特点:±2 A,50 V连续输出额定值;低rds(开)输出(270 mΩ,典型);可编程混合、快速和慢速电流衰减模式;串行接口控制芯片功能;低功耗同步整流;内部uvlo和热关机电路;交叉电流保护。
描述
设计用于直流电机的脉宽调制(PWM)电流控制,A358能够连续输出电流±2 A和工作电压为50 V。内部固定关断时间PWM电流控制时序电路可以通过串行接口编程,以慢速、快速和混合电流衰减模式运行。
提供相位和使能输入端子,用于利用外部应用的pwm控制信号控制直流电动机的速度和方向。使能输入可以通过串行端口编程成快速或慢速电流衰减的PWM桥。提供内部同步整流控制电路,以减少在脉宽调制操作期间的功耗。内部电路保护包括滞后热关机和交叉电流保护。不需要特殊的通电顺序。
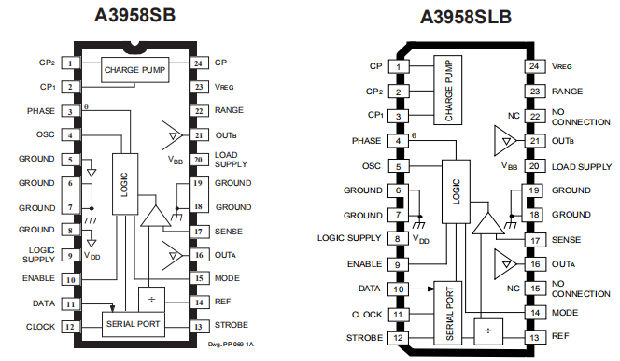
A3958有两种电源包可供选择,一种是24针塑料蘸料,带有外露的热凸耳(封装后缀“B”),另一种是24针SOIC,带有内部保险丝(封装后缀“LB”)。在这两种情况下,电源插脚都处于接地电位,不需要电气隔离。每种包装类型不含铅,100%哑光锡引线框架。
选择指南包装箱零件号:A3958SB-T*24针浸渍,每管15个热凸耳;A3958SLBTR-T 24针SOICW,每卷1000个内部保险丝插脚。
串行接口。
A3958由3线控制(时钟、数据、频闪)串行端口。可编程功能允许最大限度地将脉宽调制配置为电机驱动要求。串行数据从D19开始计时。
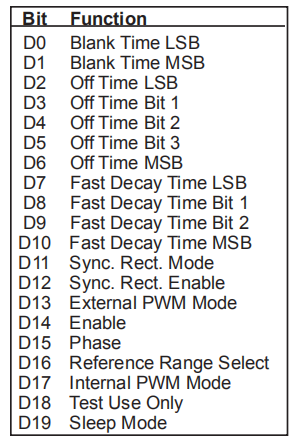
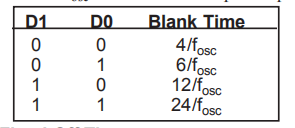
d0–d1空白时间。根据下表,当任何输出驱动器打开时,电流感应比较器被屏蔽。fosc是振荡器的输入频率。
D2–D6固定关闭时间。fi ve位字设置内部pwm电流控制的fi xedoff时间。休息时间被:

式中n=0…31
例如,当振荡器频率为4mhz时,关断时间可从1.75μs调整到63.75μs,增量为2μs。
d7–d10快速衰减时间。一个四位字设置内部pwm控制电路固定关闭时间的快速衰减部分。只有当选择了混合衰减模式(通过位d17和模式输入端子)时,这才有影响。对于tfd>toff,器件将在快衰减模式下有效工作。快衰变部分被:

式中n=0…15
例如,当振荡器频率为4mhz时,快速衰减时间可从1.75μs调整到31.75μs,增量为2μs。
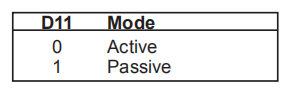
D11同步整流模式。当检测到零电流水平时,激活模式通过关闭同步整流防止负载电流反转。被动模式允许电流反向,但如果负载电流反向上升到VREF/RS设置的电流限制,则将关闭同步整流器电路。
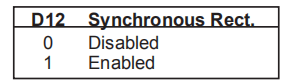
D12同步整流启用。
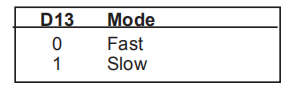
D13外部脉冲宽度调制衰减模式。位d13在使用外部pwm电流控制的启用斩波时确定电流衰减模式。
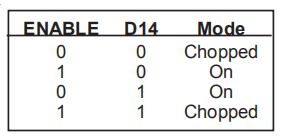
D14启用逻辑。位D14,与ENABLE,确定输出驱动程序是否处于斩波(关)(ENABLE=D14)或开启(ENABLE≠D14)状态。
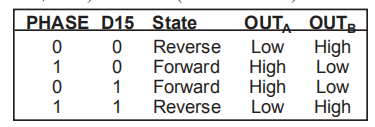
D15相位逻辑。位d15与phase结合,确定设备是在正向(phase≠d15)还是反向(phase=d15)状态下工作。
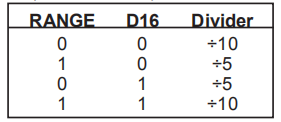
D16 GM范围选择。位D16,与范围,确定VREF是除以5(范围≠D16)还是除以10(范围=D16)。
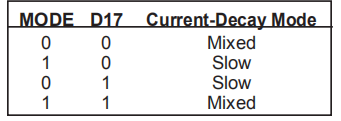
D17内部脉宽调制模式。位D17,与模式,选择慢速(模式≠D17)或混合(模式=D17)电流衰减。
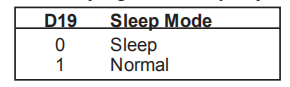
D18测试模式。D19睡眠模式。位d18低(默认)在正常模式下操作设备。D18仅用于测试目的。用户不应更改此位。位d19选择睡眠模式以在不使用时最小化功耗。这会使包括调节器和电荷泵在内的大部分内部电路失效。通电时,串行端口初始化为所有0。在尝试启用任何输出驱动程序之前,应将D19位编程为高电平1 ms。
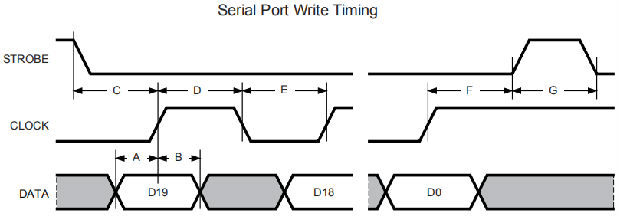
串行端口写入定时操作。数据被记录到时钟信号上升沿的移位寄存器中。通常情况下,选通将保持在高电平,只有在启动写入循环时才会降低。有关最低计时要求,请参阅下图和这些规范。
a、数据设置时间…………15纳秒
b、数据保持时间…………10纳秒
c、设置闪光灯至时钟上升沿…………50 纳秒
d、时钟高脉冲宽度…………50 纳秒
e、时钟低脉冲宽度…………50 纳秒
f、设置时钟上升沿至选通……50纳秒
g、选通脉冲宽度……50纳秒
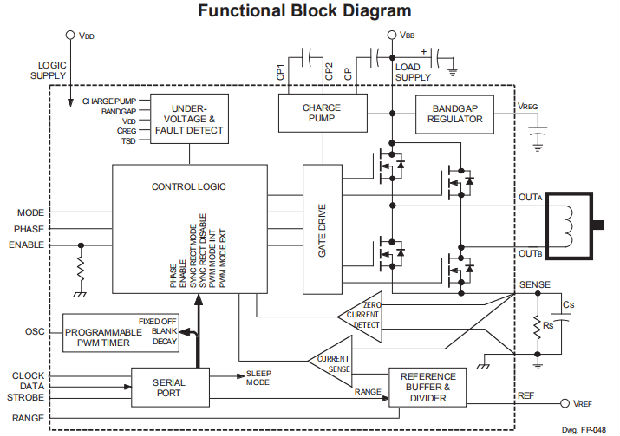
这个内部产生的电压用于操作接收器侧DMOS输出。VREG端子应与0.22μF电容器分离接地。
功能说明:
内部监控,在故障情况下,设备输出被禁用。电荷泵用于产生大于vbb的栅极电源电压来驱动源端dmos栅极。CP1和CP2之间应连接一个0.22μF陶瓷电容器,用于泵送目的。0.22μf陶瓷电容器应连接在电荷泵。
CP和VBB作为储液罐来操作高端DMOS设备。CP电压由内部监控,在故障情况下,设备的源输出被禁用。
停机。如果发生故障(结温过高,或CP或VREG上电压过低),设备的输出将被禁用,直到故障条件消除。通电时,如果VDD较低,则UVLO电路禁用驱动器并将串行端口中的数据重置为全零。
脉冲宽度调制定时器功能。脉冲宽度调制定时器
通过串行端口(位D2–D10)可编程,以向控制电路提供关断时间脉冲宽度调制信号。在混合电流衰减模式中,关闭时间的第一部分在快速衰减中工作,直到达到快速衰减时间计数(串行位d7–d10),然后在关闭时间段的其余部分(位d2–d6)缓慢衰减。如果快速衰减时间设置得比关闭时间长,则该设备有效地在快速衰减模式下工作。结合模式,位d17选择混合衰减或慢衰减。当源驱动器打开时,由于钳位二极管的反向恢复电流和/或与负载中的分布电容有关的开关瞬态而发生电流尖峰。为了防止该电流尖峰错误地复位源使能锁存器,感测比较器被屏蔽。空白定时器在关闭时间计数器之后运行(见位D2-D6)以提供可编程消隐功能。当定时器被斩波或相位改变时,空白定时器复位。对于外部脉宽调制控制,相位变化或启用将触发消隐功能。脉冲宽度调制空白定时器。
同步整流。当通过ENABLE CHOP命令或内部固定关闭时间周期触发一个脉冲宽度调制关闭周期时,负载电流将根据控制逻辑选择的衰减模式再循环。A3958同步整流功能将在电流衰减期间打开相反的一对DMO输出,并使用低rds(开)驱动器有效地短路体二极管。这将显著地降低功耗,并且可以消除对外部肖特基二极管的需要。
同步整流可以在有源模式、无源模式、或通过串行端口(比特D11和D12)禁用。
在慢行模式下,主动或被动模式选择没有影响。启用同步整流后,慢衰减模式可作为有效的制动模式。负载电流由内部固定关闭时间的pwm控制电路调节。当DMOS H桥的输出接通时,电机绕组中的电流增加,直到达到由外部感测电阻器(RS)、施加的模拟参考电压(VREF)、范围逻辑电平和串行数据位D16确定的跳闸值:
当范围=D16时…………ITRIP=VREF/10RS
当范围≠D16时…………ITRIP=VREF/5RS
在触发点,检测比较器重置sourceenable锁存器,关闭源驱动程序。然后,负载电感使电流在串行端口编程设定的关闭时间段内循环。再循环期间的电流路径由慢/混合电流衰减模式(d17)和同步整流控制位(d11和d12)的配置确定。
应用程序信息:
电流感应:为了最大限度地减小由接地跟踪红外下降引起的对ITRIP电流水平的不精确感测,感测电阻器应具有到设备接地端子的独立接地回路。对于低值感电阻,在PCB感测电阻器的踪迹中的IR滴度可以是显著的,并且应该考虑在内。应避免使用插座,因为它们可能由于接触电阻而引入RS的变化。
制动:rs的最大值为rs≤0.5/itrip。制动功能通过串行端口位D13以慢衰减模式驱动设备,通过位D12启用同步整流,并通过D14和启用输入端子的组合进行斩波来实现。由于可以通过DMOS驱动器在任何方向驱动电流,只要断言启用斩波模式,这种配置就可以有效地使电机产生的BEMF短路。需要注意的是,内部的pwm电流控制电路在制动时不会限制电流,因为电流不会流过感测电阻器。最大制动电流可近似为VBEMF/RL。
热保护:应注意确保在高速和高惯性负载的最坏制动情况下不会超过设备的最大额定值。通常,当结温达到165°C时,电路会关闭所有驱动器。其目的仅在于保护装置不受过度连接温度导致的故障影响,不应意味着允许输出短路。热停堆具有大约15°C的滞后。
布局:印刷线路板应使用重型接地板。为了获得最佳的电气和热性能*,驱动器应直接焊接到电路板上。RS的接地侧应具有通向设备接地端子的单独路径。此路径在物理上应尽可能短,并且不应连接任何其他组件。建议在传感器和接地之间放置一个0.1μf的电容器,尽可能靠近设备;负载电源端子vbb应与放置在尽可能靠近设备的电解电容器(建议大于47μf)分离。