ADS1120点击型号即可查看芯片规格书
特征
•低电流消耗:占空比模式下低至120μA(典型值)
•宽电源范围:2.3伏至5.5伏
•可编程增益:1 V/V至128 V/V
•可编程数据速率:高达2 kSPS
•20 SPS时16位无噪声分辨率
•同时抑制50Hz和60Hz,20个单周期数字滤波器
•双匹配可编程电流源:50μA至1500μA
•内部2.048-V参考:5 ppm/°C(典型)漂移
•内部2%精度振荡器
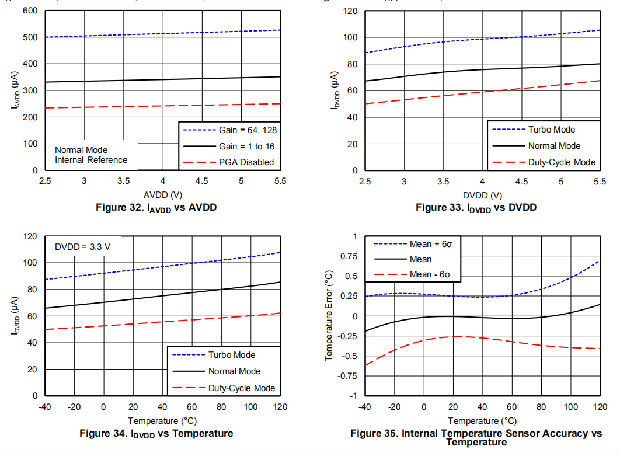
•内部温度传感器:0.5°C(典型值)精度
•两个差分或四个单端输入
•SPI™-兼容接口
•包装:3,5-mm×3,5-mm×0,9-mm QFN
应用
•温度传感器:
–热电偶式温度计
–电阻式温度检测器(RTD)2线、3线或4线类型
•电桥传感器
•便携式仪器
•工厂自动化和过程控制
说明
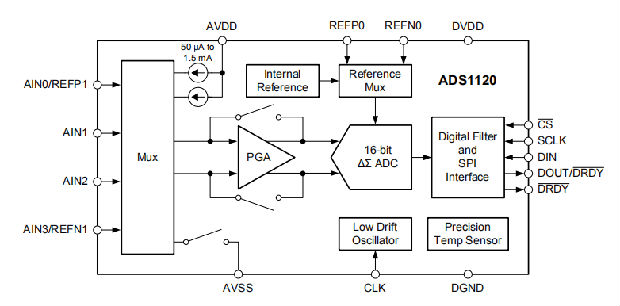
ADS1120是一种精密的16位模数转换器(ADC),它提供了许多集成功能,以降低系统成本和测量小传感器信号的应用中的组件数量。该器件具有两个差分或四个单端输入,通过一个灵活的输入多路复用器(mux)、一个低噪声、可编程增益放大器(PGA)、两个可编程励磁电流源、一个基准电压源、一个振荡器、一个低压侧开关和一个精密温度传感器。
该设备可在单周期沉降的情况下以每秒2000个样本(SPS)的数据速率进行转换。在20 SPS,数字滤波器提供同时50赫兹和60赫兹的抑制噪声的工业应用。内部PGA提供高达128 V/V的增益。这种PGA使ADS1120非常适合测量小传感器信号的应用,例如电阻温度检测器(RTD)、热电偶、热敏电阻和电桥传感器。当使用PGA时,该设备支持伪差分或全差分信号的测量。或者,该器件可以被配置为在提供高输入阻抗的同时绕过内部PGA,并获得高达4v/V的增益,允许单端测量。
在禁用PGA的占空比模式下工作时,功耗低至120μA。通过模式1 SPI兼容接口建立与设备的通信。ADS1120采用无铅QFN-16或TSSOP-16封装,其温度范围为-40°C至+125°C。
订购信息
有关最新的软件包和订购信息,请参阅本文档末尾的软件包选项附录。
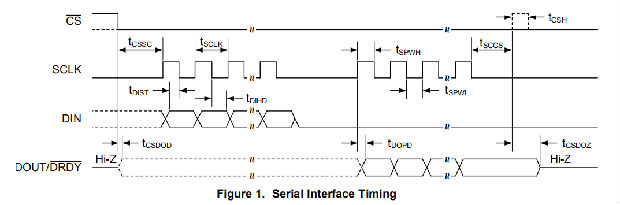
SPI时序特性
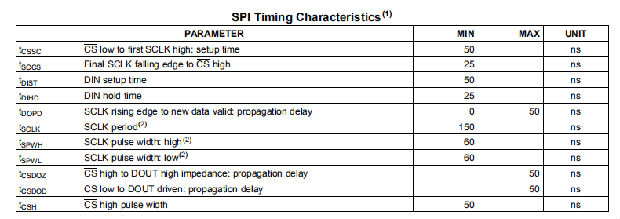
(1) 、在TA=–40°C到+125°C,DVDD=2.3 V到5.5 V,双负载=20 pF | 10 kΩ到DGND,除非另有说明。
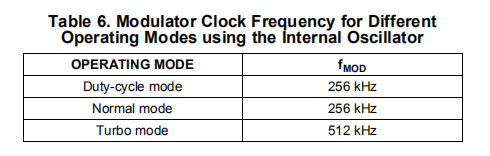
(2) 、如果在13955·tMOD(正常模式,占空比模式)或27910·tMOD(涡轮模式)内没有发送完整的命令,串行接口复位,下一个SCLK脉冲开始新的通信循环。tMOD=1/fMOD。使用内部振荡器或外部4.096-MHz时钟时,调制器频率(fMOD)在正常和占空比模式下为256 kHz,在turbo模式下为512 kHz。
典型特征
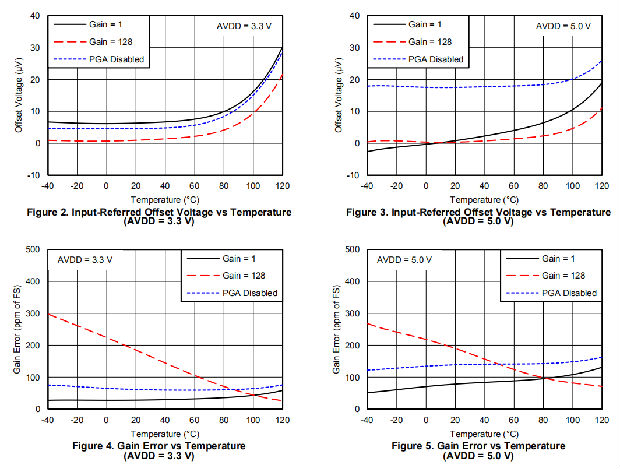
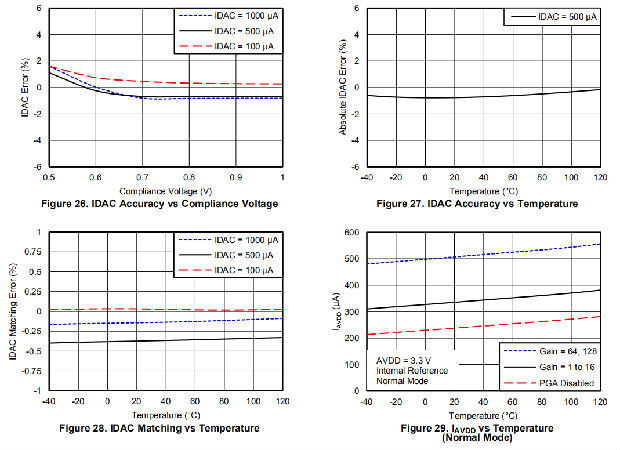
在TA=+25°C,AVDD=3.3 V,AVSS=0 V,使用外部VREF=2.5 V启用PGA,除非另有说明。
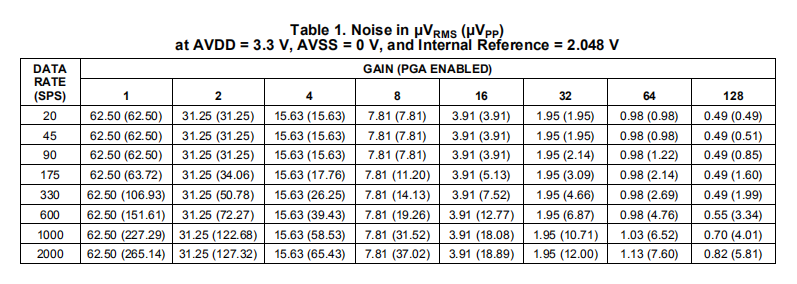
噪声性能
Delta-sigma(Δ∑)模数转换器(adc)基于过采样原理。Δ∑ADC的输入信号以高频(调制器频率)采样,然后在数字域中滤波和抽取,以在相应的输出数据速率下产生转换结果。调制器频率与输出数据速率之比称为过采样比(OSR)。通过提高OSR,从而降低输出数据速率,可以优化ADC的噪声性能。换句话说,当降低输出数据速率时,输入端的噪声降低,因为内部调制器的更多样本被平均以产生一个转换结果。增加增益还可以减少输入参考噪声,这在测量低电平信号时特别有用。
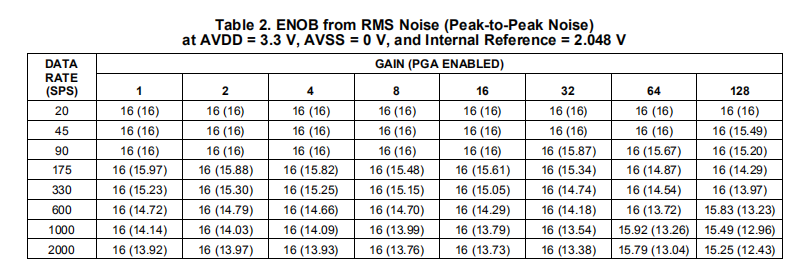
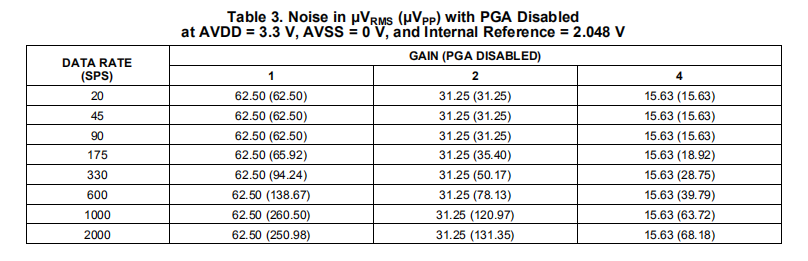
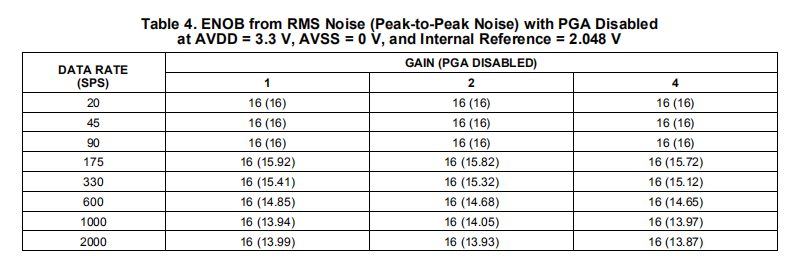
表1至表4总结了设备噪声性能。使用内部2.048-V基准,数据代表TA=+25°C时的典型噪声性能。显示的数据是单个设备在大约0.75秒的时间内平均读数的结果,并在输入端内部短路的情况下进行测量。表1和表3列出了所示条件下的输入参考噪声(单位:μVRMS)。请注意,括号中显示了μVPP值。表2和表4列出了使用等式1从μVRMS值计算的有效位数(ENOB)中的相应数据。注意,从峰值到峰值噪声值计算的无噪声位显示在括号中。
输入参考噪声(表1和表3)仅在使用外部低噪声基准(如REF5020)时发生微小变化。当使用2.048 V以外的参考电压时,要计算ENOB数和无噪声位,请使用方程式1至方程式3:
ENOB=ln(满标度范围/VRMS噪声)/ln(2)
无噪声位=ln(满标度范围/VPP噪声)/ln(2)
满标度范围=2·VREF/增益
概述
ADS1120是一款小型、低功耗、16位Δ∑ADC,它提供了许多集成功能,在测量小型传感器信号的应用中,可降低系统成本和组件数量。
除了Δ∑ADC核心和单周期稳定数字滤波器外,该器件还提供低噪声、高输入阻抗、可编程增益放大器(PGA)、内部基准电压源和时钟振荡器。该装置还集成了一个高度线性和精确的温度传感器,以及两个匹配的可编程电流源(IDACs)用于传感器励磁。所有这些特性都旨在减少典型传感器应用中所需的外部电路,并提高整体系统性能。一个附加的低压侧电源开关简化了低功耗桥式传感器应用的设计。该设备通过四个寄存器完全配置,并通过模式1 SPI兼容接口由6个命令控制。图37显示了设备的功能框图。
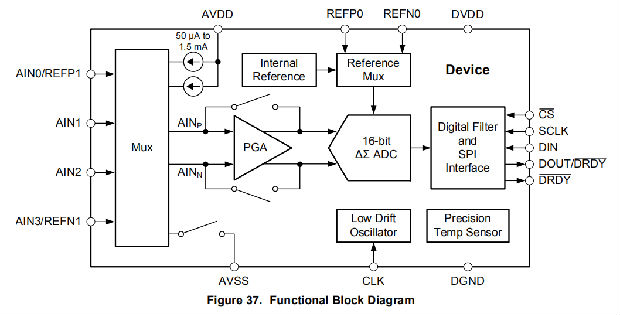
ads1120adc测量一个差分信号VIN,它是节点AINP和AINN之间的电压差。变换器核心由一个差分开关电容器、Δ∑调制器和数字滤波器组成。数字滤波器从调制器接收高速比特流并输出与输入电压成比例的代码。这种结构在任何共模信号中都会产生非常强的衰减。
该设备有两种可用的转换模式:单发和连续转换模式。在单次触发模式下,ADC根据请求对输入信号执行一次转换,并将该值存储在内部数据缓冲区中。然后设备进入低功耗状态以节省电力。单次启动模式旨在为只需要定期转换的系统提供显著的节能效果,或者在转换之间有很长的空闲时间。在连续转换模式下,一旦上一次转换完成,ADC就会自动开始输入信号的转换。新数据以编程的数据速率可用。可以在任何时候读取数据,而不必担心数据损坏,并且始终反映最近完成的转换。
多路复用器
该设备包含一个非常灵活的输入多路复用器,如图38所示。可以测量四个单端信号、两个差分信号或两个单端信号和一个差分信号的组合。多路复用器由配置寄存器中的四位(MUX[3:0])配置。当测量单端信号时,负ADC输入(AINN)通过多路复用器内部的开关连接到AVS。出于系统监控目的,可选择模拟电源(AVDD–AVSS)/4或当前选择的外部参考电压(VREFPx–VREFNx)/4作为ADC的输入。多路复用器还可以将两个可编程电流源中的任何一个路由到任何模拟输入(AINx)或任何专用参考引脚(REFP0、REFN0)。
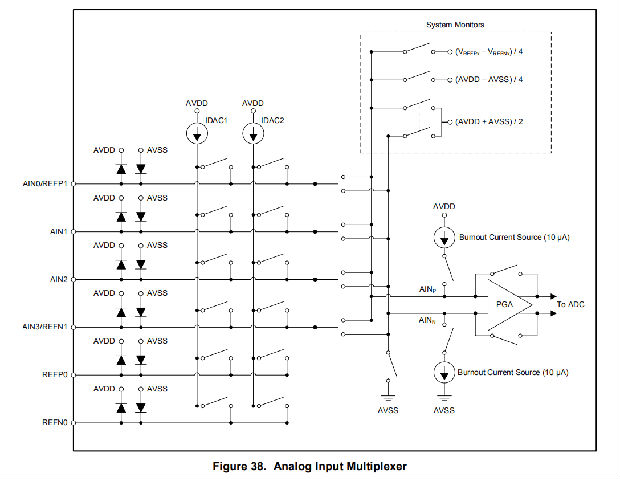
至AVDD和AVSS的静电放电(ESD)二极管保护输入。为防止ESD二极管开启,任何输入端的绝对电压必须保持在等式4的范围内:

如果输入引脚上的电压有可能违反这些条件,则可能需要外部肖特基箝位二极管或串联电阻器将输入电流限制在安全值内(见绝对最大额定值表)。过度驱动设备上未使用的输入可能会影响其他输入引脚上发生的转换。如果在未使用的输入上可能有任何过驱动,TI建议用外部肖特基二极管钳制信号。
低噪声PGA
该器件具有低噪声、低漂移、高输入阻抗、可编程增益放大器(PGA)。PGA可设置为增益1、2、4、8、16、32、64或128。配置寄存器中的三位(增益[2:0])用于配置增益。PGA的简化图如图39所示。PGA由两个斩波稳定放大器(A1和A2)和一个设置PGA增益的电阻反馈网络组成。PGA输入配有电磁干扰(EMI)滤波器。
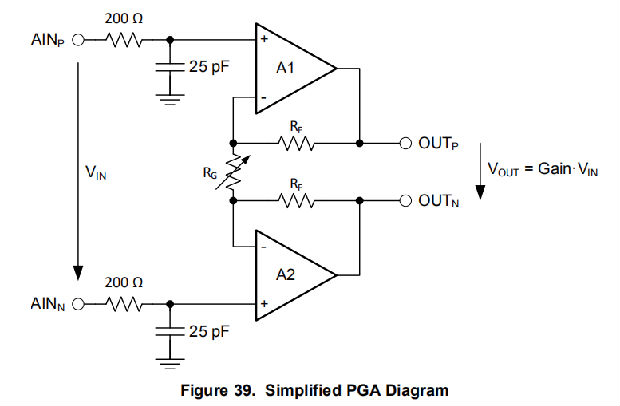
VIN表示差分输入电压VIN=(VAINP–VAINN)。PGA的增益可通过方程式5计算:

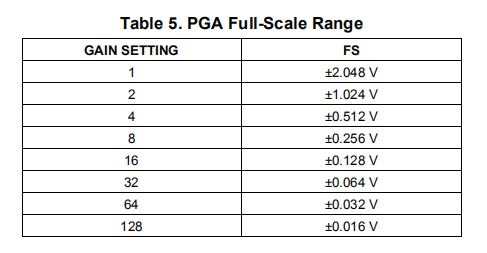
增益通过切换RG的不同值来改变。PGA的差动满标度(FS)输入电压范围由增益设置和使用的参考电压定义,如等式6所示:

表5显示了使用内部2.048-V基准时相应的满标度范围。
为了保持在PGA的线性工作范围内,输入信号必须满足本节讨论的某些要求。
图39中两个放大器(A1和A2)的输出不能摆动到距离电源(AVSS和AVDD)200 mV以上的位置。如果输出端输出端和输出端驱动端离模拟电源轨的距离小于200毫伏,放大器就会饱和,从而变得非线性。此条件意味着输出电压必须满足方程式7:

为了推导输出端(OUP和OUTN)的电压方程,将图39水平分割在中间是一种方便的方法。因为PGA是对称设计,所以可以完成这种分离。因此,增益设定电阻器(RG)必须除以2,并且水平切割点处的所有电压必须参考共模电压(VCM),如图40所示。

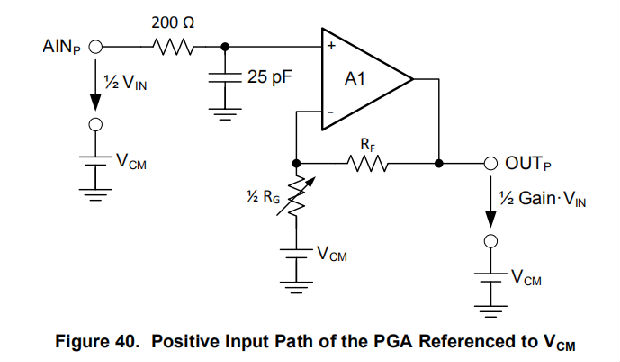
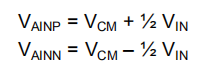
PGA输入端(AINP和AINN)的电压可表示为方程式9和方程式10:
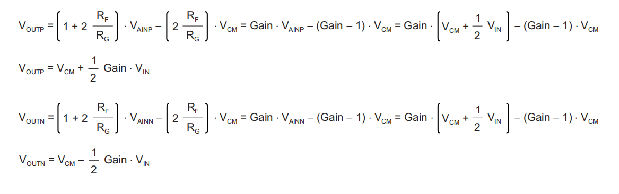
输出电压(VOUTP和VOUTN)可按式11和式12计算:
对于放大器A1和A2的输出电压的要求(方程式7)也可以使用方程式11和方程式12转换为输入共模电压范围的要求,方程式13和方程式14给出了这些要求:

为了计算最小和最大共模电压限值,必须使用应用中出现的最大差分输入电压(VIN(MAX)),这不一定是可能的FS范围。
由于PGA的具体设计实现,最小VCM也必须满足方程式15。

注意
共模电压要求如下:
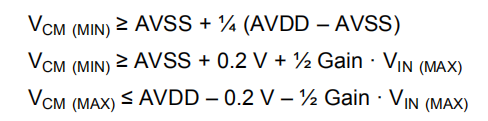
图41和图42显示了AVDD=3.3 V和AVSS=0 V(增益=1和增益=16)的共模电压限值的图形表示。

下面的讨论解释了如何将方程式13至方程式15应用于假设应用。本例的设置为AVDD=3.3 V,AVSS=0 V,增益=16,使用外部参考,VREF=2.5 V。然后,可以应用的最大可能差分输入电压VIN=(VAINP–VAINN)被限制在FS=±2.5 V/16=±0.156 V的满标度范围内。因此,方程式13至方程式15得出允许的VCM范围为1.45 V≤VCM≤1.85 V。
例如,如果连接到该假设应用中的输入的传感器信号没有利用整个满标度范围,而是被限制在VIN(MAX)=±0.1 V的范围内,则减小的输入信号振幅将VCM限制放宽至1.0 V≤VCM≤2.3 V。
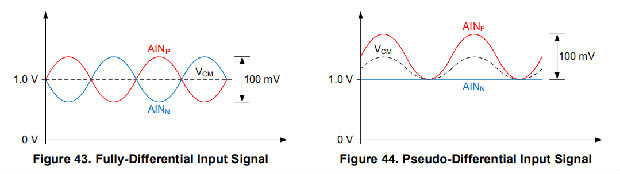
在全差分传感器信号的情况下,每个输入(AINP,AINN)可在共模电压(VAINP+VAINN)/2附近摆动至±50 mV,该电压必须保持在1.0 V和2.3 V之间。对称惠斯通电桥的输出是全差分信号的一个例子。
相比之下,电阻式温度检测器的信号具有伪差分性质(如RTD测量部分所示执行),其中负输入保持在0 V以外的恒定电压,只有正输入端的电压发生变化。当必须测量伪差分信号时,本例中的负输入必须偏置在0.95 V和2.25 V之间的电压。然后,正输入可以在负输入上摆动到VIN(MAX)=100 mV。注意,在这种情况下,共模电压的变化与正输入电压的变化同时发生。也就是说,当输入信号在0v≤VIN≤VIN(MAX)之间波动时,共模电压在VAINN≤VCM≤VAINN+½VIN(MAX)之间波动。满足最大输入电压VIN(MAX)的共模电压要求,确保在整个信号范围内满足要求。
图43和图44分别示出了全差分和伪差分信号的示例。
绕过PGA
在增益为1、2和4时,设备可配置为禁用和绕过低噪声PGA。禁用PGA可降低总功耗,同时也消除了等式13至方程15对共模输入电压范围VCM的限制。当PGA被禁用时,可用的绝对和共模输入电压范围为(AVSS–0.1 V≤VAINx,VCM≤AVDD+0.1 V)。为了测量参考AVSS的单端信号(AINP=VIN,AINN=AVSS),必须绕过PGA。
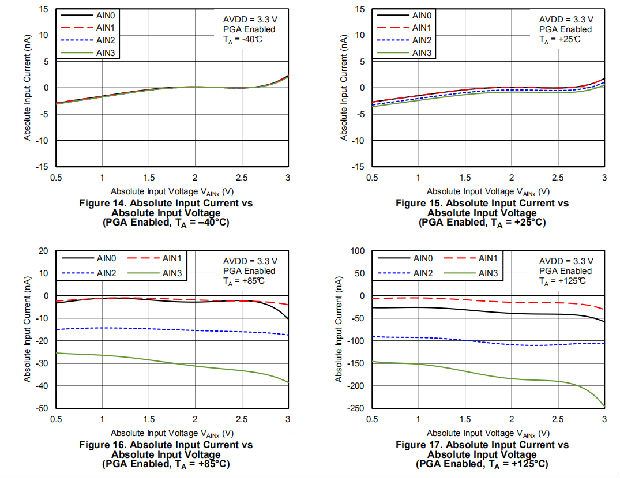
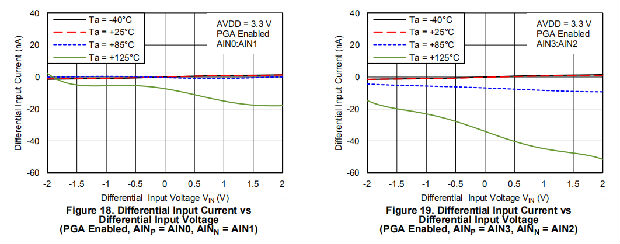
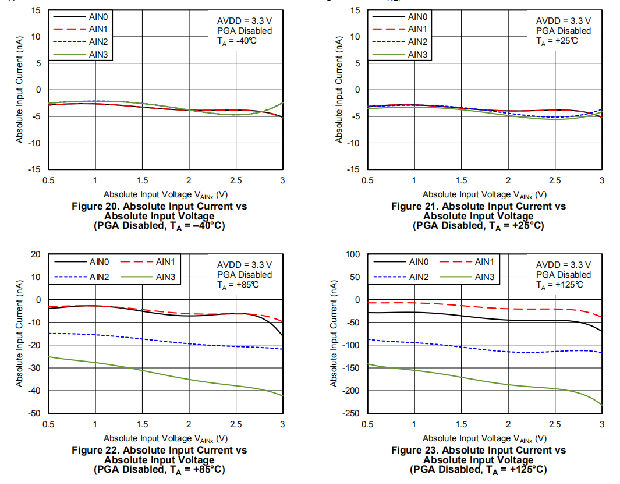
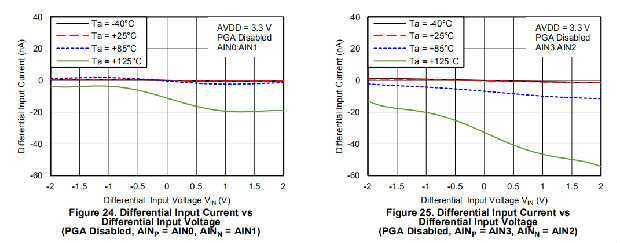
当通过在配置寄存器中设置PGA_旁路位来禁用PGA时,设备使用缓冲开关电容器级来获得增益1、2和4。开关电容器级前面的内部缓冲器确保电容器充放电对输入负载的影响最小。当PGA被禁用时,绝对输入电流(流入或流出每个输入的电流)和差动输入电流(正负输入之间的绝对电流差)的典型值,请参考图20至图25。
对于输出阻抗高的信号源,外部缓冲仍然是必要的。请注意,有源缓冲器会引入噪声,还会引入偏移和增益误差。在高精度应用中应考虑所有这些因素。
调制器
ADS1120使用Δ∑调制器将模拟输入电压转换为脉冲编码调制(PCM)数据流。调制器在正常和占空比模式下以fMOD=fCLK/16的调制器时钟频率运行,在turbo模式下fMOD=fCLK/8,其中fCLK由内部振荡器或外部时钟源提供。表6显示了使用内部振荡器或4.096 MHz外部时钟的每个模式的调制器频率。
数字滤波器
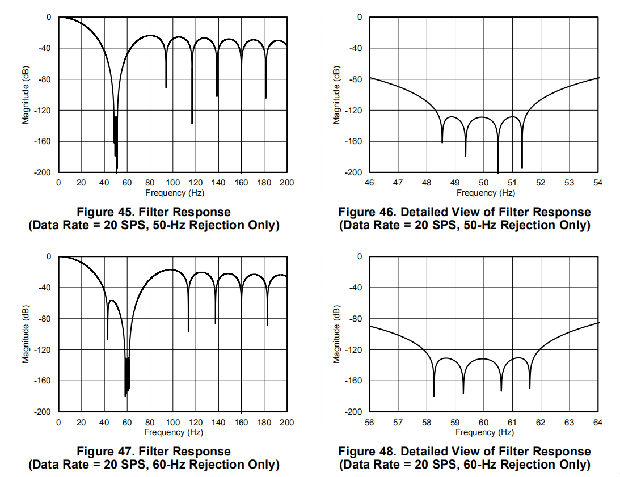
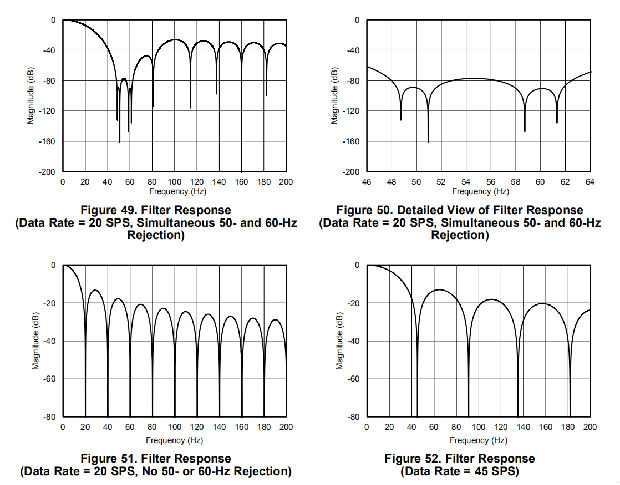
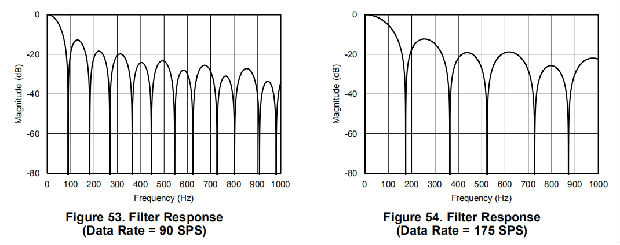
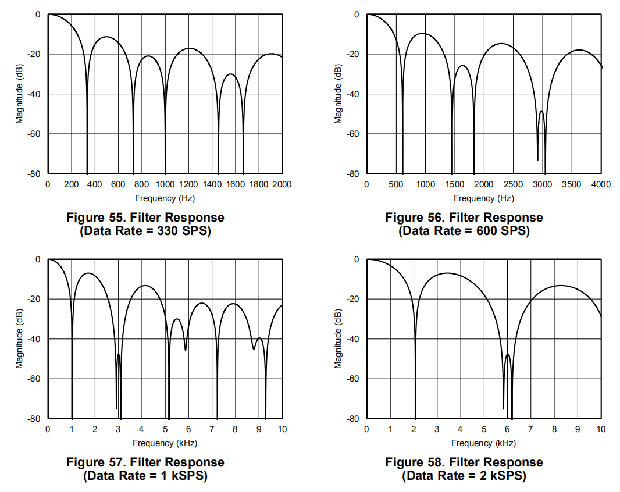
该器件采用线性相位有限脉冲响应(FIR)数字滤波器,对来自调制器的数字数据流进行滤波和抽取。数字滤波器可根据不同的数据速率自动调整,并始终在一个周期内稳定下来。仅当数据速率为5 SPS和20 SPS时,滤波器才能配置为拒绝50 Hz或60 Hz线路频率,或同时拒绝50 Hz和60 Hz。配置寄存器中的两个位(50/60[1:0])用于相应地配置滤波器。使用内部振荡器或外部4.096-MHz时钟时,数字滤波器的频率响应如图45至图58所示。
注意
如果使用频率不是4.096mhz的外部时钟,滤波器陷波器的变化与时钟频率成比例。例如,如果使用2.048-MHz时钟,则使用4.096-MHz时钟时以20 Hz出现的陷波出现在10 Hz处。
输出数据速率
表7显示了每个数据速率设置的实际转换时间。所提供的值是以使用时钟频率fCLK=4.096兆赫的外部时钟的tCLK周期表示的。如果使用频率不是4.096MHz的外部时钟,则数据速率按比例缩放。
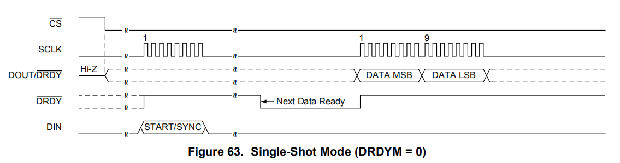
连续转换模式数据速率从一个DRDY下降沿定时到下一个DRDY下降沿。第一次转换在START/SYNC命令的最后一次SCLK下降沿后启动210·tCLK(正常模式,占空比模式)或114·tCLK(涡轮模式)。
单身-放炮模式数据速率从START/SYNC命令的最后一个SCLK下降沿定时到DRDY下降沿,并四舍五入到下一个tCLK。如果使用内部振荡器,则必须在单次触发模式下增加高达50μs(正常模式、占空比模式)或25μs(涡轮模式)的额外振荡器唤醒时间。内部振荡器在启动/同步命令的第一个SCLK上升沿开始通电。如果使用高于160 kHz(正常模式、占空比模式)或320 kHz(涡轮模式)的SCLK频率,则振荡器可能在启动/同步命令结束时未完全通电。然后,ADC等待直到内部振荡器完全通电,然后再开始转换。
占空比模式下的单发转换时间与正常模式下相同。有关占空比模式操作的更多详细信息,请参阅占空比模式部分。
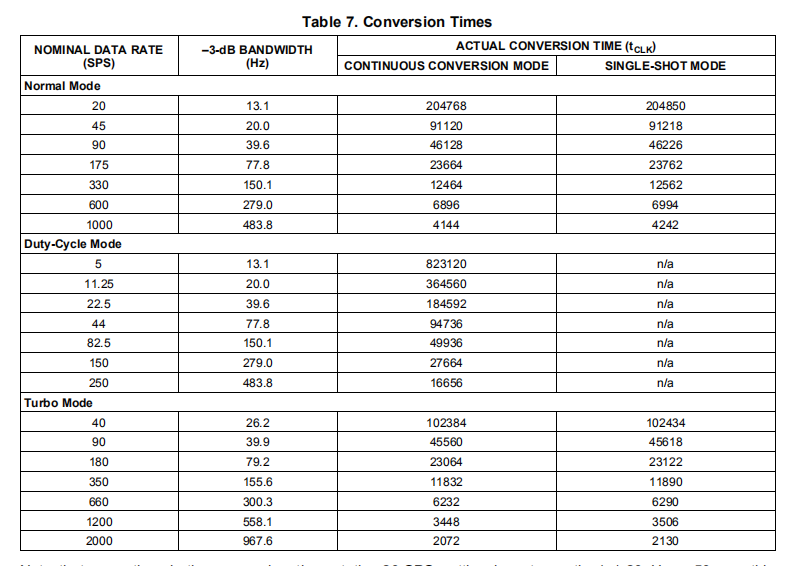
请注意,即使在20-SPS设置下的转换时间不完全是1/20 Hz=50 ms,此差异不影响50 Hz或60 Hz抑制。为达到规定的50 Hz和60 Hz抑制,外部时钟频率必须确保正好为4.096 MHz。
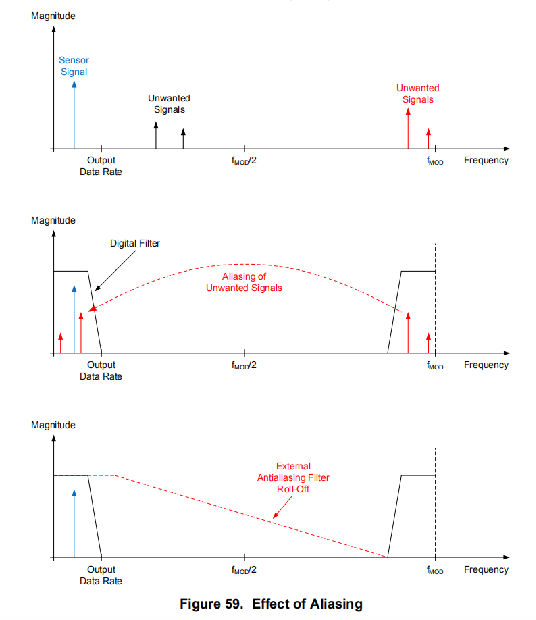
混叠
与任何采样系统一样,如果没有适当的抗锯齿过滤,则可能会发生混叠。当输入信号中高于ADC采样频率一半的频率分量(也称为Nyquist频率)被折叠并显示在采样频率的一半以下的实际频带中时,就会发生混叠。注意,在Δ∑ADC中,输入信号以调制器频率fMOD采样,而不是以输出数据速率采样。数字滤波器的滤波器响应以采样频率(fMOD)的倍数重复,如图59所示。信号或噪声达到滤波器响应重复的频率时被数字滤波器衰减。除非通过外部模拟滤波器衰减,否则在调制器频率或其倍数周围的输入信号中存在的任何频率分量都不会衰减,从而混叠回感兴趣的频带。有些信号固有的带宽限制;例如,热电偶的输出变化率有限。然而,这些信号在更高的频率上可能包含噪声和干扰成分,这些成分可以折回到感兴趣的频带中。一个简单的RC滤波器(在大多数情况下)足以抑制这些高频分量。在设计输入滤波电路时,一定要考虑滤波器网络和ADS1120的输入阻抗之间的相互作用。
电压基准
该装置提供集成低漂移,2.048-V参考。对于需要不同参考电压值或比率测量方法的应用,该设备提供两个差分参考输入(REFP0、REFN0和REFP1、REFN1)。此外,模拟电源(AVDD)可作为参考。差分参考输入允许参考共模电压自由。REFP0和REFN0是专用的参考输入,而REFP1和REFN1分别与输入AIN0和AIN3共享。参考输入被内部缓冲以增加输入阻抗。因此,当使用外部基准时,通常不需要额外的参考缓冲器,并且当用于比率测量应用时,基准输入不加载任何外部电路。参考源由配置寄存器中的两位(VREF[1:0])选择。默认情况下,内部参照处于选中状态。在通电后,当退出掉电模式或从外部参考源切换到内部参考源时,内部参考电压需要小于25μs的时间才能完全稳定。
时钟源
设备系统时钟可以由内部低漂移振荡器提供,也可以由CLK输入上的外部时钟源提供。在通电或复位以激活内部振荡器之前,将CLK引脚连接到DGND。在检测到CLK管脚上的两个上升沿后,随时将外部时钟连接到CLK管脚可使内部振荡器失活。然后,该设备在外部时钟上运行。在ADS1120切换到外部时钟后,如果不循环供电或发送重置命令,设备将无法切换回内部振荡器。
励磁电流源
该设备提供两个匹配的可编程励磁电流源(IDAC),用于RTD应用。电流源的输出电流可编程为50μA、100μA、250μA、500μA,1000μA或1500μA,使用配置寄存器中的相应位(IDAC[2:0])。每个电流源可连接到任何模拟输入(AINx)以及任何专用参考输入(REFP0和REFN0)。两个电流源也可以连接到同一个管脚上。IDAC的路由由配置寄存器中的位(I1MUX[2:0],I2MUX[2:0])配置。应注意不要超过IDACs的合规电压。换言之,IDAC布线到的管脚上的电压应限制在≤(AVDD–0.9 V),否则不符合规定的IDAC电流精度。对于三线制电阻式温度检测器应用,匹配的电流源可用于消除由传感器引线电阻引起的误差(有关详细信息,请参阅RTD测量部分)。
在使用位IDAC[2:0]将IDAC电流编程为相应值后,IDAC需要最多200μs才能启动。如果在同一个WREG命令期间没有写入配置寄存器2和3,TI建议首先使用位IDAC[2:0]将IDAC电流设置为各自的值,然后为每个IDAC选择路由(I1MUX[2:0],I2MUX[2:0])。
在单次触发模式下,如果IDAC[2:0]位设置为非000的值,则IDAC在任何两次转换之间保持活动状态。但是,每当发出POWERDOWN命令时,idac都会断电。
传感器检测
为了帮助检测可能的传感器故障,该设备提供内部10-μa烧毁电流源。当通过在配置寄存器中设置相应的位(bc)来启用时,一个电流源将电流输入到当前选择的正模拟输入(AINP),另一个电流源从所选的负模拟输入(AINN)中吸收电流。
在传感器开路的情况下,这些烧坏的电流源将正输入拉向AVDD,负极输入拉向AVSS,从而产生全刻度读数。满标度读数也可能表示传感器过载或基准电压缺失。接近零的读数可能表示传感器短路。注意,烧毁电流源的绝对值通常变化±10%,内部多路复用器增加了一个小的串联电阻。因此,很难将传感器短路情况与正常读数区分开,尤其是在输入端使用RC滤波器的情况下。换句话说,即使传感器短路,通过外部滤波器电阻和多路复用器剩余电阻的电压降也会导致输出读数高于零。
如果传感器短路检测需要更高精度的电流源,TI建议使用励磁电流源(IDAC)。请记住,启用烧毁电流源时,功能传感器的ADC读数可能损坏。
低压侧电源开关
在模拟输入AIN3/REFN1和AVSS之间还集成了一个低导通电阻的低压侧电源开关。此电源开关可用于降低桥式传感器应用中的系统功耗,方法是在转换之间切断桥接电路。设置配置寄存器中的相应位(PSW)时,开关在发送启动/同步命令时自动关闭,在发出断电命令时打开。注意,如果PSW位设置为1,在单次触发模式下转换之间,开关保持闭合。通过将PSW位设置为0,可以随时打开开关。默认情况下,开关始终打开。
系统监视器
该装置提供了对AVDD模拟电源和外部基准电压的监控手段。要选择任何监测电压,内部多路复用器(MUX[3:0])必须在配置寄存器中进行相应配置。在使用监控功能时,无论配置寄存器设置如何,设备自动绕过PGA并将增益设置为1。请注意,系统监视器功能只提供粗略的结果,并不意味着是精确测量。
当测量模拟电源(MUX[3:0]=1101)时,得到的转换大约为(AVDD–AVSS)/4。无论在配置寄存器(VREF[1:0])中选择了什么参考源,设备都使用内部2.048-V基准进行测量。
当监测两个可能的外部参考电压源(MUX[3:0]=1100)中的一个时,结果约为(VREFPx–VREFNx)/4。REFPx和REFNx表示在配置寄存器(VREF[1:0])中选择的外部参考输入对。设备自动使用内部基准进行测量。
偏移量校准
内部多路复用器提供将PGA输入(AINP和AINN)短接至中间电源(AVDD+AVSS)/2的选项。此选项可用于测量和校准设备偏移电压,方法是将短路输入电压读数的结果存储在微控制器中,然后从随后的每次读数中减去结果。TI建议在输入端短路的情况下读取多个读数,并对结果进行平均,以减少噪声的影响。
电源
该设备需要两个电源:模拟(AVDD、AVSS)和数字(DVDD、DGND)。模拟电源可以是双极性的(例如,AVDD=+2.5 V,AVSS=–2.5 V)或单电源(例如,AVDD=+3.3 V,AVSS=0 V),并且独立于数字电源。数字电源设置数字输入/输出电平。电源可按任何顺序排列,但在任何情况下,任何模拟或数字输入不得超过各自的模拟或数字电源电压限制。
温度传感器
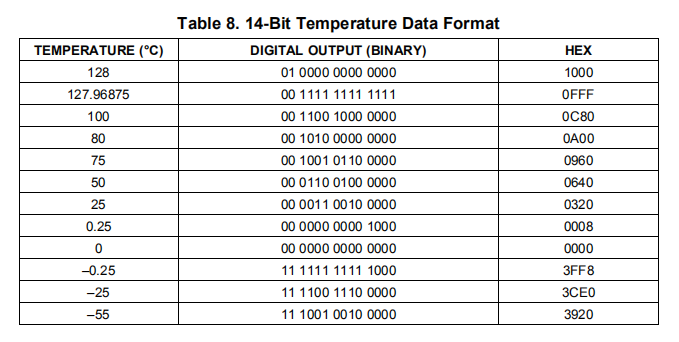
当配置寄存器中的TS位启用时,设备的温度测量模式被配置为14位结果。数据以最高有效字节(MSB)开始输出。当读取两个数据字节时,前14位用于指示温度测量结果。最后2位是随机数据,必须忽略。也就是说,14位温度结果在16位转换结果中左对齐。一个14位LSB等于0.03125°C。负数以二进制2补码格式表示。
从温度到数字代码的转换
对于正温度(例如+50°C):
对正数不执行二补运算。因此,只需将数字转换为14位左对齐格式的二进制代码,MSB=0表示正号。示例:+50°C/(每次计数0.03125°C)=1600=0640h=00 0110 0100 0000
对于负温度(例如-25°C):
通过对绝对二进制数进行补码并加1来生成负数的两个补码。然后,用MSB=1表示负号。
例如:|–25°C |/(每次计数0.03125°C)=800=0320h=00 0011 0010 0000
双补格式:11 1100 1101 1111+1=11 1100 1110 0000
从数字代码到温度的转换
要从数字代码转换为温度,首先检查MSB是0还是1。如果MSB为0,只需将十进制代码乘以0.03125°C即可得到结果。如果MSB=1,则从结果中减去1并补足所有位。然后,将结果乘以-0.03125°C。
示例:设备回读0960h:0960h的MSB=0。
0960小时·0.03125°C=2400·0.03125°C=+75°C
示例:设备读回3CE0h:3CE0h的MSB=1。
补齐结果:3CE0h→0320h
0320小时·0.03125°C=800·0.03125°C=–25°C
重置并通电
当设备通电时,执行复位。作为重置过程的一部分,设备将配置寄存器中的所有位设置为各自的默认设置。默认情况下,设备设置为单发模式。通电后,设备使用默认寄存器设置执行单个转换,然后进入低功率状态。通电行为旨在防止电源需求紧张的系统在通电期间遇到电流浪涌。复位过程大约需要50μs。之后,所有内部电路(包括基准电压)都稳定,并且可以与设备进行通信。
转换模式
该装置可以在两种转换模式中的一种操作,该转换模式可由配置寄存器中的CM位选择。这些转换模式是单次或连续转换模式。
单发模式
在单发模式下,设备仅在发出启动/同步命令时执行转换。因此,该设备执行一次转换,然后返回到低功耗状态。内部振荡器和所有模拟电路(励磁电流源除外)关闭,而设备在这种低功耗状态下等待,直到下一次转换开始。此外,对任何配置寄存器的每次写入访问都会启动一个新的转换。在转换进行时写入任何配置寄存器的功能是作为一个新的开始/同步命令来停止当前的转换并重新启动一个新的转换。每次转换都是完全固定的(假设模拟输入信号在转换开始前稳定到其最终值),因为设备数字滤波器在一个周期内稳定下来。
连续转换模式
在连续转换模式下,设备连续执行转换。转换完成后,设备将结果放入输出缓冲区,并立即开始另一次转换。
要启动连续转换模式,必须先将CM位设置为1,然后再执行启动/同步命令。在START/SYNC命令的最后一个SCLK下降沿之后,第一个转换从210·tCLK(正常模式,占空比模式)或114·tCLK(涡轮模式)开始。在未发出START/SYNC命令时写入任何配置寄存器将启动单个转换,而在正在进行的转换过程中对配置寄存器的写入访问将重新启动当前转换。TI建议始终在CM位设置为1后立即发送启动/同步命令。
工作模式
除了不同的转换模式外,该设备还可以在不同的工作模式下工作,这些模式可以被选择来权衡功耗、噪声性能和输出数据速率。
正常模式
正常模式是设备运行的默认模式。在此模式下,Δ∑ADC的内部调制器以fMOD=fCLK/16的调制器时钟频率运行,其中系统时钟(fCLK)由内部振荡器或外部时钟源提供。使用内部振荡器时,调制器频率为256 kHz。正常模式提供输出数据速率选项,范围为20 SPS到1 kSPS,带内部振荡器。数据速率由配置寄存器中的DR[2:0]位选择。在使用时钟频率不是4.096mhz的外部时钟源的情况下,数据速率相应地缩放。例如,使用fCLK=2.048 MHz的外部时钟可产生10到500 SPS的数据速率。
占空比模式
当降低输出数据速率时,Δ∑ADC的噪声性能通常会得到改善,因为可以对内部调制器的更多样本进行平均以产生一个转换结果。在功耗至关重要的应用中,可能不需要在低数据速率下改善噪声性能。对于这些应用,该设备支持自动占空比模式,通过在转换之间周期性地进入低功耗状态,可以产生显著的节能效果。原则上,设备以正常模式运行,占空比为25%。此功能意味着设备以正常模式运行时相同的方式执行一次转换,但随后自动进入三个连续转换周期的低功耗状态。因此,占空比模式下的噪声性能相当于正常模式下的四倍数据率下的噪声性能。使用内部振荡器时,占空比模式下的数据速率从5 SPS到250 SPS。
内核加速模式
需要高达2 kSPS的更高数据速率的应用程序可以在turbo模式下操作设备。在此模式下,内部调制器以更高频率fMOD=fCLK/8运行。当使用内部振荡器或外部4.096-MHz时钟时,fMOD等于512 kHz。注意,由于调制器以更高的频率运行,所以设备功耗增加。
断电模式
当发出断电命令时,设备在完成电流转换后进入断电模式。在这种模式下,所有的模拟电路(包括基准电压和两个idac)都会断电,而设备通常只使用400na的电流。在此期间,设备保存配置寄存器设置并响应命令,但不执行任何数据转换。
发出启动/同步命令唤醒设备,并根据CM位选择的转换模式启动单个转换或启动连续转换模式。写入任何配置寄存器位也会唤醒设备,但无论设备设置为何种转换模式(CM),都只会启动一次转换。
串行接口
设备的SPI兼容串行接口用于读取转换数据、读取和写入设备配置寄存器以及控制设备操作。仅支持SPI模式1(CPOL=0,CPHA=1)。可使用四路(或双路)控制信号。在后一种情况下,如果串行总线不与任何其他设备共享,则CS可能被捆绑在低位。专用数据就绪信号(DRDY)可配置为与DOUT/DRDY共享。
芯片选择(CS)
芯片选择(CS)是一种低输入,用于选择SPI通信的设备。当多个设备共享同一个串行总线时,此功能非常有用。在串行通信期间,CS必须保持在低位。当CS取高时,串行接口复位,SCLK被忽略,DOUT/DRDY进入高阻抗状态;因此,DOUT/DRDY无法指示数据何时准备就绪。DY总线上的多个设备的当前状态是不间断的。如果串行总线不与另一个外围设备共享,则CS可能被捆绑在低电平。
串行时钟(SCLK)
串行时钟(SCLK)具有施密特触发输入,用于分别在DIN和DOUT/DRDY引脚上对输入和输出数据进行时钟。即使输入有滞后,TI建议尽可能保持SCLK的干净,以防止小故障意外地转移数据。如果在13955·tMOD(正常模式,占空比模式)或27910·tMOD(涡轮模式)内未发送完整命令,串行接口复位,下一个SCLK脉冲开始新的通信循环。当串行接口传输中断时,此超时功能可用于恢复通信。当串行接口空闲时,保持SCLK低。
数据就绪(DRDY)
DRDY指示新的转换结果何时可以检索。当DRDY下降时,新的转换数据准备就绪。DRDY在下一个SCLK上升沿上高跃迁。当连续转换模式下没有读取数据时,DRDY保持低位,但在下一个DRDY下降沿前2·tMOD脉冲高。DRDY引脚始终处于主动驱动状态,即使CS很高。
数据输入(DIN)
数据输入引脚(DIN)与SCLK一起用于向设备发送数据(命令和寄存器数据)。设备将数据锁存在SCLK下降沿上的DIN上。该设备从不驱动DIN引脚。
数据输出和数据准备(DOUT/DRDY)
DOUT/DRDY具有双重功能。此引脚与SCLK一起用于从设备读取转换和寄存器数据。DOUT/DRDY数据在SCLK上升沿外移。当CS高时,DOUT/DRDY进入高阻抗状态。
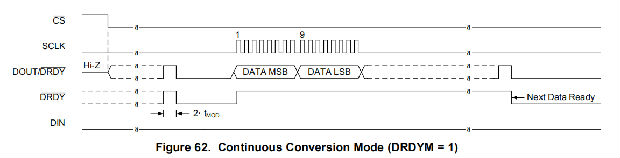
此外,DOUT/DRDY引脚也可以通过在配置寄存器中设置DRDYM高电平来配置为数据就绪指示器。DOUT/DRDY在DRDY引脚变低的同时转换为低电平,以指示新的转换数据可用。这两个信号都可以用来检测新数据是否准备就绪。但是,由于当CS较高时DOUT/DRDY被禁用,因此当SPI总线上存在多个设备时,监视转换结束的推荐方法是使用专用DRDY管脚。
数据格式
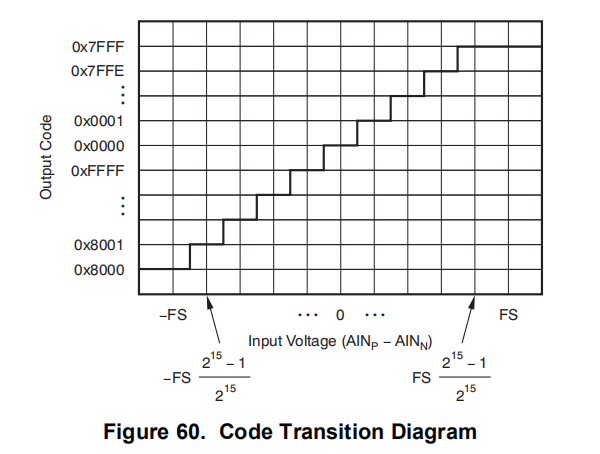
该设备以二进制2补码格式提供16位数据。正的满标度输入产生7FFFh的输出代码,负的满标度输入产生8000h的输出代码。对于超过满标度(FS)的信号,输出会在这些代码处截断。表9总结了不同输入信号的理想输出代码。
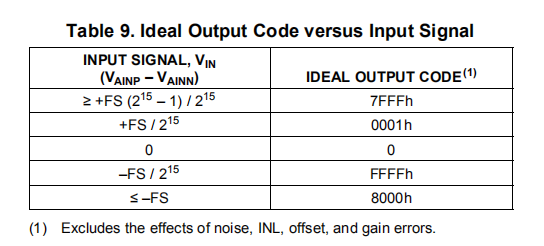
模拟输入信号到输出代码的映射如图60所示。
命令
设备提供六种不同的命令来控制设备的操作,如表10所示。四个命令是独立的指令(复位、启动/同步、断电和RDATA)。从设备读取(RREG)和写入(WREG)配置寄存器数据的命令需要附加信息作为指令的一部分。
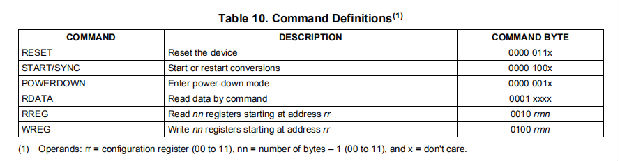
重置(0000 011x)
将设备重置为默认值。
启动/同步(0000 100x)
在单次触发模式下,启动/同步命令用于启动单个转换,或(在进行转换期间发送时)重置数字滤波器,并重新启动单个新转换。当设备设置为连续转换模式时,必须发出一次启动/同步命令才能开始连续转换。在连续转换模式下转换时发送START/SYNC命令将重置数字滤波器并从那里开始转换。
断电(0000 001x)
POWERDOWN命令将设备置于断电模式。此命令关闭所有内部模拟组件,打开低端开关,关闭两个IDAC,但保留所有寄存器值。一旦发出START/SYNC命令,所有模拟元件都将恢复到以前的状态。
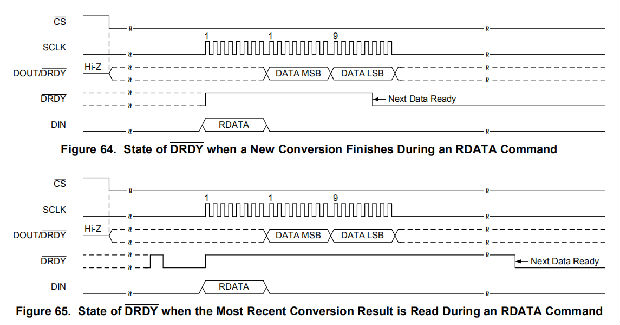
RDATA(0001-xxxx)
RDATA命令使用最新的转换结果加载输出移位寄存器。当DOUT/DRDY或DRDY未被监视时,可以使用此命令来指示新的转换结果可用。如果转换在RDATA命令字节的中间完成,则将更可靠的结果(旧结果或新结果)加载到输出移位寄存器中。DRDY管脚的状态表示加载旧结果还是新结果。如果加载了旧的结果,DRDY将保持在低位,表示新的结果尚未被读出。新的转换结果在DRDY较高时加载。
RREG(0010 rrnn)
RREG命令从寄存器地址rr开始从设备配置寄存器读取nn(要读取的字节数–1)指定的字节数。命令在RREG命令字节后的nn+1字节被打卡后完成。例如,从配置寄存器1(rr=01)开始读取三个字节(nn=10)的命令是0010 0110。
WREG (0100 rrnn)
WREG命令将nn(要写入的字节数–1)指定的字节数写入设备配置寄存器,从寄存器地址rr开始。命令在WREG命令字节后的nn+1字节被时钟记录后完成。例如,从配置寄存器0(rr=00)开始写入两个字节(nn=01)的命令是0100 0001。在最后一个SCLK下降沿上更新配置寄存器。
读取数据
当新数据准备好检索时,输出引脚DRDY和DOUT/DRDY(如果在相应的DRDYM配置寄存器位中配置)转换为低电平。转换数据被写入内部数据缓冲区。当DRDY下降到较低水平时,可以直接从DOUT/DRDY上的缓冲区读取数据,而不必担心数据损坏。不必发送RDATA命令。数据在SCLK上升沿向外移动,MSB优先,由两个字节的数据组成。
图61至图63显示了在不使用RDATA命令时,在连续转换模式和单次触发模式下读取转换数据的时序图。
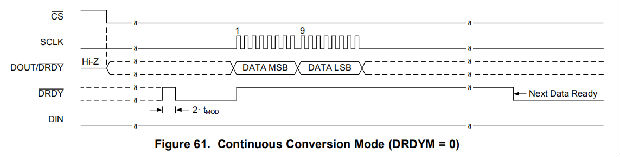
也可以在任何时候读取数据,而不必使用RDATA命令与DRDY信号同步。当发出RDATA命令时,当前存储在数据缓冲区中的转换结果可以在以下SCLK上升沿的DOUT/DRDY上移出。作为监视DRDY或DOUT/DRDY的替代方法,可以使用RDATA命令连续读取数据。在LSB被打卡后,必须对DRDY管脚进行轮询,以确定是否加载了新的转换结果。如果在读取操作期间完成了新的转换,但读取了以前转换的数据,则DRDY为低。否则,如果读取最近的结果,则DRDY为high。图64和图65说明了这两种情况下的行为。
发送命令
设备串行接口能够在读取转换数据时进行全双工操作,而无需使用RDATA命令。全双工操作意味着在读取转换数据的同时对命令进行解码。在数据读取操作期间,可以在任何8位数据边界上发送命令。当识别到RREG或RDATA命令时,当前数据读取操作将中止,转换数据将损坏,除非在检索转换结果的最后一个字节时发送该命令。设备在命令字节后的第一个SCLK上升沿开始在DOUT/DRDY上输出请求的数据。要想不中断地读取数据,请将数据保持在低位。
WREG命令可以在不破坏正在进行的读取操作的情况下发送。图66显示了在连续转换模式下读取转换数据时发送WREG命令以写入两个配置寄存器的示例。在命令被时钟记录后(在第32个SCLK下降沿之后),设备重置数字滤波器并开始使用新的寄存器设置进行转换。WREG命令可以在任何8位边界上发送。
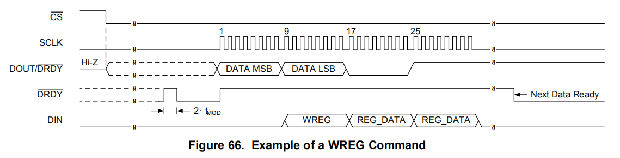
请注意,在执行RDATA或RREG命令时,串行接口不解码命令。也就是说,在发出RDATA命令之后,必须读取转换结果的所有16位,并且必须在发送RREG命令之后读取所有请求的寄存器,然后才能发出新的命令。
配置寄存器
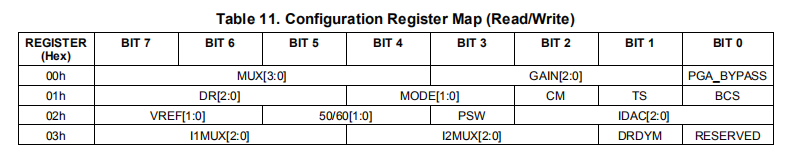
该设备有四个可通过SPI端口访问的8位配置寄存器。配置寄存器控制设备的运行方式,并且可以随时更改,而不会导致数据损坏。通电和复位后,所有寄存器均设置为默认值(均为0)。表11显示了配置寄存器的寄存器映射。
申请信息
以下章节给出了电路示例和在各种情况下使用该设备的建议。
基本连接和布局注意事项
对于许多应用,连接设备很简单。图67显示了ADS1120的主要电源和接口连接。
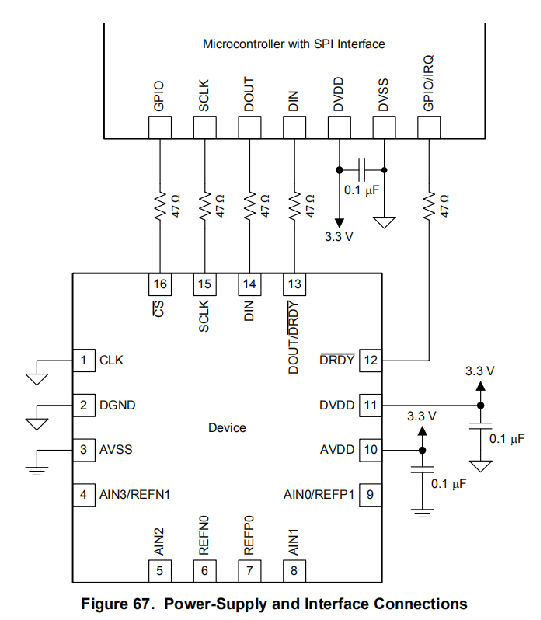
大多数微控制器SPI外围设备都可以和ADS1120一起工作。接口在SPI模式1下工作,其中CPOL=0,CPHA=1。在SPI模式1中,SCLK低怠速,数据仅在SCLK上升沿上启动或更改;数据由SCLK下降沿上的主从机锁定或读取。设备采用的SPI通信协议的细节可以在SPI定时特性中找到。
TI建议将47Ω电阻器与所有数字输入和输出引脚(CS、SCLK、DIN、DOUT/DRDY和DRDY)串联。这种电阻平滑了急剧的转变,抑制了过冲,并提供了一些过电压保护。必须注意仍然满足所有SPI定时要求,因为附加电阻与数字信号线上的总线电容相互作用。
良好的电源解耦对实现最佳性能至关重要。AVDD和DVDD都应该用至少0.1μF的旁路电容器进行解耦。旁路电容器应尽可能靠近电源插脚,采用低阻抗连接。对于非常敏感的系统,或在恶劣噪声环境中的系统,避免使用通孔连接旁路电容器可以提供更好的旁路和抗噪声能力。
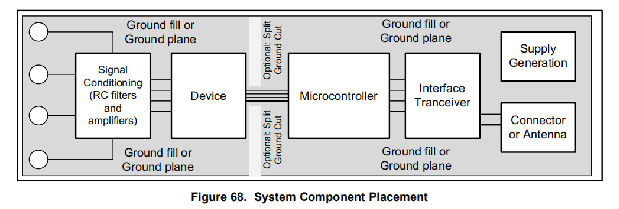
TI建议在为模拟和数字元件设计印刷电路板(PCB)时采用最佳设计实践。此建议通常意味着布局应将模拟组件[如ADC、放大器、基准、数模转换器(DAC)和模拟MUX]与数字组件[例如微控制器、复杂可编程逻辑器件(CPLD)、现场可编程门阵列(FPGA)、射频(RF)收发器]分开,通用串行总线(USB)收发器和开关调节器]。图68显示了一个良好的组件放置示例。虽然图68提供了一个很好的组件放置示例,但是每个应用程序的最佳布局都是由所采用的几何结构、组件和PCB制造能力所决定的。也就是说,没有一个布局对每个设计都是完美的,在使用任何模拟组件进行设计时,必须始终仔细考虑。
为改善噪声性能,不需要使用分离的模拟和数字接地层(尽管对于热隔离,此选项是值得考虑的)。然而,在没有元件的PCB区域使用实心接地平面或地面填充物对最佳性能至关重要。如果所使用的系统采用分体式数字和模拟接地层,TI通常建议接地层尽可能靠近设备连接在一起。
TI还强烈建议在给定系统中,数字元件,尤其是射频部分,尽可能远离模拟电路。此外,尽可能缩短数字控制轨迹穿过模拟区域的距离,并避免将这些轨迹放置在敏感的模拟元件附近。数字回流通常流经尽可能靠近数字通道的接地路径。如果飞机没有可靠的接地连接,这些电流可能会找到返回干扰模拟性能的电源的路径。布局对温度传感功能的影响比ADC功能的影响更为显著。
连接多个设备
当将多个ADS1120设备连接到单个SPI总线时,通过为每个支持SPI的设备使用专用芯片选择(CS)线,可以安全地共享SCLK、DIN和DOUT/DRDY。当各设备的CS转换为高电平时,DOUT/DRDY进入3状态模式。因此,无论配置寄存器中的DRDYM位设置为0还是1,DOUT/DRDY不能用于指示当CS为高时新数据可用。只有专用的DRDY引脚表示新数据可用,因为DRDY引脚即使在CS很高的情况下也会被激活。
然而,在某些情况下,DRDY引脚不能连接到微控制器。如果微控制器上没有足够的GPIO通道,或者串行接口必须电隔离,因此必须限制信道数量,则可能发生这种情况。因此,为了评估设备之一的新转换何时准备好,微控制器可以周期性地将CS丢弃到相应的设备并轮询DOUT/DRDY管脚的状态。当CS变低时,DOUT/DRDY引脚立即驱动高电平或低电平,前提是DRDYM位配置为1。如果DOUT/DRDY线在低CS上驱动低,则当前有新数据可用于打卡。如果DOUT/DRDY线驱动高,则没有新数据可用。要使此过程正常工作,在每次数据读取操作之后必须发送16个附加SCLK,以确保在新的转换完成之前DOUT/DRDY取高值。或者,可以使用RDATA命令随时从设备检索有效数据,而不必担心数据损坏。
热电偶测量
图69显示了使用内部高精度温度传感器进行冷端补偿时热电偶测量系统的基本连接。除了热电偶本身,唯一需要的外部电路是两个偏置电阻、一个简单的低通抗混叠滤波器和电源去耦电容器。
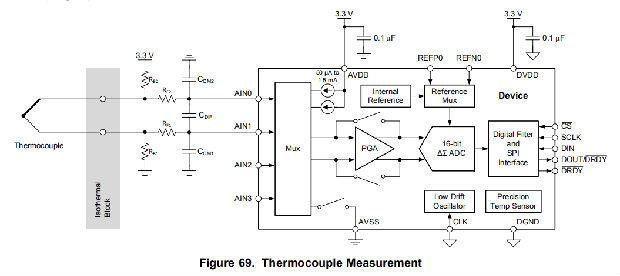
偏置电阻器RB1和RB2用于将热电偶的共模电压设置在PGA规定的共模电压范围内(在本例中,设置为中间电源AVDD/2)。如果应用要求热电偶偏向GND,则必须使用双极电源(例如,AVSS=–2.5 V和AVDD=+2.5 V)来满足PGA的共模电压要求,或者必须绕过PGA。选择偏压电阻值时,必须小心,以免偏压电流降低测量精度。偏压电流流过热电偶,会导致热电偶引线中的自热和附加电压降。
除了偏置热电偶,RB1和RB2也可用于检测热电偶导线开路。当其中一根热电偶引线失效断开时,偏置电阻将模拟输入AIN0和AIN1分别拉至AVDD和AVSS。因此,ADC读取的满标度值超出热电偶电压的正常测量范围,以指示该故障状态。
虽然设备数字滤波器衰减噪声的高频分量,TI通常建议在输入端提供一阶无源RC滤波器,以进一步提高性能。由RF1、RF2和差分电容CDIF构成的差分RC滤波器的截止频率为fC=1/[2π·(RF1+RF2)·CDIF]。还增加了两个共模滤波电容器CM1和CM2,以衰减高频共模噪声分量。TI建议差分电容器CDIF至少比共模电容器CM1和CM2大一个数量级(10x),因为共模电容器中的失配会导致差分噪声。
滤波电阻器RF1和RF2也用作限流电阻器。如果输入端出现过电压,这些电阻器将输入装置模拟输入端(AIN0和AIN1)的电流限制在安全水平。在选择滤波器电阻值时应小心,因为流入和流出设备的输入电流会导致电阻器之间的电压降。此电压降在ADC输入端显示为附加偏移误差。TI建议将滤波器电阻值限制在1KΩ以下。
该装置集成了一个高精度的温度传感器,可用于测量冷端温度。要测量ADS1120的内部温度,必须通过在配置寄存器中将TS位设置为1,将设备设置为内部温度传感器模式。为了获得最佳性能,仔细的电路板布局对于在冷端和器件封装之间获得良好的导热性至关重要。
但是,该装置不执行热电偶的自动冷端补偿。这种补偿必须在与设备接口的微控制器中完成。微控制器请求装置提供一个或多个热电偶电压读数,然后将装置设置为内部温度传感器模式(TS=1),以获取冷端温度。补偿冷端温度的计算必须在微控制器上实现。
在某些应用中,不能使用集成温度传感器(例如,如果精度不够高或设备不能放置在离冷端足够近的位置)。在这种情况下,设备的附加模拟输入通道可用于用热敏电阻、电阻式温度检测器或模拟温度传感器测量冷端温度。
RTD测量
该设备集成了所有必要的功能(如双匹配可编程电流源、缓冲参考输入、PGA等),以便于实现比率计量的2线、3线和4线RTD测量。图70显示了使用集成在装置中的励磁电流源来激励RTD以及实现RTD引线电阻自动补偿的比率式3线RTD测量的典型实施。
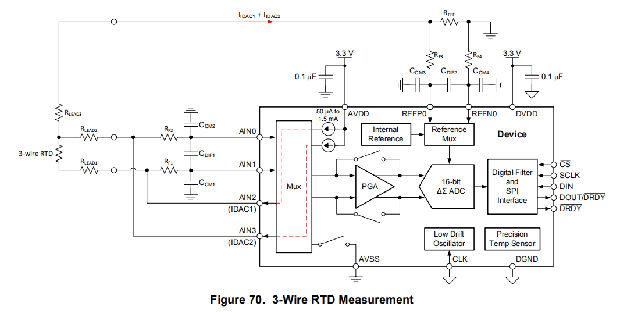
图70中的电路采用比例测量法。换言之,传感器信号(在这种情况下,通过电阻式温度检测器的电压)和ADC的参考电压来自同一激励源。因此,由温度漂移或噪声引起的误差会抵消,因为这些误差对传感器信号和参考信号都是常见的。
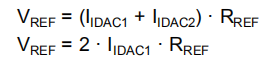
为了使用该装置实现比率式3线RTD测量,IDAC1连接至RTD的其中一根励磁引线,而IDAC2连接至第二根励磁导线。两个电流具有相同的值,可通过配置寄存器中的IDAC[2:0]位进行编程。该设备的设计确保了两个IDAC值紧密匹配,即使是在不同温度下。两个电流的总和流过一个精密的低漂移参考电阻,RREF。通过参考电阻产生的电压VREF如等式16所示。方程式17被用作ADC参考电压,因为IIDAC1=IIDAC2。
方程式18假设此时RTD(RLEADx)的单个引线电阻值为零。只有IDAC1激励RTD产生电压(VRTD),该电压与温度可靠的RTD值和IDAC1值成比例。

该装置使用PGA对RTD内部的电压进行放大,并将产生的电压与参考电压进行比较,以产生一个数字输出代码,该代码与方程式19至方程式21成比例:

从等式21可以看出,输出代码仅取决于RTD值、PGA增益和参考电阻(RREF),而不取决于IDAC1值。因此,励磁电流的绝对精度和温度漂移并不重要。然而,由于参考电阻的值直接影响测量结果,因此选择一个温度系数很低的参考电阻对限制由RREF温度漂移引起的误差非常重要。
第二个IDAC2用于补偿RTD引线电阻上的电压降引起的误差。三线电阻式温度检测器的三根引线通常具有相同的长度,因此,引线电阻也相同。另外,IDAC1和IDAC2的值相同。因此,通过ADC输入AIN0和AIN1的差分电压(VIN)如等式22所示:

当RLEAD1=RLEAD2且IIDAC1=IIDAC2时,式22减为式23:

换言之,只要引线电阻值和IDAC值匹配良好,RTD引线电阻上的电压降引起的测量误差就可以得到补偿。
一阶差分和共模RC滤波器(RF1、RF2、CDIF1、CCM1和CCM2)置于ADC输入以及参考输入(RF3、RF4、CDIF2、CCM3和CCM4)上。设计输入滤波器的相同指南适用于热电偶测量部分所述。为了获得最佳性能,TI建议匹配输入和参考滤波器的转角频率。有关匹配输入和参考滤波器的更多详细信息,请参阅应用报告RTD比率测量和使用ADS1148和ADS1248(SBAA201)进行过滤。
参考电阻RREF不仅用于为器件产生参考电压,还将RTD的共模电压设置在PGA规定的共模电压范围内。换言之,通过参考电阻的电压必须满足方程式13到方程式15的要求。
在设计电路时,还应注意满足IDACs的合规电压要求。IDAC要求最小净空(AVDD–0.9 V)才能准确操作。这一要求意味着必须始终满足等式24。

该设备还提供了将idac路由到用于测量的相同输入的可能性。如果滤波电阻值RF1和RF2足够小并且匹配良好,那么IDAC1可以路由到AIN1,IDAC2可以路由到AIN0,如图70所示。这样,即使两个共享同一参考电阻的3线电阻式温度检测器也可以用一个装置进行测量。
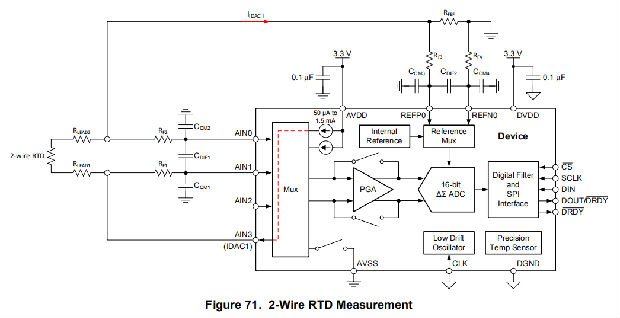
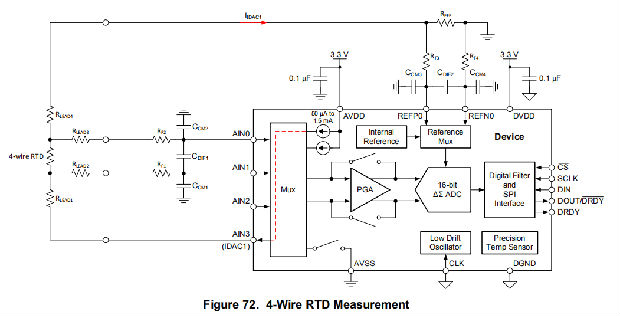
实施2线或4线RTD测量与图70所示的3线RTD测量非常相似,只是只需要一个IDAC。图71和图72分别显示了2线和4线RTD测量的典型电路实现。
桥梁测量
该设备提供了几个特性,以便于比率电桥测量的实现(例如增益高达128 V/V的PGA、缓冲、差分参考输入和低压侧电源开关)。
为了实现比率电桥测量,电桥激励电压同时用作ADC的参考电压,如图73所示。在这种结构下,励磁电压的任何漂移也会出现在参考电压上,从而消除漂移误差。两个设备参考输入对中的任何一个都可以连接到电桥励磁电压。但是,只有负参考输入(REFN1)可以内部路由到低压侧电源开关。通过将电桥的低压侧连接到REFN1,该装置可通过打开低压侧电源开关自动关闭电桥。当配置寄存器中的PSW位设置为1时,设备在每次发出断电命令时打开交换机,并在发送启动/同步命令时再次关闭交换机。
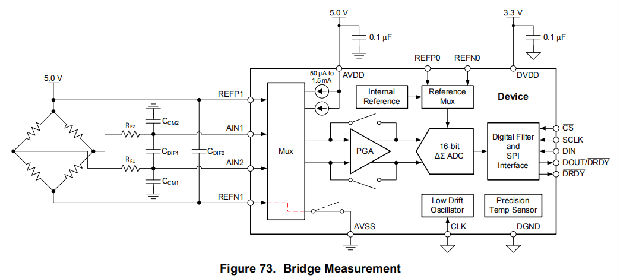
PGA提供高达128V/V的增益,这有助于放大小的差分电桥输出信号,以优化ADC满量程范围。采用一个激励电压等于器件电源电压的对称电桥,保证了该电桥的输出信号满足PGA的共模电压要求。
注意,最大输入电压限制为VIN(MAX)=[(AVDD–AVSS)–0.4 V]/增益,这意味着整个满标度范围[FS=(AVDD–AVSS)/增益]不能用于此配置。这种限制是由于PGA放大器(A1和A2)的输出驱动能力造成的;见图39。每个放大器的输出必须保持200mv远离轨道(AVDD和AVSS),否则PGA将变得非线性。因此,PGA的最大输出摆幅限制在VOUT=(AVDD–AVSS)–0.4v。
伪代码示例
下表显示了一个伪代码序列,其中包含设置设备和与设备接口的微控制器所需的步骤,以便在连续转换模式下从ADS1120获取后续读数。专用的DRDY管脚用于指示新转换数据的可用性。默认配置寄存器设置更改为增益=16、连续转换模式和同时50赫兹和60赫兹抑制。
通电;
延误;
将微控制器的SPI接口配置为SPI模式1(CPOL=0,CPHA=1);
如果CS引脚没有永久性地绑低,配置连接到CS的微控制器GPIO作为输出;
配置连接到DRDY引脚的微控制器GPIO作为中断输入;
将CS设置为设备低电平;
延误;
发送复位命令(06h),确认装置上电后复位正确;
使用WREG命令(43h、08h、04h、10h和00h)写入相应的寄存器配置;
延误;
作为健全性检查,使用RREG命令读回所有配置寄存器(23h);
延误;
发送启动/同步命令(08h),以连续转换模式开始转换;
延误;
清除CS到高(重置串行接口);
循环
{
等待DRDY变低;
取CS低;
延误;
发送16个SCLK上升沿,读出DOUT上的转换数据;
延误;
清除CS到高;
}
取CS低;
延误;
发送掉电命令(02h)停止转换,使设备进入断电模式;
延误;
清除CS到高;
TI建议在执行任何测量或更改PGA增益时运行偏移校准。例如,可以通过将输入端短路到中间电源(MUX[3:1]=1110)来测量设备的内部偏移。然后,微控制器从输入短路的设备中获取多个读数,并将平均值存储在微控制器存储器中。当测量传感器信号时,微控制器然后从每个设备读数中减去存储的偏移值,以获得偏移补偿结果。
