入的接地参考分别是信号输入接地A1lo和A2lo。当该输入为低或左开路时,信道的操作不受影响。当此输入为HI时,信号传输被阻止。通道的直流输出电平设置在输出接地(A1cm或A2cm)的几毫伏范围内,同时噪声电平显著下降。减少噪声和杂散信号馈送在超声波束形成应用中是有用的,其中许多放大器的输出是总和。
共模抑制
一种特殊的电路技术提供了输入接地(A1lo和A2lo)和输出接地(A1cm和A2cm)之间出现的电压抑制。这是必要的,因为放大器的运放形式,如图21所示。反馈电压是通过rf1电阻产生的(为了实现低噪声,rf1电阻的值只有20Ω)。通过该电阻器产生的电压参考输入公共线,因此输出电压也参考该节点。
对于a1hi和a1lo之间的零差分信号输入,输出a1op仅跟随a1cm处的电压。注意,a1lo和a1cm(或a2lo和a2cm)之间可能存在的电压差范围限制在±100 mV左右。图18显示了典型的共模抑制比与频率的关系。
达到80分贝增益范围
x-amp的两个放大器部分可以串联以获得更高的增益。在这种模式下,a1(a1op和a1cm)的输出通过拒绝直流偏移的高通网络(通常只是电容器)驱动a2的输入。现在,AD600的标称增益范围为-2分贝至+82分贝,AD602为-22分贝至+62分贝。
在连接增益控制输入时有几个选项。选择取决于所需的信噪比和增益误差(输出纹波)。以下示例以ad600为特征;参数通常应用于ad602,并对增益值进行适当的更改。
顺序模式(最大信噪比)
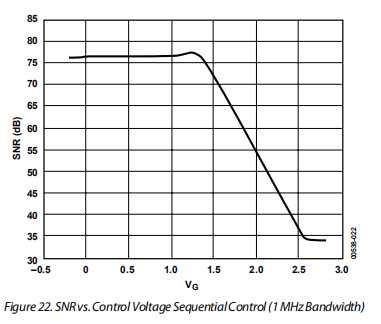
在顺序操作模式下,在尽可能多的增益控制范围内,信噪比保持在其最高水平,如图22所示。注意这里的增益范围是0分贝到80分贝。图23、图24和图25显示了实现这一点的一般连接。两个增益控制输入,c1hi和c2hi,由一个0-2.5v范围内的正极接地参考源并联驱动。
提供一个辅助放大器,用于感测输入和输出公共空间之间的电压差,以抑制该公共电压。

增益被抵消,使得A2的增益仅在A1的增益达到其最大值后才增加(见图26)。注意,对于小于等于-700 mV的差分输入,单个放大器(A1或A2)的增益在其最小值为-1.07 dB;对于大于等于+700 mV的差分输入,增益在其最大值为+41.07 dB。超出这些限制的控制输入不会影响增益,并且可以在响应中不受损坏或折叠的情况下耐受。有关允许电压范围的详细信息,请参阅“规格”部分。现在的收获是:Gain(dB) = 32 VC(3)
其中V是施加的控制电压。
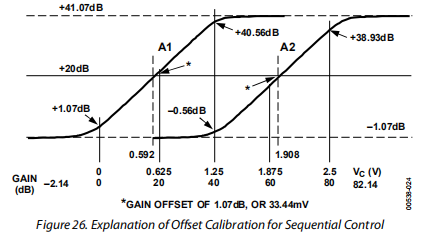
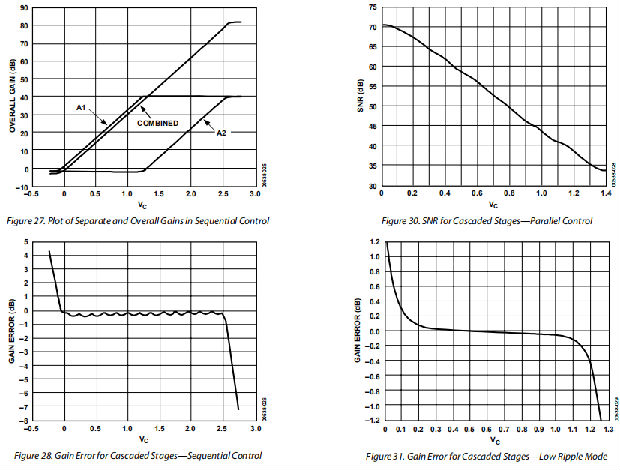
当v设为零时,v=-0.592v,a1的增益为CG1;1.07分贝(回想一下,对于V=625 mV);同时,V=-1.908 V,因此A2的增益为GG2=-1.07分贝。因此,总增益为0分贝(见图23)。当V=1.25 V时,V=1.25 V–0.592 V=0.658 V,这将增益A1设置为40.56 dB,而V=1.25 V–1.908 V=-0.658 V,这将增益A2设置为-0.56 dB。总增益现在是40分贝(见图24)。当v=2.5v时,a1的增益为41.07db,a2的增益为38.93db,总增益为80db(见图25)。图27进一步阐明了这种工作模式,图27是a1和a2的单独增益以及总增益与控制电压的关系图。图28是级联放大器的增益误差与控制电压的关系图。
并行模式(最简单的增益控制接口)
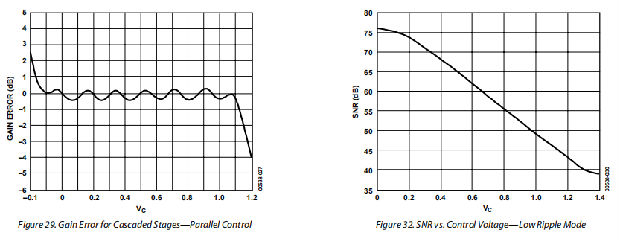
在该模式下,增益控制电压被施加到并联的两个输入端-c1hi和c2hi被连接到控制电压,c1lo和c2lo被选择性地连接到0.625v的偏置电压。然后增益缩放倍增到64db/v,对于80db的增益变化仅需要1.25v。在这种情况下,如图29所示,增益纹波的幅度也加倍,并且a2的输出处的瞬时snr随着增益的增加而线性减小(参见图30)。
低纹波模式(最小增益误差)
如图28和29所示,输出纹波是周期性的。通过将a1和a2的增益抵消一半的纹波周期或3db,可以使两个放大器的剩余增益误差被抵消。图31显示了以这种方式配置时较低的增益波纹。图32将信噪比绘制为增益的函数;它与并行模式非常相似。
应用
任何高性能放大器的全部潜力只能通过在应用中注意细节来实现。以下几页描述了经过充分测试的电路,其中已经考虑了许多这样的细节。然而,与高精度、高速模拟电路一样,原理图只是故事的一部分;对于AD600/AD602来说,这一点也不差。合理选择电路板的总体布局以及电源去耦元件的类型和位置是非常重要的。如前所述,输入接地A1LO和A2LO必须使用尽可能短的连接。
以下电路展示了超声波和声纳的时间增益控制、增加输出驱动的方法以及使用峰值和均方根检测器进行音频和射频/中频信号处理的agc放大器的示例。这些电路还说明了级联x-amps的方法,用于保持最佳信噪比或最大化用于信号测量的增益控制电压的精度。这些agc电路可以通过移除探测器并用dac或其他电压源代替控制电压,来修改以用作声纳和超声波应用中的压控放大器。
时增益控制与时变
增益(TVG)
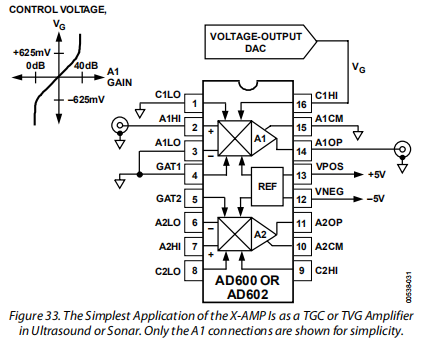
超声波和声纳系统有一个相似的要求:两者都需要在线性控制电压下提供指数级的增益增加,也就是说,增益控制是线性的,单位为分贝。图33显示了AD600/AD602,该AD600/AD602被配置为控制电压斜坡,在-625 mV开始,在+625 mV结束,增益控制范围为40 dB。增益控制电压的极性可以反转,控制电压输入c1hi和c1lo可以反转以达到相同的效果。gaincontrol电压可以由电压输出dac提供,例如ad7244,它包含两个完整的dac,从±5v电源操作,具有+3v的内部基准,并提供±3v的输出摆幅。因此,它非常适合与ad600/ad602一起使用,只需要几个电阻器将dac的输出电压缩放到ad600/ad602所需的电平。
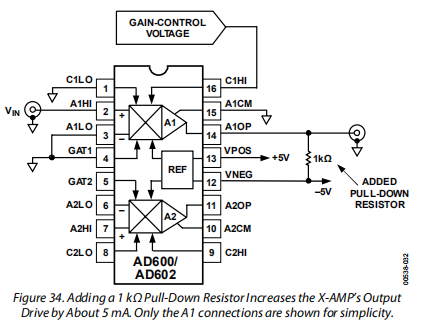
增加输出驱动
AD600/AD602的输出级具有有限的负负载驱动能力。对于小于500Ω的驱动负载,通过将1 kΩ下拉电阻器从输出端连接到负电源,负载驱动可增加约5毫安(见图34)。
驱动电容性负载
对于大于5pF的驱动电容性负载,在输出和负载之间插入一个10Ω电阻。这降低了振荡的可能性。
实现其他增益范围
级联放大器可以适应更大的增益范围。通过级联两个放大器构建的组合包括−20 db到+60 db(使用一个AD602)、–10 db到+70 db(使用AD602的1/2和AD600的1/2),以及0 db到80 db(使用一个AD600)。在多通道应用中,可以通过使用来自不同封装的放大器部分提供额外的防振荡保护。
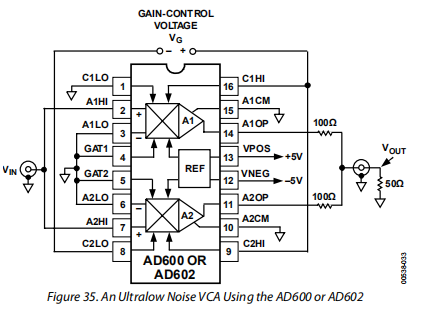
超低噪声VCA
AD600或AD602的两个信道可以并行工作,以实现噪声级的3dB改善,提供1nV/√Hz而不损失增益精度或带宽。
在最简单的情况下,如图35所示,信号输入a1hi和a2hi直接连接在一起。输出a1op和a2op通过r1和r2求和(各100Ω),控制输入c1hi/c2hi和c1lo/c2lo并联工作。使用这些连接,输入和输出电阻均为50Ω。因此,当从50Ω源驱动并在50Ω负载中终止时,增益降低12 db,因此ad600的增益范围变为-12 db到+28 db,ad602的增益范围变为-22 db到+18 db。峰值输入能力不受影响(IC管脚处为1V rms,或空载50Ω电源处为2V rms)。在50Ω负载下,每个输出端的负载实际上是200Ω,因为负载电流在两个通道之间共享,所以在200Ω负载下,整个放大器仍然满足其指定的最大输出和失真水平。该放大器可向负载提供10dbm的最大正弦波功率。
低噪声6db前置放大器
在一些超声波应用中,高输入阻抗需要前置放大器来避免信号衰减通过100Ω输入电阻加载传感器的结果X-AMP的。不能容忍高收益,因为峰值传感器信号通常为±0.5 V,而峰值输入AD600或AD602的性能仅略高于±1 V。2的增益是一个合适的选择。可以证明,如果前置放大器的总体参考输入(RTI)噪声是相同的由于x-amp本身(1.4nv/√hz),输入噪声NX2前置放大器必须是√(3/4)倍大,即,1.2 nV/√赫兹。
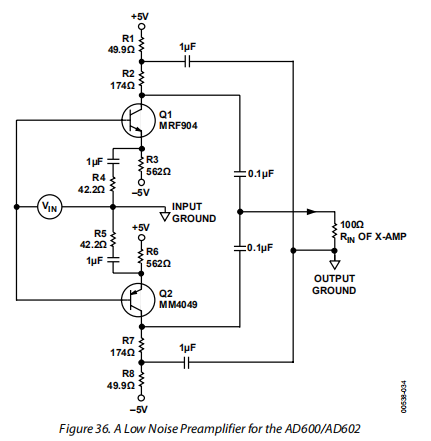
图36显示了一种廉价的电路,使用了为其低R选择的互补晶体管类型。增益由净集电极负载电阻与净发射极电阻之比决定。它是一个开环放大器。增益仅为×2(6db)的100Ω负载,假设由x-amp;r2和r7的输入电阻提供;它们与该负载并联,并且它们的值在定义增益时很重要。对于小信号输入,两个晶体管的跨导相等,发射极电阻r4和r5对信号电平不太敏感。它们在设定收益方面也起着主导作用。
这是AB类放大器。当v向正方向增加时,q1的传导更为剧烈,r变低,而q2增加。反之,v值越负,q2的r值越小,q1的r值越大。所选择的设计使得净发射电阻基本上独立于v的瞬时值,从而导致中等低失真。低电阻值和中等高偏置电流对于实现低噪声、宽带宽和低失真的前置放大器非常重要。重去耦防止电源线上的噪声传输到x-amp的输入端。
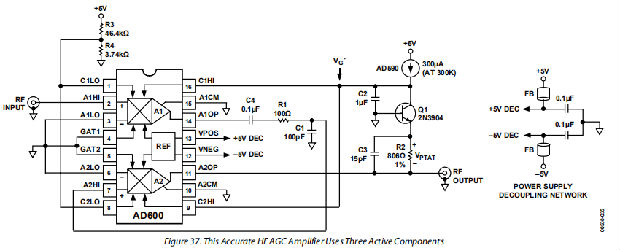
80db增益范围的低噪声agc放大器
图37提供了AD600作为AGC放大器连接的简单性示例。a1和a2级联,100Ω电阻r1引入6db衰减,c1和a2输入的50Ω净电阻形成5ns的时间常数。这具有双重效果:将总增益范围从0分贝降至80分贝至-6分贝至74分贝,并引入一个单极低通滤波器,其-3分贝频率约为32兆赫。这确保了在最大增益下的稳定性,从而略微降低了总带宽。电容器c4在a1的输出端阻断小的直流偏移电压(否则可能在其最大增益下使a2饱和),并在约8khz处引入高通角,有助于消除输入端可能存在的低频噪声和杂散信号。
使用了基于q1和r2的简单半波探测器。进入电容器C2的平均电流是AD590提供的电流(300 K时为300μA,27°C)与Q1的集电极电流之差。反过来,控制电压v是该误差电流的时间积分。当v(因此增益)稳定时,q1中的整流电流平均必须正好平衡ad590中的电流。如果a2的输出太小而不能做到这一点,则v增大,导致增益增加,直到q1足够导通为止。此控制系统的操作如下。
首先,考虑r2为零,输出电压v为方波的特定情况,例如,100 kHz,远高于控制回路的角频率。当v为负时,q1导通。当v为正时,它被切断。由于平均集电极电流被强制为300μA,方波有50%的占空比,导电时的电流必须为600μA。若忽略R2,则V的峰值仅为600μA(通常约为700 mV)或2 V p-p时Q1的V。因此,输出稳定时的振幅具有很强的负温度工作系数(Tc),通常为-1.7 mV/℃。虽然这在某些应用中可能并不麻烦,但r2的正确值使输出随温度稳定。
要了解这一点,首先注意AD590中的电流与绝对温度(PTAT)成正比。实际上,这个集成电路是用作温度计的。目前,假设信号是方波。当q1导电时,v是v的和。v也是ptat电压,可以选择tc等于但与基-发射极电压tc相反。这实际上只不过是薄纱伪装的带隙电压基准原理。当选择r2使其上的电压和q1的v之和接近于约1.2v的带隙电压时,只要q1和ad590共享相同的热环境,v在宽的温度范围内是稳定的。
由于在方波的每半个周期中发射极的平均电流为600μA,833Ω的电阻将在300 K时增加500 mV的PTAT电压,增加1.66 mV/℃。实际上,R2的最佳值取决于使用的晶体管,在较小程度上取决于要优化温度稳定性的波形;对于所示设备和正弦波信号,建议值为806Ω。该电阻器还用于降低Q1中的峰值电流,其与C2形成的200 Hz LP滤波器有助于将V纹波引起的失真降至最低。请注意,正弦波条件下的输出振幅高于方波,因为理想整流器的电流平均值将是0.637倍大,从而导致t输出振幅为1.88伏(=1.2/0.637),或1.33伏均方根。在实践中,有些不理想的整流器导致正弦波输出被调节到约1.275伏均方根。
向反向增益控制输入c1lo和c2lo施加375 mV的偏移。因此,V的标称-625 mV至+625 mV范围向上转换(在V’这可防止Q1在低增益下进入严重饱和,并为AD590在使用5 V电源时在高增益下正确操作留下足够的4 V净空。
实际上,6db级间衰减器意味着agc系统的总增益实际上从-6db运行到+74db。因此,需要2v rms的输入以在最小增益下产生1v rms输出,其超过ad600的1v rms最大输入规范。因此,可用增益范围为0分贝至74分贝(或x1至x5000)。由于增益标度为15.625 mV/dB(由于级联级),V'的最小值实际上增加了6×+15.625 mV,或约94 mV,达到-156 mV,因此降低了Q1中饱和的风险。
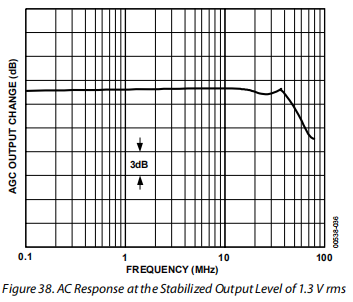
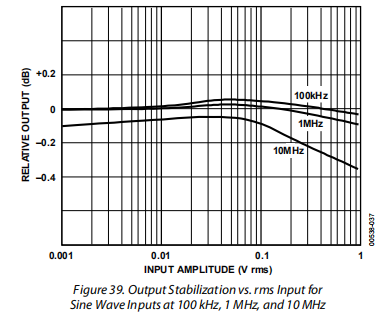
Q1的发射极电路有点感应(由于其有限的F和基极电阻)。因此,r2的有效值随频率增加而增加。这导致高频下的稳定输出振幅增加,但对于C3的添加,实验确定2N3904的最大响应平坦度为15 pf。或者,可以使用更快的晶体管来降低高频峰值。图38显示了稳定输出电平约为1.3 rms时的交流响应。图39显示了100 kHz、1 MHz和10 MHz频率下1 mV至1 V rms正弦波输入的输出稳定性。
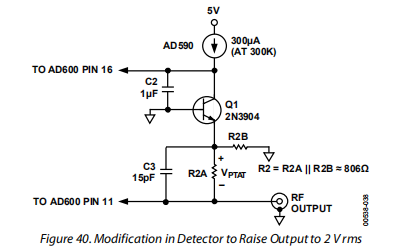
虽然这里使用的带隙原理将输出振幅设置为1.2V(对于方波情况),但稳定点可以设置为任何更高的振幅,直到AD600能够支持的最大输出±(V−2)V。只需将r2分成两个适当比例的分量,其平行和保持在接近806Ω的零tc值。图40显示了这一点以及如何在不改变温度稳定性的情况下提高输出。
宽范围、rms线性db测量系统(带rms检测器的2mhz agc放大器)
单片rms-dc转换器提供了一种廉价的方法来测量任意波形信号的rms值;它们还可以提供低精度对数(分贝标度)输出。但也有一定的不足。第一个是它们的限制动态范围,通常只有50分贝。更麻烦的是,带宽大致与信号电平成比例;例如,ad636为100 mv rms的输入提供900 kHz的3 dB带宽,但对于10 mv rms的输入仅具有100 kHz的带宽。它的对数输出是无缓冲的,未校准的,并且在温度下不稳定。需要大量的支持电路,包括至少两个调整和一个特殊的高tc电阻,以提供有用的输出。
使用ad636作为agc环路中的检测元件可以消除这些问题,在agc环路中,放大器的rms输出和固定直流参考之间的差在环路积分器中为零。信号的动态范围和准确度现在完全取决于agc系统中使用的放大器。由于rms dc变换器的输入被强制为恒定振幅,接近其最大输入能力,因此带宽不再依赖于信号。如果放大器具有指数(线性db)增益控制律,则其控制电压v由agc回路强制具有一般形式:
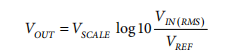
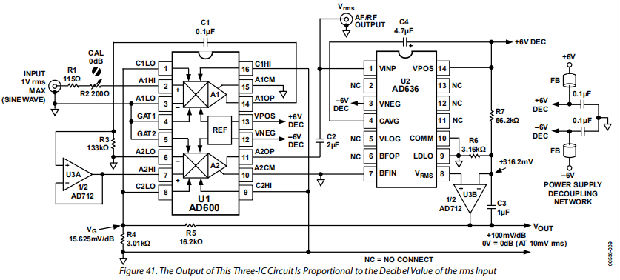
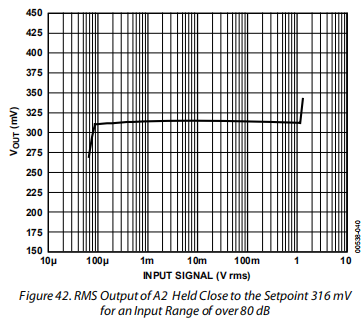
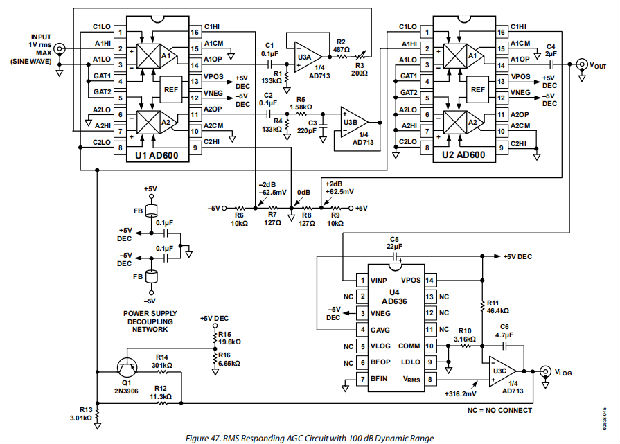
图41显示了使用AD600的实际宽动态范围RMS响应测量系统。注意,该系统的信号输出在A2OP上可用,该电路可用作带RMS响应检测器的宽带AGC放大器。该电路可处理100μv至1v rms的输入,恒定测量带宽为20hz至2mhz,主要受ad636rms转换器的限制。其对数输出是精确校准为每十年100 mV/dB或2 V的可加载电压,这简化了使用DVM时对读数的解释,并且对于100μV rms输入设置为-4 V,对于10 mV输入设置为零,对于1 V rms输入设置为+4 V。根据方程式4,V为10 mV,V为2 V。
注意,±4V的峰值对数输出需要为双运算放大器U3(AD712)使用±6V电源,尽管较低的电源足以满足AD600和AD636的要求。如果只有±5v电源可用,则有必要对v使用减小值(例如1v,在这种情况下,峰值输出将仅为±2v),或将信号的动态范围限制在约60db。
与前一种情况一样,ad600的两个放大器被级联使用。然而,图21中发现的6db衰减器和低通滤波器被单位增益缓冲放大器u3a代替,其4mhz带宽消除了在最高增益下不稳定的风险。缓冲器还允许使用高阻抗耦合网络(c1/r3),该网络在约12hz时引入高通角。一个10分贝(x0.316)的输入衰减器现在由r1+r2提供,与ad600的100Ω输入电阻一起工作。在关键应用中,该调整提供对数截距v的精确校准,但如果不需要非常接近的校准,则r1和r2可以被215Ω的固定电阻代替,因为ad600(以及它和ad636的所有其他关键参数)的输入电阻已经被激光修整以进行精确操作。该衰减器允许接受最大为±4V的输入,即均方根值为1V,峰值因子高达4的信号。
A2的输出通过C2和AD636的6.7KΩ输入电阻形成的另一个12Hz高通滤波器进行交流耦合。均方根直流变换器的平均时间常数由c4确定。将AD636(插脚8)的无缓冲输出与由6 V的正电源电压和电阻器R6和R7设置的316 mV的固定电压进行比较。V与此电压成正比,需要更高校准精度的系统应使用更稳定的电源代替依赖电源的基准。
这些电压的任何差异都由运算放大器u3b积分,时间常数为3ms,由r6/r7和c3的并行和构成。现在,如果AD600的输出太高,V rms大于设定值316 mV,导致U3b的输出,即V-上升(注意积分器是非旋转的)。v的一部分连接到ad600的反向增益控制输入,因此根据需要导致增益减小,直到v rms完全等于316 mv,此时a2的输出处的交流电压被强制正好等于316 mv rms。该部分由R4和R5设置,因此A1和A2的控制电压的15.625 mV变化-这将使级联放大器的增益变化1 dB,要求在V下变化100 mV。注意,由于A2被迫在远低于其容量的输出电平下工作,因此可以通过切断放大器。
为了检查操作,假设输入端施加10 mV rms的输入,由于衰减器中的10 dB损耗,导致A1输入端的电压为3.16 mV rms。如果系统按要求运行,v(因此v)应为0。在这种情况下,a1和a2的增益都是20db,因此ad600的输出比其输入大100倍(40db),其估计为316mv rms,ad636所需的输入来平衡环路。最后,请注意,与大多数需要对内部kt/q标度进行强温度补偿的agc电路不同,这些电压以及该测量系统的输出是温度稳定的,直接由ad600中梯形网络的基本和精确指数衰减引起。
给出了100khz正弦波输入的典型结果。图42显示,在超过80分贝的输入范围内,输出保持在接近316 mV rms的设定值。
当然,该系统可以用作agc放大器,其中输入的均方根值是水平的。图43显示分贝输出电压。更能说明问题的是图44,图44显示,在80μV至500 mV rms的输入范围内,与方程1预测的理想输出的偏差在±0.5 dB范围内,在80μV至800 mV的80 dB范围内,偏差在±1 dB范围内。通过对输入衰减器r1+r2的适当选择,可以将其居中,以覆盖从25 mV到250 mV的低电压到1 mV到10 V的高电压的任何范围,并对V的值进行适当的校正。注意V不受范围变化的影响。在这条曲线中看到的±0.2db的增益纹波是x-amp有限插值误差的结果。注意,它以12分贝的周期出现,是抽头点之间间隔的两倍(因为有两个级联级)。

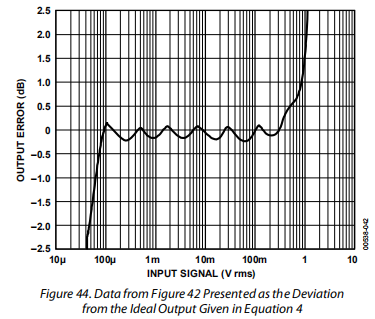
当x-amp级级联时,通过在两对控制电压之间引入3db偏移量,可以消除这种纹波。实现这一点的简单方法如图45所示:c1hi和c2hi处的电压除以±46.875mv或±1.5db。或者,这些管脚中的任何一个可以单独偏移3db,并且在输入衰减器(r1+r2)处进行1.5db增益调整。
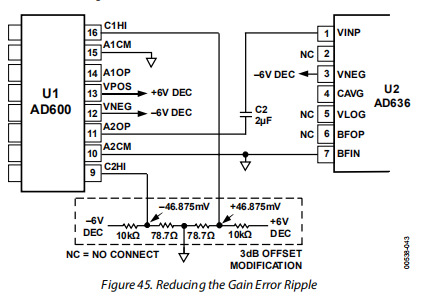
图46所示的误差曲线表明,在范围的中心部分,输出电压可以保持接近理想值。这种修改的惩罚是在范围的末端有更高的误差。接下来的两个应用程序展示了如何将三个放大器部分级联以将标称转换范围扩展到120db,其中包括图37所示类型的简单lp滤波器。很低的误差可以保持在100分贝的范围内。

具有高精度db输出的100db至120db rms响应恒定带宽agc系统
接下来的两个应用程序兼作agc放大器和测量系统。在这两种情况下,精确的增益偏移用于在整个100分贝范围内实现±0.1分贝的高增益线性度或在任何增益下实现最佳信噪比。
最小增益100db rms/agc系统
误差(带偏置的并行增益)
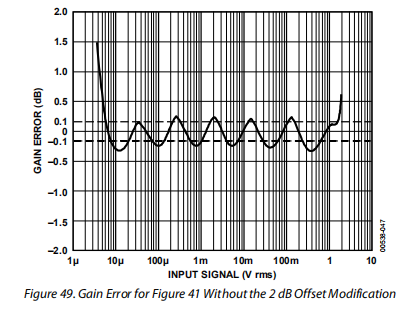
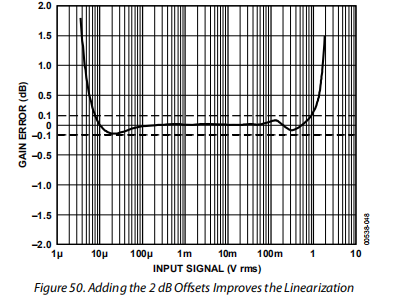
图47显示了一个rms响应的agc电路,它可以和一个精确的测量系统一样使用。它接受10μV至1 V rms(–100 dBV至0 dBV)的输入,并具有足够的超量程。图48显示对数输出,V,精确地标度为每十年1 V,即50 mV/dB,截距(V=0)为3.16 mV rms(–50 dBV)。放大器之间引入了±2db的增益偏移,由r6到r9引入的±62.5mv提供。这些偏移抵消了x-amp中由其有限插值误差引起的小增益波动,该误差在各个vca部分具有18db的周期。图49显示了没有这种偏移的所有三个放大器部分的增益纹波(在这种情况下,增益误差简单相加);在6μv到1.5v rms的108db范围内,它仍然是非常低的±0.25db。然而,在连接增益偏移的情况下,增益线性在指定的100分贝范围内保持在±0.1分贝以下(见图50)。

该电路的最大增益为120db。如果不使用滤波,AD600的噪声谱密度(1.4nV/√Hz)将在全带宽(35MHz)中等于8.28μV rms的输入噪声。当增益为一百万时,输出噪声将占主导地位。因此,一定程度的带宽降低是强制性的,在图47的电路中,这主要是由于单极低通滤波器r5/c3,它提供458khz的-3db频率,在100db的增益下将最坏情况下的输出噪声(at v)降低到约100mv rms。当然,例如,在音频应用中,仅通过增加c3就可以进一步减小带宽(因此也可以减小输出噪声)。为该应用选择的值在最小化小输入信号的v输出误差方面是最优的。
AD600是直流耦合的,但即使在输入端的微小偏置电压也会在高增益下使输出过载;因此,也需要高通滤波。为了提供低频操作,R1/C1和R4/C2提供了约12Hz的两个简单0;运算放大器部分U3A和U3B(AD713)用于提供阻抗缓冲,因为AD600的输入电阻仅为100Ω。12赫兹时的另一个0由C4和AD636 rms转换器的6.7 kΩ输入电阻提供。
V的均方根值在AD636的引脚8处产生;该过程的平均时间由C5确定,并且所示值在20 Hz时导致小于1%的均方根误差。将缓慢变化的v rms与由r10/r11的正电源导出的316mv的固定参考值进行比较。这两个电压之间的任何差异都与输出为V的运算放大器U3C集成在C6中。由R12和R13确定的该电压的一部分返回到所有AD600部分的增益控制输入。电压增加会降低增益,因为该电压与极性反转控制输入相连。
在这种情况下,所有三个vca部分的增益同时变化,因此缩放不是32 db/v,而是96 db/v或10.42 mv/db。因此,将其标度设置为50 mV/dB所需的V分数为10.42/50或0.208。产生的满标度范围V名义上为±2.5 V。该标度允许电路在±5 V电源下工作。
可选地,标度可以改变为100毫伏/分贝,当通过增加r12到25.5 kΩ在dvm上显示v时,这将更容易解释。然后,满标度输出±5 V需要使用至少±7.5 V的电源电压。
r2/r3与ad600的100Ω输入电阻构成16.6±1.25db的简单衰减器。这使得在输入为3.16 mV rms时,分贝输出的参考电平可以精确地设置为0,从而使100分贝范围在10μV和1 V之间居中。在许多应用中,R2/R3可以被590Ω的固定电阻器代替。例如,在agc应用中,对数输出的斜率和截距都不重要。
一些附加组件(r14到r16和q1)提高了信号范围顶端v的精度(即,对于小增益)。当第一个放大器u1a的输入达到0db时,增益开始衰减。为了补偿这种非线性,q1在v~1.5v时开启,并增加对ad600s的控制输入的反馈,因此在v时需要较小的电压,以将ad636的输入保持在316 mv rms的设定值。
具有最佳信噪比的120db rms/agc系统(顺序增益)
在最后一种情况下,所有增益同时调整,导致输出信噪比总是小于最佳值。序贯增益控制的使用使信噪比有了很大的提高,对v的精度只有很小的影响,而对v的稳定精度没有影响。其思想是首先增加早期阶段的增益(随着信号电平的降低),并在整个放大器链中保持最高的信噪比。这可以很容易地实现与AD600,因为它的增益是准确的,即使在控制输入是超速。也就是说,在移到右边的下一个放大器之前,1.25 V的每个增益控制窗口都被充分利用。
图51显示了顺序控制方案的电路。r6到r9与r16在各个放大器之间提供42.14db的偏移,以确保每个连续x-amp的增益之间的平滑过渡,增益增加的顺序为u1a、u1b和u2a。r3+r17提供的可调衰减器和u1a的100Ω输入电阻,以及固定的6db衰减pr通过r2和u1b的输入电阻,将v设置为当V为3.16 mV rms时读取0 dB,并将100 dB范围集中在10μV rms和1 V rms输入之间。R5和C3提供30 kHz的3 dB噪声带宽。r12到r15将控制输入的刻度从625 mV/decade更改为输出的1 V/decade。同时,r12到r15使动态范围居中在60db,这是在u1b的v等于0时发生的。这些安排确保V仍在±6 V电源范围内。
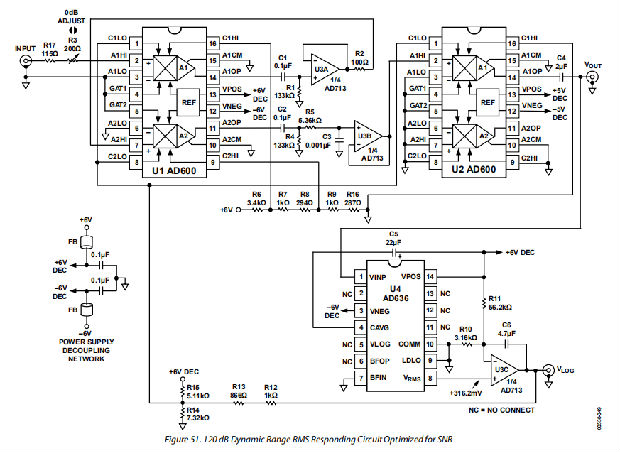
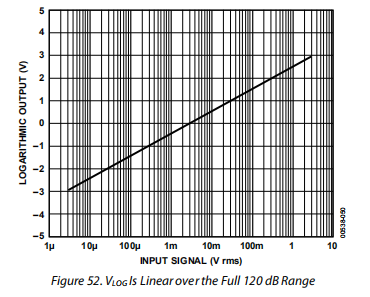
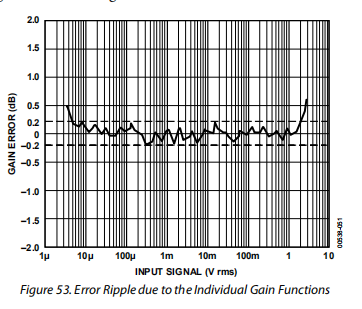
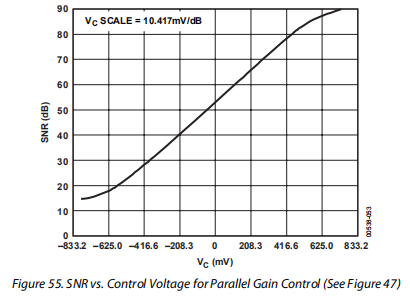
图52显示V在整个120分贝范围内呈线性。图53显示了由6μV到2V范围内的±0.2dB(虚线)限制的单个增益函数引起的误差波动。由于无法完美匹配增益函数而导致的大约200μV和20 mV的小扰动是增益现在是连续的唯一迹象。图54是在整个120分贝范围内保持非常接近其设定值316 mV rms的V曲线图。原木自动增益控制为了更直接地比较同时和顺序操作模式中的snr,消除了所有级间衰减(图47中的r2和r3以及图51中的r2),短路了u1a的输入,选择r5提供20 kHz带宽(r5=7.87 kΩ),并且使用外部源仅改变增益控制。然后在v处测量噪声的rms值,并表示为相对于0 dbv的snr,这几乎是出A600。同步模式的结果如图55所示。随着增益的增加,信噪比均匀下降。请注意,由于使用了反向增益控制,因此该曲线和图56中的增益因增益控制电压的更多正值而减小。
相反,序列模式的信噪比如图56所示。u1a始终作为固定噪声源,其增益的变化对输出噪声没有影响。这是x-amp技术的一个特点。因此,对于控制范围的前40db(实际上稍多一点,如后文所述),当只有这个vca部分的增益变化时,snr保持恒定。在此期间,u1b和u2a的增益在其最小值为-1.07db。

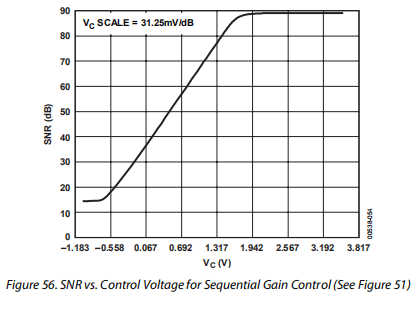
在接下来的40db控制范围内,u1a的增益保持固定在其最大值41.07db,只有u1b的增益变化,而u2a的增益保持在其最小值-1.07db。在此区间内,u1a的固定输出噪声随u1b增益的增大而增大,信噪比逐渐减小。
一旦u1b达到最大增益41.07db,它的输出也成为一个独立于增益的噪声源;这种噪声被呈现给u2a。随着控制电压的进一步增加,u1a和u1b的增益都保持在其最大值41.07db不变,信噪比继续降低。图56清楚地显示了这一点,因为在输入信号开始衰减之前,前40db的最大信噪比为90db。
这种交错增益的安排可以容易地实现,因为当ad600的控制输入被过驱动时,增益限制在其最大值或最小值而没有副作用。这就消除了以前用于分解多级agc放大器增益范围的笨拙非线性成形电路的需要。AD600的最大和最小增益的精确值(不是0分贝和+40分贝,而是-1.07分贝和+41.07分贝)解释了使用的偏移值的相当奇怪的值。
输出信噪比的优化在agc系统中具有明显的应用价值。然而,在考虑这些电路的宽范围对数测量能力的应用中,在高增益下,信噪比不可避免地降低。不必严重损害它们的效用。事实上,图47所示电路的带宽是通过改变低信号电平下的对数误差曲线形状来提高测量精度的(见图53)。
