3d点击型号即可查看芯片规格书
vr点击型号即可查看芯片规格书
1.1 研发背景: 随着汽车工业及计算机视觉技术的发展,为了提高驾驶的安全系数,越来越多的技术被应用到汽车电子领域,传统的倒车影像系统只能覆盖车尾周围有限区域,而车辆的两侧及车头的盲区无疑增加了安全驾驶的隐患,在狭隘拥堵的路段及复杂的停车环境容易引发碰撞、刮擦等交通意外,甚至因为驾驶员视觉盲区导致后轮将儿童卷入车底等严重的驾驶安全事故,因此360高清3D全景无缝拼接系统应运而生。
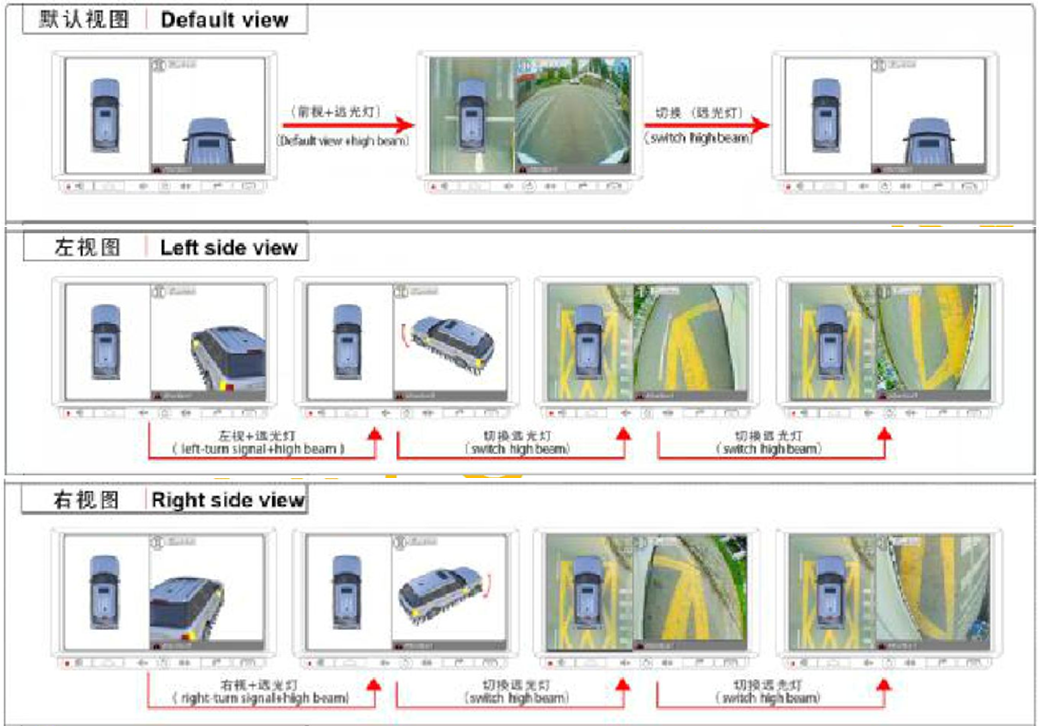
1.2 功能简介: 本系统需要在车身周围安装四个720p的高清摄像头,通过系统主机自动合成完整的鸟瞰图。同 时本系统基于3D VR虚拟摄像机投影技术,可根据车辆运行状态智能切换显示相应的视觉盲区影像,为车主准确呈现周边真实环境以及路况信息。
1.3 应用环境: 当驾驶员需要倒车入库、侧方位停车或者在狭窄复杂路况行车时,本360全景系统不仅能够最大程度帮助驾驶员减少视觉盲区,提高泊车行车驾驶安全,同时,本系统亦内置高清全景行车记录仪功能,可以帮助车主实时记录行车影像,在遭遇碰瓷或者恶意碰撞事故等关键时刻,本系统可为车主提供有利证据,还原事实真相,保护车主合法权益。


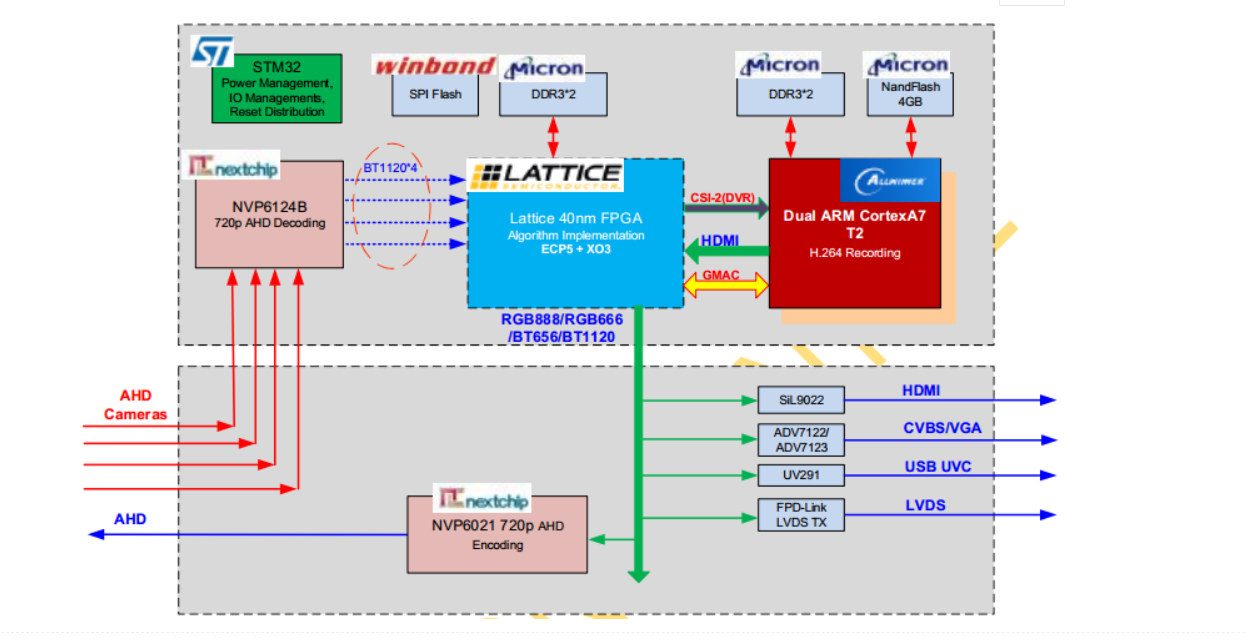
本系统采用世界领先的ARM+FPGA硬件架构, 也就是业内领先的通用ARMCPU+专用GPU的硬件架构。 由于3D-VR图像处理涉及十分复杂的3D建模及庞大繁冗的投影运算, 独立的ARM系统无法承担如此密集的运算任务,在本系统中,ARM系统主要用来实现桶形畸变矫正规划,3D建模规划及3D投影规划,FPGA作为专用的GPU引擎,主要负责具体的3D投影运算及影像处理。此外,ARM系统内置的DSP,用于影像压缩及流媒体影像记录功能。 系统开机后,ARM系统首先为FPGA设定三维数据库规划表及3D投影规则表,外部四个摄像头首先通过NVP6124B进行模数转换及亮度/色差分离,再通过两个交织的BT1120接口送给FPGA,FPGA将BT1120的视频数据解交织后, 存入FPGA对应的DDR3显存区域, 之后据ARM处理器设定的规则进行桶形畸变矫正,3D建模及投影拼接,及后续车模视角适配等,并在整个过程中统计四个摄像头的亮度差异并完成自动亮度均衡,使四个摄像头的图像无缝融合为一体。 FPGA完成ARM规划的所有3D图像运算指令后, 输出1路CSI接口的高清图像到ARM系统, 分辨率1080p,以完成行车DVR功能,供ARM系统进行H.264压缩并写入到系统的存储介质(TF卡或者U盘)。 本系统的ARM处理器使用全志车用级别芯片T2, FPGA则采用美国Lattice半导体40nm超低功耗ECP5,该芯片由于全部采用定制的硬件并行图像处理技术,其拥有业内首屈一指的3D图像运算速度,拥有竞争对手无法企及的低功耗特性。 总之来说,就是相对同行及之前版本来说拥有更高的性能,更低的功耗尤其是更快的开机及反应速度。
1. 功耗:360全景模式+4录视频录像:300mA 睡眠模式情况低于10mA 2. 磁盘容量:支持32G U盘或TF卡 3. 环境温度:-40度到85度 4. 电压容差:9v-36v 5. 视频分辨率:1440*960P@30FPS 6. 重力感应:BN250E 7. 唤起:左右转向灯,远光灯,倒车灯,双闪,按键等 8. 支持安装车型:私家车及低于18米以内的非拖车式商用车
原文作者:江河湖海
